


一种新型微小爬壁机器人
2007-08-29 来源:现代电子技术
1 引 言
近年来,机器人在国家安全、工业检测和反恐任务中越来越得到人们的重视,国际上许多成功的机器人平台已经建立,如Carnegie Mellon大学的Millibot机器人,Min-nesota大学的Scout机器人,iRobot公司的Urban机器人等。然而,这些机器人都不具有爬壁、在天花板行走和穿越管道的能力。目前,有许多专家对具有爬壁能力的机器人做了研究,Ali Sadegh运用旋涡回转装置设计的爬壁机器人,Kevin Rogers运用吸附技术设计的连续运动清扫爬壁机器人,Carlos Grieco运用磁性吸附技术设计的六足爬壁机器人,Shigeo HIROSE运用磁性吸附技术设计的爬壁机器人,重庆大学潘英俊教授运用磁性吸附技术设计的步行式爬壁机器人,美国学者运用螺旋推进器做力源设计的爬壁机器人。但由于这些机器人都具有体积大、价格昂贵、重量大、转弯特性差、控制系统复杂等缺点,极大地限制了这些机器人的应用。
本文介绍的磁驱动微小爬壁机器人,采用电磁吸附技术,尺蠖运动原理,具有结构简单、重量轻、加工制作容易、控制灵活、控制电路简单、转弯速度快等特点。
2 爬壁机器人的结构和运动原理
2.1 爬壁机器人的结构
图1是微小爬壁机器人的外形结构示意图,该微小机器人采用电磁驱动技术,由前后挡板(1,3)、软磁(2)、驱动线圈(4)、前后脚(5,8)、永磁铁(6)、导轨(7)、微小电机(9)、小支架(10)、扭簧(111)、大支架(12)、转轴(13)等部分组成。其中,大支架与微小电机固定连接,小支架与扭簧固定连接,扭簧和大支架通过支架上的导向孔实现滑动连接,大支架与小支架之间通过转轴连接,微小电机的轴固定在小支架上,小支架固定在前挡板上,前脚固定在微小电机上,后脚和永磁固定在后挡板上,软磁固定在前挡板上,前后挡板之间通过两对滑动导轨连接。
利用通电软磁和永磁铁之间的相对运动来实现机器人的动作,即借助于由拉推式磁路组成的直线运动式磁力驱动器和门型坡莫合金软磁绕制的机器人脚线圈的相互配合,运用软磁和永磁之间“同极排斥、异极吸引”的原理,通过给线圈加一系列时序脉冲控制信号改变软磁的极性或动作,达到模仿尺蠖的运动方式实现机器人爬壁的目的。

2.2 爬壁机器人的运动原理
图2是机器人直线行进原理图,设线圈未通电时为原始状态1,此时分别对机器人前脚(线圈1)、后脚(线圈2)和驱动器(线圈3)通以图3所示的控制时序信号。在t1~t2时间段,线圈1不通电,线圈2、3通正电平,机器人的前脚在软磁和永磁的相互作用下向前迈出一步,如图2状态2所示;在t2~t3时间段,线圈1通正电平,线圈2不通电,线圈3通负电平,机器人的后脚软磁和永磁的相互作用下向前跟上一步,完成机器人一个步态,如图2状态3、4所示。反复执行状态1~4,就可以实现机器人的连续直线运动。

图4是机器人转弯行进原理图,设线圈未通电时为原始状态1,此时分别对机器人前脚(线圈1)、后脚(线圈2)、驱动器(线圈3)和微小电机(线圈4)通以图5所示的控制时序信号。在t1~t2时间段,线圈1、3不通电,线圈2、4通正电平,机器人的前脚在微小电机的作用转过一个角度,如图4状态2所示。在t2~t3时间段,线圈1通正电平,线圈2、3、4不通电,在扭簧的作用下机器人本体转过与前脚转过的相同的一个角度,此时完成了机器人的转弯过程,到达预定的位置,如图4状态3所示。在t3时刻以后的时间段,机器人开始直线行进。
由于机械系统都存在响应滞后的缺点,在实际操作中线圈1、2和线圈3、4之间在时序上可以设计一段时间差,以使机器人的运动更加稳定。

3 驱动信号的产生
从机器人的运动原理可知,只要在线圈中连续通入图3、图5所示的控制信号,就能够实现机器人的各种运动状态,图6是产生这些驱动控制信号的系统框图。采用C或汇编语言在AT89C52中编成产生整个爬壁机器人需要的6路脉冲控制信号(其中微小电机和驱动器各2路),其中4路信号与2片正反转驱动芯片LG9110相连,控制微小电机和驱动器,另外2路与2片SN75451/SN75452相连,控制机器人的前后脚。
4 实验测试
由于磁场分布复杂,不可能对整个驱动器的驱动力进行理论分析计算,为此设计了图7所示的测力计装置,实际测试爬壁机器人驱动器的垂直力为F1,驱动力为F2,主要由夹具3和5、三维微位移工作台1、2台高精度微力测量仪6和7等组成,测量时将软磁4和永磁2安装在测力计装置上,通过调节三维微位移工作台进行测量。如图8所示,设永磁和软磁的垂直距离为σ mm,水平位移为x mm。
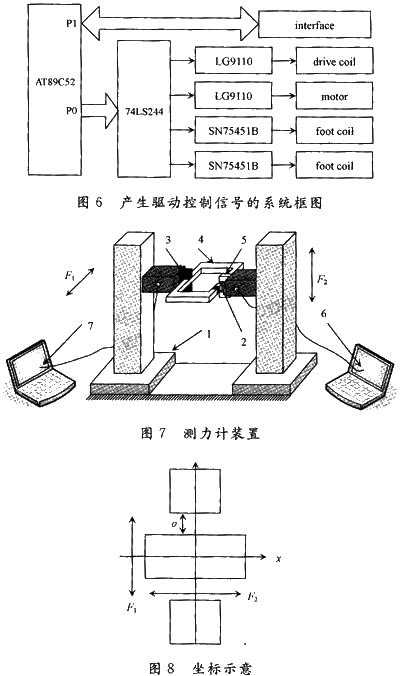
图9是利用文献[5]中的测力装置和图7所示的测力装置对步行式机器人和本(爬行式)机器人静态垂直力F1与σ相互关系的测试曲线,图10是动态垂直力F1与σ相互关系的测试曲线,图11是动态驱动力F2与x相互关系的测试曲线,其中曲线1代表本爬壁机器人,曲线2代表步行式爬壁机器人。可以看出:该爬壁机器人动静态垂直力F1均趋近于0,其驱动力F2是步行式爬壁机器人的3倍以上。

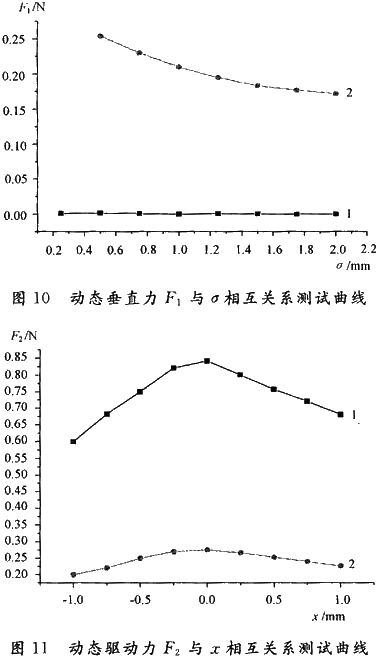
图12是该爬壁机器人行进速度和驱动信号频率的关系测试曲线,其中曲线1代表本爬壁机器人的速度,曲线2代表步行式爬壁机器人的速度,曲线3表示本爬壁机器人的理论速度。图13是实验测试用的两台机器人,其中图13(a)是步行式爬壁机器人,图13(b)是爬行式爬壁机器人。以上所有测试结果均在如下条件下完成:
(1) 线圈匝数700匝;
(2) 控制信号电压5 V;
(3) σ=1 mm。


5 结语
实验证明:
(1) 该爬壁机器人相对文献[5-8]中采用控制信号频率达到机器人转弯的目的而言,其转弯动作更加准确快速,控制简单,如果把微小电机换为微小步进电机,可以实现对转弯角度的精确控制;
(2) 机器人驱动线圈的匝数范围为700匝左右,并最好能够形成闭合磁路;
(3) 永磁铁和电磁铁之间的距离越近越好;
(4) 通过优化设计控制时序信号,可以提高机器人的运行稳定性;
(5) 该机器人重约30克,体积为30 mm×15 mm×20 mm,运动速度可以达到1.1 cm/s,可以在0~90°的导磁面上爬行;
(6) 为了防止该机器人在行进过程中出现“脱轨”现象,需要给机器人附加限位机构。
下一篇:新型配电自动化监测控制器的设计
- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- Allegro MicroSystems推出先进磁性和电感式位置传感解决方案
- 中科阿尔法磁性旋转编码器AME256用于电机控制器,可达到12bit的高精度
- 永磁电机一般用哪些类型磁性材料
- 打破陈规:磁性封装新技术将如何重塑电源模块的未来
- 我国科学家带领突破磁性超导,刷新电子谱学空间能量分辨率纪录
- 磁性“藤蔓”机器人问世,可用于治疗疑难部位的肿瘤
- 德州仪器推出电源模块全新磁性封装技术
- 德州仪器推出电源模块全新磁性封装技术,将电源解决方案尺寸缩小一半
- Allegro MicroSystems 重新定义磁性电流感测技术
- CGD和QORVO将彻底改变电机控制解决方案
- 博世与清华大学续签人工智能研究合作协议 共同推进工业领域人工智能发展
- 兆易创新MCU新品重磅揭幕,以多元产品和方案深度解锁工业应用场景
- 当AI遇上边缘计算,研华以Edge AI推进嵌入式产业变革
- 研华科技:投身Edge AI创新,驱动智能未来
- 英飞凌推出全球首款非接触式支付卡技术SECORA™ Pay Green,最多减少100%的塑料垃圾
- 凝心聚力推动创新转型,清洁能源时代下特高压领域谱写更多可能性
- 恩智浦开展技术日巡回研讨会,全维赋能大众市场创新发展
- ACM6754 24V/4.8A三相无感无刷直流BLDC电机驱动芯片方案
- 罗克韦尔自动化亮相第七届进博会,三大引擎链动可持续未来
-

控制系统仿真与CAD
-

PLC功能指令应用详解
-

非线性控制理论(浙大)
-

对话ADI和世健 看工业市场发展的新机遇
-

电力工程信号处理应用
-

周公系列讲座——温度仪表
-

简洁的过零调功器电路设计与分析
-

单稳态控制电路设计与分析
-

光控电路设计与分析
-

CCFL的工作原理及电子驱动电路解析
-

开关电源的基本组成及工作原理
-

基于M66T旋律发生器的电路图解析