


基于AVR单片机的舵机驱动电路详解
2020-01-31 来源:elecfans
舵机( servo motor),又名伺服电机,主要是由外壳、电路板、马达、减速齿轮和电位器构成。舵机主要适用于那些需要角度不断变化并可以保持的控制系统,比如人形机器人的手臂和腿,车模和航模的方向控制。目前,市面上的成熟的舵机工业产品都来自日本、韩国和我国台湾地区。本文基于舵机工作的基本原理,选用Atmega8L单片机作为舵机电路板控制芯片,对舵机控制进行了一系列实验,并取得了很好的实验效果。
舵机工作原理
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。

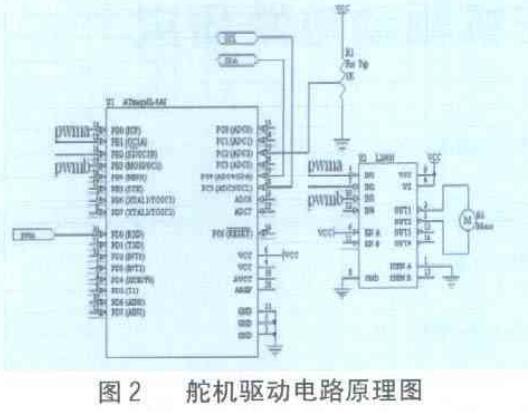
基于AVR单片机的舵机驱动电路原理图
1、舵机驱动电路板接受上位机PWM信号对电机控制
舵机的转角范围通常是0到180度,舵机的转角通常由脉宽来控制,一般舵机都会有三根输入线(电源正,地,信号线), PWM信号由信号线输入,上位机产生周期为20ms左右的方波作为输入信号,方波的占空比决定舵机转的角度。如图1所示:

根据以上原理,设计出以下实验电路(图2)。 通过A tmega8L单片机和电机专用驱动芯片L298N的连接实现了舵机工作的基本原理。
AVR单片机是Atmel公司8位RISC结构的单片机。具有系统内可编程存储器Flash电擦写可编程存储器EEPROM 随机访问存储器RAM 模数A/D转换器、大量I/0口、 16/8位定时器、 RS-232通讯接口UART,两线串行接口TWI以及其他很多功能的单片集成电路。本文采用的是AVR系列常用型号的产品ATMega8L系统时钟频率使用外部晶振7.3728Mhz,工作电压5V。
L298是双H型桥高电压大电流集成电路,可用来驱动继电器、线圈、直流电动机和步进电动机等。原理图如图3所示,Vss接逻辑控制的电源。Vs为电机驱动电源。 IN1-IN4输入引脚为标准TTL逻辑电平信号,ENAENB引脚则为使能控制端。本来是通过IN1--IN4输入用来控制H型桥的开与关即实现电机的正反转。ENA、ENB使能控制端,用来输入PWM信号实现电机调速。本文使用了L298N的一组H型桥,ENA使能控制端一直导通,输入IN1,IN2PWM信号来控制电机速度和转向。

上位机发出的PWM信号通过Atmega8L的一个I/0口读入,为了读取PWM信号的高电平时间,采用计数方式,使用Atmega8L的T0计数,T0是一个8位定时器,定时器分频为8分频,TCCR0=0x02。若读入PD0的PWM信号是高电平,T0开始计时,T0的计数值TCNTO从0计数到255,产生计数溢出中断,在中断服务程序里设置一个累加器COUNT,每次进入中断服务程序COUNT加1。当PD0口读入的PWM信号是低电平时,T 0停止计时,计算出整个PWM高电平时间是:INPUTPWM= (COUNTX 255+TCNT0) /921. 6 (ms)。若PD0口读入的PWM高电平时间低于1ms,在程序中处理INPUTPWM=lms,若高于2ms,则INPUTPWM= =2ms。
在实验过程中,为了避免第一次计时未能从PWM信号的高电平始端计时,忽略PWM信号第一次高电平的时间,从PD0口读到的第二个高电平开始计时。
读电位器电压,通过A/D转换读取当前电位器的电压值( ADC), Atmega8L提供最高分辨率为10位的A/D转换精度,即转换后的电压值从0到1023基于这一考虑,PDO读入的PWM信号转换为电压值target=(INPUTPWM-1)*1023,采用这一设计,有利于减少P WM信号转换为相应电压值的复杂过程。

用Atmega8L的Tl定时器产生两路16位pwm信号,其占空比决定控制电机的转速,占空比越大,电流持续时间越长,舵机转动越快,反之则越慢。为了与A/D转换的最大值1023相匹配,减少计算复杂度,T1定时器采用8号相位与频率修正PWM模式,让计数最大值ICR1=1023,其比较值0CR1=( ADC-target)。为了控制电机的转向,若(ADC- - target)。随着电机的转动,采集的电位器的电压值不断与目标值接近,OCR1的值变小,占空比也变小,舵机转速也持续变慢,理论上,当ADC与target相等, 占空比为0,电机到达目标位置,停止转动。电机的控制流程图如图4所示。
3、PID调节
理论上当电机达到目标位置时,电机将停止转动,此时没有电流流过电机,但是舵机是一个需要保持角度的系统,并且保持力越大越好,即舵机的扭矩(torque)越大越好。具体而言,当电机到达目标位置时,电机停止转动,但是此时只要稍微有外力转动电机,电机将流过一个与外力相逆的电流来保持角度,这电流就是堵转电流。因此,一方面要求电机到达目标位置电流越来越小,这样容易停止,另一方面要求在偏离目标位置的微小区域电机又要有很大的堵转电流,使用PID(ProportionalIntegralDifferential)调节就可以很好的解决这一矛盾。
PID可以很好地控制电机很快地到达目标位置而不产生抖动。对于舵机而言,上面提到的定时器T1的比较值0CR1就简单的给定为当前的电机位置和目标位置的差值,引入PID控制后,这一项乘以一个系数kp,作为OCR1的比例项;上一周期的电机位置和这一周期的电机位置的差值乘以系数kd,作为OCR1的微分项,这一项的作用主要是如果电机两次位置的差值很大的话,可以加快电机的转速;每一周期电机位置和目标位置的差值的平均值乘以系数ki作为OCR1的积分项,这一项的作用是使电机阻尼来减少电机抖动。把这三项加起来作为OCRl的值,作为T1定时器的比较值。公式如下:
OCRl=kpX(ADC-target)+kiX((ADC-target)/n)+HkdX(adcvalpre-ADC)
其中,ADC为采集到的当前电位器的值,target为目标位置转换后的电压值,沩周期次数,adcvalpre为上一周期的电压值,kp,ki,kd为选定的参数,选择合适的参数可以保证电机又快又稳的到达月标位置。
4、舵机驱动板以TWI方式与上位机通讯对舵机的控制
TWI(Two-wireSerialInterface)作为Atmega8L的一个通讯接口,提供最快400khz的数据传输率。IWI协议允许系统设计者只用两根双向传输线就可以将128个不同的设备互连到一起。这两根线一是时钟SCL,-是数据SDA。使用TWI方式通讯主要是可以精确的传输舵机要到达的指定位置以及方便地调节kp,ki,kd系数。本文采用两片Atmega8L单片机进行TWI通讯,PC机端采用RS-232与其中一片单片机通讯,模型如图5所示:

PC机端是一个用VC6写的串口通讯程序和单片机a通讯,单片机a主要是处理RS--232传输的数据并重新装包以TWI方式发送给舵机控制电路板。这样在实验过程中可以很方便的通过PC机端的串口通讯程序发送目标位置,kp,ki,kd等参数,容易调试。
本文选用FutabaS3003舵机的机械部件,用图4的舵机控制电路,很好的控制电机到达目标位置,而且产生了较大的扭矩。作为一个实验产品,达到了预期的效果,下一步寻求更好的调节算法,更稳定地控制电机,产生更大的扭矩。
上一篇:avr单片机使用注意点汇总
下一篇:关于低频数字式相位仪的设计方案
- 基于 Microchip AVR DA MCU 的带加热 HoD 离手检测+触摸多功能方向盘方案
- Microchip推出AVR® DU系列USB单片机,支持增强型代码保护和高达15W 的 功率输出
- 贸泽电子开售面向工业和汽车应用的Microchip Technology AVR64EA 8位AVR MCU
- AVR32 MCU上的ABDAC外设音频播放设计
- 使用AVR微控制器控制GSM模块实现发送和接收短信
- 如何使用USBASP烧写器和Atmel Studio 7.0对AVR微控制器进行编程
- 使用AVR微控制器Atmega16连接伺服电机的方法
- 使用AVR微控制器ATmega16的循迹机器人
- 了解Atmega16 / 32 AVR微控制器中的脉冲宽度调制(PWM)
- 如何使用AVR微控制器ATmega16连接霍尔传感器
-

RISC-V嵌入式系统开发
-

SOC系统级芯片设计实验
-

云龙51单片机实训视频教程(王云,字幕版)
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

PIC单片机控制的遥控防盗报警器电路
-

使用ESP8266从NTP服务器获取时间并在OLED显示器上显示
-

用NE555制作定时器
-

如何构建一个触摸传感器电路
-

基于ICL296的大电流开关稳压器电源电路
-

基于TDA2003的简单低功耗汽车立体声放大器电路