引言
作为工程师,每天接触的是电源的设计工程师,发现不管是电源的老手,高手,新手,几乎对控制环路的设计一筹莫展,基本上靠实验.靠实验当然是可以的,但出问题时往往无从下手,在这里我想以反激电源为例子(在所有拓扑中环路是最难的,由于RHZ 的存在),大概说一下怎么计算,至少使大家在有问题时能从理论上分析出解决问题的思路.
一:一些基本知识,零,极点的概念
示意图:



这里给出了右半平面零点的原理表示,这对用Pspice 做仿真很有用,可以直接套用此图.

递函数自己写吧,正好锻炼一下,把输出电压除以输入电压就是传递函数.
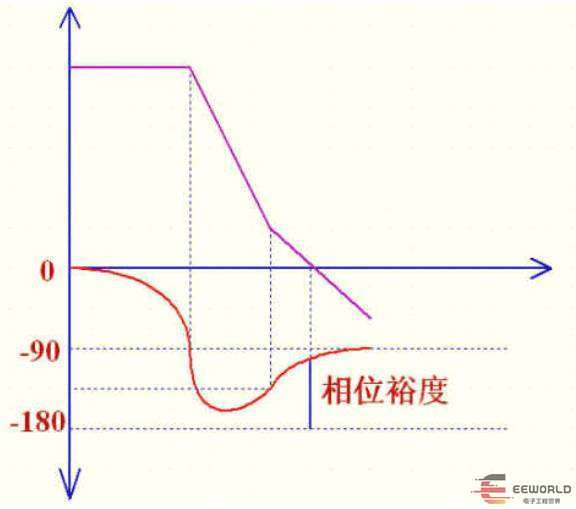
bode 图可以简单的判定电路的稳定性,甚至可以确定电路的闭环响应,就向我下面的图中表示的.零,极点说明了增益和相位的变化。
二:
单极点补偿,适用于电流型控制和工作在DCM 方式并且滤波电容的ESR 零点频率较低的电源.其主要作用原理是把控制带宽拉低,在功率部分或加有其他补偿的部分的相位达到180 度以前使其增益降到0dB. 也叫主极点补偿.

双极点,单零点补偿,适用于功率部分只有一个极点的补偿.如:所有电流型控制和非连续方式电压型控制.

三极点,双零点补偿.适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑。

C1 的主要作用是和R2 提升相位的.当然提高了低频增益.在保证稳定的情况下是越小越好.
C2 增加了一个高频极点,降低开关躁声干扰.
串联C1 实质是增加一个零点,零点的作用是减小峰值时间,使系统响应加快,并且死循环越接近虚轴,这种效果越好.所以理论上讲,C1 是越大越好.但要考虑,超调量和调节时间,因为零点越距离虚轴越近,死循环零点修正系数Q 越大,而Q 与超调量和调节时间成正比,所以又不能大.总之,考虑死循环零点要折衷考虑.
并联C2 实质是增加一个极点,极点的作用是增大峰值时间,使系统响应变慢.所以理论上讲,C2也是越大越好.但要考虑到,当零极点彼此接近时,系统响应速度相互抵消.从这一点就可以说明,我们要及时响应的系统C1 大,至少比C2 大。
三:环路稳定的标准.
只要在增益为1 时(0dB)整个环路的相移小于360 度,环路就是稳定的.
但如果相移接近360 度,会产生两个问题:1)相移可能因为温度,负载及分布参数的变化而达到360 度而产生震荡;2)接近360 度,电源的阶跃响应(瞬时加减载)表现为强烈震荡,使输出达到稳定的时间加长,超调量增加.如下图所示具体关系.


所以环路要留一定的相位裕量,如图Q=1时输出是表现最好的,所以相位裕量的最佳值为52度左右,工程上一般取45度以上.如下图所示:
这里要注意一点,就是补偿放大器工作在负反馈状态,本身就有180度相移,所以留给功率部分和补偿网络的只有180度.幅值裕度不管用上面哪种补偿方式都是自动满足的,所以设计时一般不用特别考虑.由于增益曲线为-20dB/decade时,此曲线引起的最大相移为90度,尚有90度裕量,所以一般最后合成的整个增益曲线应该为-20dB/decade部分穿过0dB.在低于0dB带宽后,曲线最好为-40dB/decade,这样增益会迅速上升,低频部分增益很高,使电源输出的直流部分误差非常小,既电源有很好的负载和线路调整率.
四,如何设计控制环路?
经常主电路是根据应用要求设计的,设计时一般不会提前考虑控制环路的设计.我们的前提就是假设主功率部分已经全部设计完成,然后来探讨环路设计.环路设计一般由下面几过程组成:
1)画出已知部分的频响曲线.
2)根据实际要求和各限制条件确定带宽频率,既增益曲线的0dB频率.
3)根据步骤2)确定的带宽频率决定补偿放大器的类型和各频率点.使带宽处的曲线斜率为20dB/decade,画出整个电路的频响曲线.
上述过程也可利用相关软件来设计:如pspice,POWER-4-5-6.一些解释:

已知部分的频响曲线是指除Kea(补偿放大器)外的所有部分的乘积,在波得图上是相加.
环路带宽当然希望越高越好,但受到几方面的限制:a)香农采样定理决定了不可能大于1/2Fs;b)右半平面零点(RHZ)的影响,RHZ随输入电压,负载,电感量大小而变化,几乎无法补偿,我们只有把带宽设计的远离它,一般取其1/4-1/5;c)补偿放大器的带宽不是无穷大,当把环路带宽设的很高时会受到补偿放大器无法提供增益的限制,及电容零点受温度影响等.所以一般实际带宽取开关频率的1/6-1/10。
五,反激设计实例
fo为LC谐振频率,注意Q值并不是用的计算值,而是经验值,这个经验值问题的关键
内容非常实用,收藏保存了,有空详细阅读,谢谢分享



 京公网安备 11010802033920号
京公网安备 11010802033920号
