


S3c2440ARM异常与中断体系详解2---CPU模式(Mode)状态(State)
2021-09-10 来源:eefocus
这节课我们来讲CPU的工作模式(Mode) 状态(State)寄存器
7种Mode:
usr(用户模式)
sys(系统模式)
undefined(und)(未定义模式)
Supervisor(svc)(管理者模式)
Abort(abt)(中止模式)
IRQ(irq)(中断模式)
FIQ(fiq)(快速中断模式)
2种State:
ARM state
Thumb state
寄存器:
通用寄存器
备份寄存器(banked register)
当前程序状态寄存器(Current Program Status Register);CPSR
CPSR的备份寄存器:SPSR(Save Program Status Register)
我们仍然以这个母亲为例讲解这个CPU模式
这个母亲无压力看书 –>(正常模式)
要考试,看书—>(兴奋模式)
生病—->(异常模式)
可以参考书籍 《ARM体系结构与编程》作者:杜春雷
对于ARM CPU有7种模式:
1 、usr :类比 正常模式
2 、sys :类比的话兴奋模式
3 、5种异常模式:(2440用户手册72页)
3.1 und :未定义模式
3.2 svc :管理模式
3.3 abt :中止模式: a 指令预取中止(读写某条错误的指令导致终止运行) b 数据访问终止 (读写某个地址, 这个过程出错) ,例如:都会进入终止模式
3.4 IRQ: 中断模式
3.5 FIQ: 快中断模式
我们可以称以下6种为特权模式
und :未定义模式
svc :管理模式
abt :终止模式
IRQ :中断模式
FIQ :快中断模式
sys :系统模式
usr用户模式(不可直接进入其他模式) ,特权模式可以编程操作CPSR直接进入其他模式

这个图是有关各个模式下能访问寄存器的,再讲这个图之前我们先引入 2种state
CPU有两种state:
1 ARM state:使用ARM指令集,每个指令4byte
2 Thumb state:使用的是Thumb指令集,每个指令2byte
比如同样是:
mov R0, R1 编译后
对于ARM指令集要占据4个字节:机器码
对于Thumb指令集占据2个字节:机器码
引入Thumb减少存储空间
ARM指令集与Thumb指令集的区别:
Thumb 指令可以看作是 ARM 指令压缩形式的子集,是针对代码密度的问题而提出的,它具有 16 位的代码密度但是它不如ARM指令的效率高 .
Thumb 不是一个完整的体系结构,不能指望处理只执行Thumb 指令而不支持 ARM 指令集.
因此,Thumb 指令只需要支持通用功能,必要时可以借助于完善的 ARM 指令集,比如,所有异常自动进入 ARM 状态.在编写 Thumb 指令时,先要使用伪指令 CODE16 声明,而且在 ARM 指令中要使用 BX指令跳转到 Thumb 指令,以切换处理器状态.编写 ARM 指令时,则可使用伪指令 CODE32声明.
下节课会演示使用Thumb指令集编译,看是否生成的bin文件会变小很多
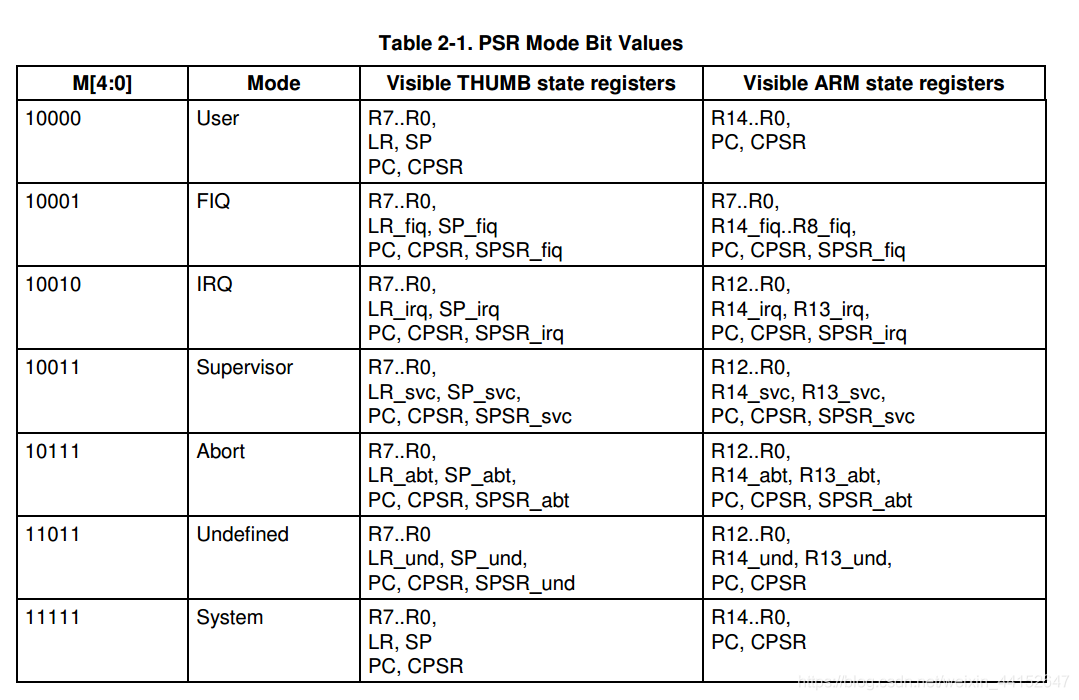
在每种模式下都有R0 ~ R15
在这张图注意到有些寄存器画有灰色的三角形,表示访问该模式下访问的专属寄存器
比如
mov R0, R8
mov R0, R8
在System 模式下访问的是R0 ~ R8,在所有模式下访问R0都是同一个寄存器
mov R0,R8_fiq
但是在FIQ模式下,访问R8是访问的FIQ模式专属的R8寄存器,不是同一个物理上的寄存器
在这五种异常模式中每个模式都有自己专属的R13 R14寄存器,R13用作SP(栈) R14用作LR(返回地址)
LR是用来保存发生异常时的指令地址
为什么快中断(FIQ)有那么多专属寄存器,这些寄存器称为备份寄存器
回顾一下中断的处理过程
1 保存现场(保存被中断模式的寄存器)
就比如说我们的程序正在系统模式/用户模式下运行,当你发生中断时,需要把R0 ~ R14这些寄存器全部保存下来,让后处理异常,最后恢复这些寄存器
但如果是快中断,那么我就不需要保存 系统/用户模式下的R8 ~ R12这几个寄存器,在FIQ模式下有自己专属的R8 ~ R12寄存器,省略保存寄存器的时间,加快处理速度
但是在Linux中并不会使用FIQ模式
2 处理
3 恢复现场
CRSR当前程序状态寄存器,这是一个特别重要的寄存器
SPSR保存的程序状态寄存器,他们格式如下:
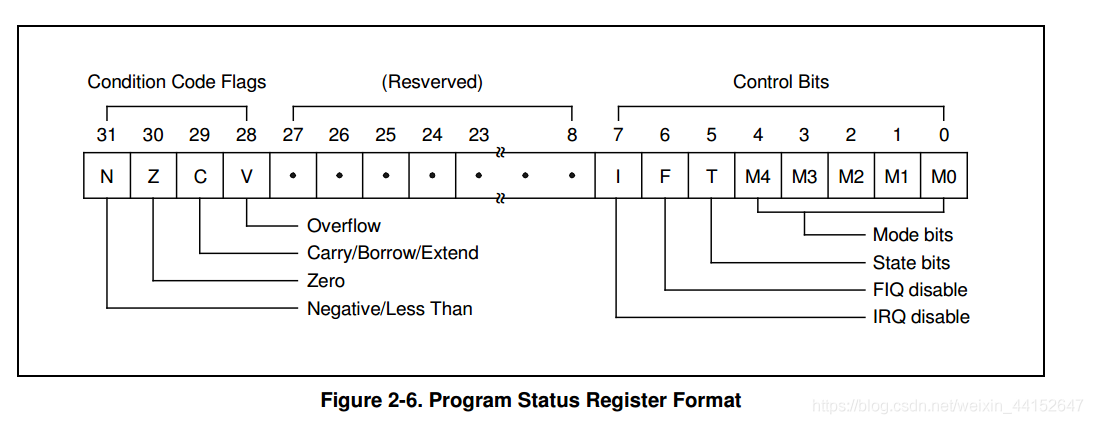
首先 M4 ~ M0 表示当前CPU处于哪一种模式(Mode);
我们可以读取这5位来判断CPU处于哪一种模式,也可以修改这一种模式位,让其修改这种模式;
假如你当前处于用户模式下,是没有权限修改这些位的;
M4 ~ M0对应什么值,会有说明
查看其他位
Bit5 State bits表示CPU工作与Thumb State还是ARM State用的指令集是什么
Bit6 FIQ disable当bit6等于1时,FIQ是不工作的
Bit7 IRQ disable当bit5等于1时,禁止所有的IRQ中断,这个位是IRQ的总开关
Bit8 ~ Bit27是保留位
Bite28 ~ Bit31是状态位,
什么是状态位,比如说执行一条指令
cmp R0, R1
如果R0 等于 R1 那么zero位等于1,这条指令影响 Z 位,如果R0 == R1,则Z = 1
beq跳转到xxx这条指令会判断Bit30是否为1,是1的话则跳转,不是1的话则不会跳转
使用 Z 位,如果 Z 位等于1 则跳转,这些指令是借助状态位实现的
SPSR保存的程序状态寄存器:
表示发生异常时这个寄存器会用来保存被中断的模式下他的CPSR
就比如我我的程序在系统模式下运行 CPSR是某个值,当发生中断时会进入irq模式,这个CPSR_irq就保存系统模式下的CPSR
我们来看看发生异常时CPU是如何协同工作的:
进入异常的处理流程(硬件)

我们来翻译一下:
发生异常时,我们的CPU会做什么事情
1把下一条指令的地址保存在LR寄存器里(某种异常模式的LR等于被中断的下一条指令的地址)
它有可能是PC + 4有可能是PC + 8,到底是那种取决于不同的情况
2 把CPSR保存在SPSR里面(某一种异常模式下SPSR里面的值等于CPSR)
3 修改CPSR的模式为进入异常模式(修改CPSR的M4 ~ M0进入异常模式)
4 跳到向量表
退出异常怎么做?
1、让LR减去某个值,让后赋值给PC(PC = 某个异常LR寄存器减去 offset)
减去什么值呢?
也就是我们怎么返回去继续执行原来的程序,根据下面这个表来取值

如果发生的是SWI可以把 R14_svc复制给PC
如果发生的是IRQ可以把R14_irq的值减去4赋值给PC
2、把CPSR的值恢复(CPSR 值等于 某一个一场模式下的SPSR)
3、清中断(如果是中断的话,对于其他异常不用设置)
-

RISC-V嵌入式系统开发
-

SOC系统级芯片设计实验
-

云龙51单片机实训视频教程(王云,字幕版)
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

光控电路设计与分析
-

IGBT模块通过控制门极阻断过电流
-

比较常见的功率整流器和滤波电路
-

基于M66T旋律发生器的电路图解析
-

基于CA3193的热电偶放大器电路
-

基于TDA1554的立体声放大器电路