


STM32之CAN---配置波特率
2016-12-27 来源:eefocus
1 位时间特性
为了掌握如何设置STM32 CAN的波特率,首先我们得先了解一下位时间特性。
位时间特性逻辑通过采样来监视串行的CAN总线,并且通过跟帧起始位的边沿进行同步,及通过跟后面的边沿进行重新同步,来调整其采样点。
它的操作可以简单解释为,如下所述把名义上的每位的时间分为3段:
● 同步段(SYNC_SEG):通常期望位的变化发生在该时间段内。其值固定为1个时间单元(1 x tCAN)。
● 时间段1(BS1):定义采样点的位置。它包含CAN标准里的PROP_SEG和PHASE_SEG1。其值可以编程为1到16个时间单元,但也可以被自动延长,以补偿因为网络中不同节点的频率差异所造成的相位的正向漂移。
● 时间段2(BS2):定义发送点的位置。它代表CAN标准里的PHASE_SEG2。其值可以编程为1到8个时间单元,但也可以被自动缩短以补偿相位的负向漂移。
● 重新同步跳跃宽度(SJW):定义了在每位中可以延长或缩短多少个时间单元的上限。其值可以编程为1到4个时间单元。
● 有效跳变:被定义为,当bxCAN自己没有发送隐性位时,从显性位到隐性位的第1次转变。
如果在时间段1(BS1)而不是在同步段(SYNC_SEG)检测到有效跳变,那么BS1的时间就被延长最多SJW那么长,从而采样点被延迟了。相反如果在时间段2(BS2)而不是在SYNC_SEG检测到有效跳变,那么BS2的时间就被缩短最多SJW那么长,从而采样点被提前了。为了避免软件的编程错误,对位时间特性寄存器(CAN_BTR)的设置,只能在bxCAN处于初始化状态下进行。
注: 关于CAN位时间特性和重同步机制的详细信息,请参考ISO11898标准。
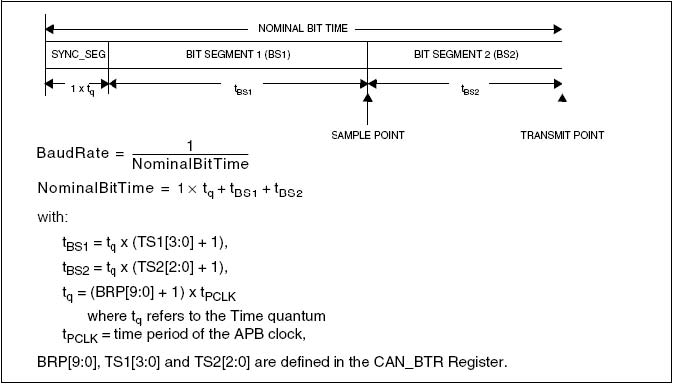
图1
特别注意上图下方的几个公式.可以得出的结论是:
CAN波特率=APB总线频率/BRP分频器/(1+tBS1+tBS2)
2 与CAN波特率有关的寄存器
CAN位时间特性寄存器 (CAN_BTR)
地址偏移量: 0x1C
复位值: 0x0123 0000
注: 当CAN处于初始化模式时,该寄存器只能由软件访问。
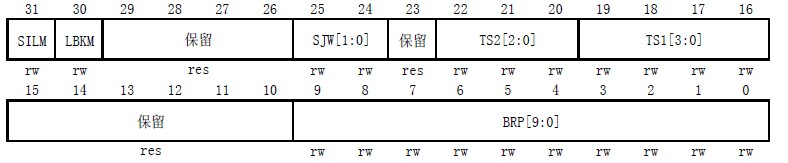
图2
| 位31 | SILM: 静默模式(用于调试) 0: 正常状态; 1: 静默模式。 |
| 位30 | LBKM: 环回模式(用于调试) 0: 禁止环回模式; 1: 允许环回模式。 |
| 位29:26 | 保留位,硬件强制为0。 |
| 位25:24 | SJW[1:0]: 重新同步跳跃宽度 为了重新同步,该位域定义了CAN硬件在每位中可以延长或缩短多少个时间单元的上限。 tRJW = tCAN x (SJW[1:0] + 1)。 |
| 位23 | 保留位,硬件强制为0。 |
| 位22:20 | TS2[2:0]: 时间段2 该位域定义了时间段2占用了多少个时间单元 tBS2 = tCAN x (TS2[2:0] + 1)。 |
| 位19:16 | TS1[3:0]: 时间段1 该位域定义了时间段1占用了多少个时间单元 tBS1 = tCAN x (TS1[3:0] + 1) |
| 位15:10 | 保留位,硬件强制其值为0。 |
| 位9:0 | BRP[9:0]: 波特率分频器 该位域定义了时间单元(tq)的时间长度 tq = (BRP[9:0]+1) x tPCLK |
3 如何在代码中配置波特率
配置波特率是在CAN模块初始化时配置,代码示例如下:
//CAN1 register init
CAN_DeInit(CAN1);
CAN_StructInit(&CAN_InitStructure);
//CAN cell init
CAN_InitStructure.CAN_TTCM = DISABLE;
CAN_InitStructure.CAN_ABOM = DISABLE;
CAN_InitStructure.CAN_AWUM = DISABLE;
CAN_InitStructure.CAN_NART = DISABLE;
CAN_InitStructure.CAN_RFLM = DISABLE;
CAN_InitStructure.CAN_TXFP = ENABLE;
CAN_InitStructure.CAN_Mode = CAN_Mode_Normal;
CAN_InitStructure.CAN_SJW = CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1 = CAN_BS1_6tq; //tBS1=6个tCAN时钟周期
CAN_InitStructure.CAN_BS2 = CAN_BS2_8tq; //tBS2=8个tCAN时钟周期
CAN_InitStructure.CAN_Prescaler = 4; //ABP总线时钟时钟4分频
//CANbps= Fpclk/((BRP+1)*((Tseg1+1)+(Tseg2+1)+1)
//所以这里CANbps=APB1总线频率30000000/4/(8+6+1))=500k bps
//总体配置方向: Tseg1>=Tseg2 Tseg2>=tq; Tseg2>=2TSJW
if (CAN_Init(CAN1,&CAN_InitStructure) == CANINITFAILED)
{
return _ERROR;
}
CAN_ITConfig(CAN1,CAN_IT_FMP0, ENABLE);//打开FMP0中断
总体配置保持tBS1>=tBS2 tBS2>=1个CAN时钟周期 tBS2>=2tSJW
-

RISC-V嵌入式系统开发
-

SOC系统级芯片设计实验
-

云龙51单片机实训视频教程(王云,字幕版)
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

离子检测器电路分析
-

非常简单的150W功放电路图
-

如何使用LED驱动器LM3915制作振动计
-

分享一个电网倾角计电路
-

使用NE555和磁簧开关的橱柜照明电路
-

电谐波图形均衡器示意图