


基于SVPWM以及实际MCU定时器输出脉冲的中心对齐模式
2024-08-19 来源:elecfans
一、扇区矢量切换点确定
模型按七段式的三相桥臂切换时间搭建,如I扇区内,确定逆变臂的开关顺序为七段000-100-110-111-111-110-100-000;

(第I扇区)
由于其为三角波调制,其定时中心对称、每个合成矢量的作用周期固定为Tpwm,则可定义:

(三相切换点)
同理在第Ⅱ扇区内,逆变桥臂的开关顺序为000-010-110-111-111-110-010-000:

(第2扇区)
在第Ⅲ扇区内,逆变桥臂的开关顺序为000-010-011-111-111-011-010-000:

(第3扇区)
在第Ⅳ扇区内,逆变桥臂的开关顺序为000-001-011-111-111-011-001-000:

(第4扇区)
在Ⅴ扇区内,逆变桥臂的开关顺序为000-001-101-111-111-101-001-000:
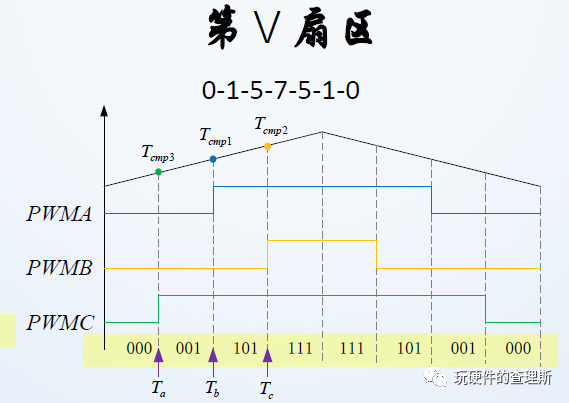
(第5扇区)
在Ⅵ扇区内,逆变桥臂的开关顺序为000-100-101-111-111-101-100-000:

(第6扇区)
三相电压开关比较切换点Tcmp1、Tcmp2、Tcmp3与各扇区的关系可列出如下表格方便查询:

(扇区切换表)
综上我们得到了各时刻所需的空间电压矢量及持续时间,实际应用中可在处理器中赋值对应通道的定时器,捕获比较寄存器产生PWM波形,控制逆变桥,进而产生期望的电压、电流、力矩。
二、基于simulink仿真建模
基于以上的分析,为了验证该算法是准确性,接下来我们就根据原理搭建相关模型:
搭建切换点定义模块如下,输入变量为过调制后的T1、T2及Tpwm;

(切换点定义)
搭建根据扇区自动选择相应的比较切换点模块如下,输入变量为扇区N及三相切换点Ta、Tb、Tc,此处我们需要留意,各扇区内三相切换点相对于的载波比较点并不一致,这与马鞍波密切相关;

(各扇区自动选择切换点模块)
搭建PWM互补输出模块,输入变量为三角载波与比较点,差值比较输出开关动作,由于此模型仅验证其原理,所以并没有依据实际应用加入死区时间;

(互补PWM输出模块)

(Spwm汇总模块)
综上就是SVPWM算法的实现方式,其中主要包括参考电压矢量的扇区判断、零/非零矢量用时间计算以及切换时间点确定,最后利用三角载波与切换点比较输出PWM。到这我们将SVPWM模块汇总到单个模块方便后续调用,后接的逆变桥与电机就直接使用simulink库自带的模型。
三、开环仿真运行验证
到这我们搭建开环SVPWM模型验证各项参数,将之前已经搭建的功能模块连接起来,逆变桥与电机选用simulink库自带模块。具体参数设置为:直流侧电压Udc =96 V,PWM开关频率16KHz,仿真算法采用变步长ode23 tb 算法,仿真步长设置为5e^-6,其余变量保持初始值不变。
仿真条件为:给定Ud、Uq值进行Park反变换为三相正弦,Clark正变换为α、β给到Svpwm模块。电机给定转速设定为600 r/ min ,初始时刻负载转矩0.1N•m 。

(开环总体框架)

(逆变桥模块)

(电机模块)
设定Ud为0,Uq=24V,仿真运行首先我们看切换点前后的马鞍波,从仿真波形来看到其实马鞍波的来源是三相切换点时间的组合值,当然网上很多资料推测是三相正弦叠加而来这个说法是有待商榷的。


(切换点前后马鞍波)
根据仿真我们可以得出结论:其实马鞍波是SVPWM算法的特点,计算得到的三相切换点时间波形就是如此,只是经过了不同扇区的组合,才形成了马鞍波,并不存在三次谐波。
如下为电机转速波形,开环的效果比较理想,虽然启动时有较大的超调量,但是转速很快就能稳定在600转,但由于没有引入闭环控制,所以还是有轻微的波动。

(转速)

(Ud、Uq、角速度给定值)

(Id、Iq反馈值)
***四、七段式与五段式对比 ***
在SVPWM 方案中有基于软件模式(七段式算法)和硬件模式(五段式算法),其中零矢量的穿插是最具灵活性的。
五段式每个Tpwm仅在中间段插入零矢量,每个周期相比七段式减少了1/3的开关次数,减缓了开关器件在负载电流较大时开关动作损耗。
对于七段式SVPWM 算法而言,基本矢量作用顺序为:在每次开关状态转换时,只改变其中一相的开关状态,且零矢量在时间上平均分配,产生的PWM 对称,还能够降低PWM的谐波分量。

(七段式三相驱动)

(五段式三相驱动)

(七段式相电流)

(五段式相电流)

(七段式谐波含量)

(五段式谐波含量)
从仿真数据中我们可以明显对比出,五段式的驱动波形在每个扇区总有一相的开关管不动作得以休息,相比七段式可减少1/3的开关损耗。
但由于扇区间的衔接是不对称的,所以相电流的波形相比七段式波动更明显,从频谱分析中我们也明显可以对比出,七段式的3次谐波含量为3.45%,而五段式的3次谐波含量为4.12%。
从开环模型的仿真结果来看,五段式算法切合实际的应用,七段式的算法受限于开关元件的性能但有利于更理想的电机运转,可以按应用场景进行选择。
** 总结** :本次开环仿真也是基于最基本的Svpwm算法搭建,所用的参数及模型均为理想值,对于实际应用仅作为参考价值。
上一篇:SVPWM控算法的坐标变换
下一篇:不稳定的零极点为何不能对消?
-

PX4固件二次开发课程
-

RISC-V嵌入式系统开发
-

NuttX Workshop 2024
-

自己动手写操作系统
-

SOC系统级芯片设计实验
-

自己动手做一台计算机
-

PIC单片机控制的遥控防盗报警器电路
-

红外线探测报警器
-

用NE555制作定时器
-

带有短路保护系统的5V直流稳压电源电路图
-

如何构建一个触摸传感器电路
-

基于TDA2003的简单低功耗汽车立体声放大器电路