C2000 Piccolo系列MCU芯片内部一般都集成了1-2个硬件SCI (UART) 。有时出于成本或者Layout面积的考虑,只能选择小封装或资源较少的型号,那么就会出现硬件SCI不够用的情况。这时便可使用GPIO软件模拟成SCI接口。
本文给出了使用外部中断和CPU定时器将GPIO模拟成SCI接口的方法和例程。
一、测试相关环境
测试相关的软硬件环境如下表所示:
|
CCS Version |
6.2.0.00050 |
|
Compiler Version |
TI v15.12.3.LTS |
|
V3.4.9 |
|
测试芯片型号 |
|
|
硬件环境 |
|
|
GPIO引脚使用 |
TX: GPIO33 RX: GPIO0 |
|
硬件资源使用 |
CPU_Timer0, XINT3 |
您可以选择任意示例工程,这里选择的工程为timed_led_blink,它的工程文件的目录为:
C:\ti\controlSUITE\device_support\f2806x\v151\F2806x_examples_ccsv5\timed_led_blink
在CCS中import该工程后,将Example_2806xLEDBlink.c替换为本文提供的源码即可。
二、 功能描述
SCI (Serial Communications Interface, 串行通信接口) 是一种双线异步串行接口,通常也被称为UART。SCI提供了与一些常用外设的通信接口。SCI的数据帧格式,如图1所示,通常由以下部分组成:
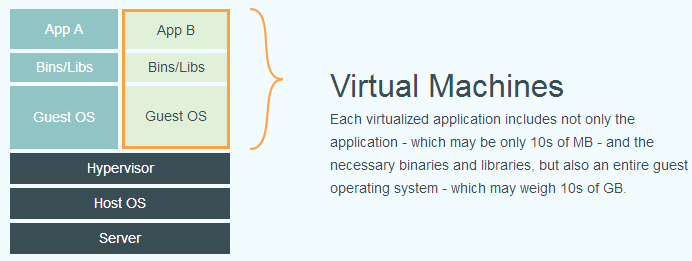
图1 SCI数据帧格式
1. 发送程序框图和发送状态机
发送使能后,CPU定时器打开,每隔8.67us(115200 bps)产生一次中断,在定时器中断发生时改变引脚的输出电平实现数据发送。第一个定时器中断时,发送引脚电平置低,标志数据发送开始。之后以小端模式从低位到高位依次发送数据位、校验位。采用奇校验时,数据按位异或的结果和校验位的异或结果应为1;采用偶校验时,数据按位异或的结果和校验位的异或结果应为0。传输结束后,发送引脚输出一位高电平,标志发送结束。
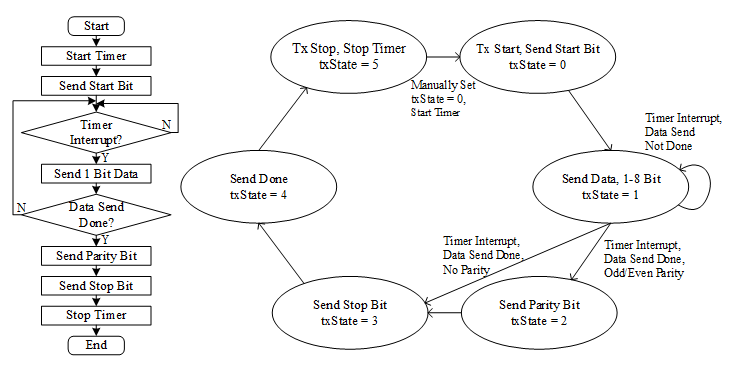
图2发送程序框图和发送状态机
2. 接收程序框图和接收状态机
接收使能后,开启外部中断。SCI接收引脚在空闲状态下处于高电平,接收数据的起始位为低电平。由于数据到来时间的不确定,故采用外部中断下降沿触发的方式检测数据传输的起始位。外部中断检测到下降沿后,标志数据传输开始。此时先延时4us,等待信号电平稳定,然后关闭外部中断,打开定时器。与发送相同,定时器每8.67us产生一次中断。每次中断产生时,对接收引脚的电平进行采样,依次接收数据位、校验位和停止位。当所有数据接收完成后,关闭定时器,等待接收下次使能。
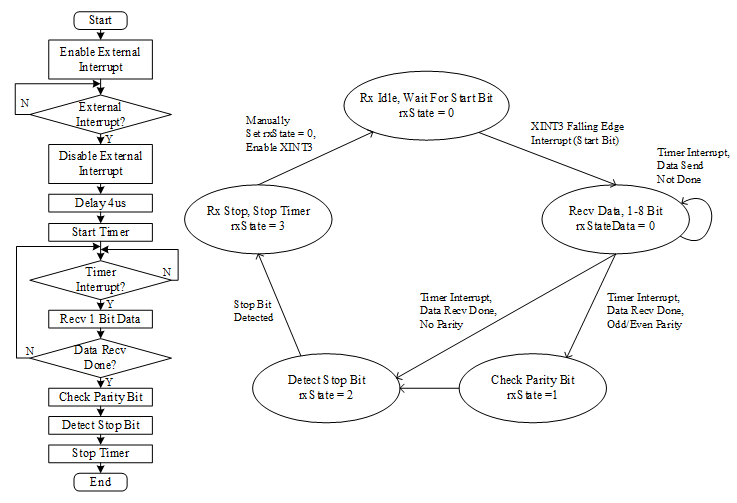
图3接收程序框图和接收状态机
3. 功能描述
波特率: 115200 bps (可调), 停止位:1 bit,数据位:1-8 bit,校验位:无校验、奇校验或偶校验。可根据实际需求在宏定义中修改recvBuffLen确定接收缓冲区大小:
以接收缓冲区大小为800 Bytes为例,每当程序从GPIO0接收满800 Bytes数据后,就会把全部接收到的数据通过GPIO32发出。
三、API
1. 宏定义
parity:校验位。可设置为0:无校验,1:奇校验,2:偶校验。
dataLength:数据位长度,可配置为1-8比特。
recvBuffLen:接收缓冲区大小,通常可设置为数据包长度。
2. 全局变量
swSciMode:定义软件串口模式。为节省硬件资源,采用半双工模式。0为接收模式,1为发送模式。
rxData:从GPIO接收到的单字节数据。
rxState:接收程序状态机状态,0-3为有效状态,详见图3。
rxError:接收错误指示标志,在调用接收相关API后值会相应改变,需手动清零。具体定义如下:
|
0x00 |
0x01 |
0x02 |
0x03 |
|
接收正常 |
校验错误 |
未检测到停止位 |
停止位+校验位错误 |
txData:从GPIO发送到的单字节数据。
txState:发送程序状态机状态,0-5为有效状态,详见图2。
3. 函数
|
函数名称 |
功能描述 |
|
Uint16 sw_sci_recv_byte(void) |
返回GPIO0接收到的单字节数据。 |
|
void sw_sci_recv_bytes(Uint16*dataBuff, Uint16 len) |
从GPIO0接收len个字节数据存入缓冲区dataBuff中。 |
|
void sw_sci_send_byte(Uint16 data); |
使用GPIO33发送单字节数据。 |
|
void sw_sci_send_bytes(Uint16* dataBuff, Uint16 len) |
使用GPIO33发送dataBuff中len个连续字节数据。 |
|
void sw_sci_send_string(char* txString); |
使用GPIO33发送字符串txString。txString必须以\0结尾,方便用户调试使用。 |
四、测试
1. 波特率及CPU负载测试
为测试软件SCI的性能,本例程额外使用了GPIO32作为测试引脚用于指示程序状态。当程序进入软件SCI定时器中断时,GPIO32输出高电平;其余时间GPIO32输出低电平。图4为8位数据位、1位奇校验、1位停止位、115200波特率下,发送0x55时TX引脚(蓝线)和测试引脚(黄线)的波形。从图中可以看出,实际发送波特率为116280bps,误差0.9%。测试引脚的高电平持续时间和,即为软件SCI发送单字节数据占用CPU的时间。经过测量,测试引脚高电平共持续10.32us,单字节理论发送时间为95.49us,故发送时CPU负载为10.8%。
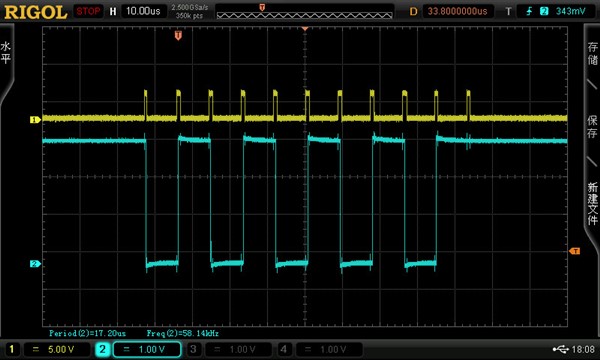
图4软件串口例程发送测试
图5为8位数据位、1位奇校验、1位停止位、115200波特率下,接收0x55时RX引脚(蓝线)和测试引脚(黄线)的波形。经过测量,测试引脚高电平共持续7.2us,单字节理论接收时间为95.49us,故接收时CPU负载为7.5%。

图5软件串口例程接收测试
在没有示波器的情况下也可使用C2000 MCU内部的eCAP测量实际发送波特率和CPU负载。
2. 数据收发测试
软件串口例程配置为115200波特率、8bit数据位、1停止位、奇校验,PC端串口助手采用相同配置时,数据可以正常收发:
图6正常数据收发
将串口助手软件改为偶校验,例程提示校验位错误:
图7校验位检错
软件串口例程配置为无校验位,串口助手采用奇校验时,例程实际在接收结束位时接收到的是校验位,此时例程提示结束位错误:

图8停止位检错
例程和串口助手采用相同配置时,以5Hz频率发送800 Bytes数据包,收发正常:
图9连续收发测试
五、注意事项
1. 改变通信波特率可通过调整CPU定时器的分频系数实现。
理论分频系数 = 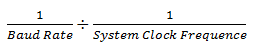
以LAUNCHXL-F28069M 为例,LAUNCHXL-F28069M主频为90 MHz。理论分频系数应为:

实际使用时由于系统时钟会有误差,推荐使用示波器测量实际输出波特率对分频系数进行调整。
2. TX引脚可根据需求更改至任意引脚。RX引脚需要通过外部中断下降沿判断数据起始位,所以只能在GPIO0-GPIO31中进行选择。
3. 为节省硬件资源,接收和发送程序使用同一CPU定时器,所以仅能进行半双工通信。若想实现全双工通信可再多使用一个定时器将发送和接收分开。
六、待办事项
1. 增加使用eCAP测量波特率和CPU负载功能。
2. 增加波特率自动校正功能。
Reference
[1] TMS320x2806x Piccolo Technical Reference Manual (spruh18g).
[2] ControlSUITE中cpu_timer和external_interrupt例程。



 京公网安备 11010802033920号
京公网安备 11010802033920号
