



历史上的今天
今天是:2025年07月30日(星期三)
2018年07月30日 | PIC单片机入门_指令系统
2018-07-30 来源:eefocus
1.前文回顾
前面学习了PIC单片机的系统框架,也介绍了程序存储器、数据存储器的组织形式。这里需要补充一点的就是寻址方式,之前仅仅提到了立即数寻址、直接寻址。其实还有几个比较重要的寻址方式,PC相对寻址&间接寻址!
1.1 PC相对寻址
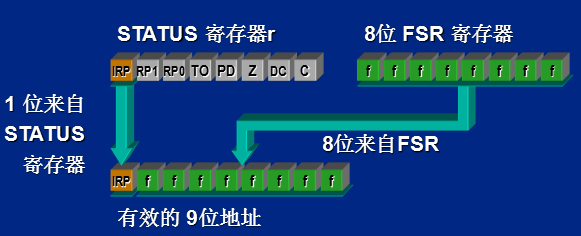
1.2 间接寻址
用FSR寄存器作为8位地址指针;另外1位在STATUS中描述。
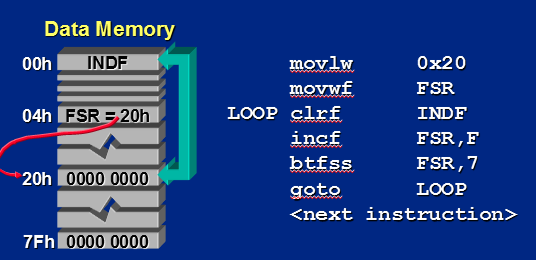
例如:清除 0x20 to 0x7F的RAM
注意:FSR 和 INDF 用于间接寻址,FSR 是地址指针;INDF 保存移动的值。

2.PIC16F877A单片机常用指令系统
PIC16F877A单片机共有35条指令,这些指令很容易学习、指令系统也很紧凑,并且是向上兼容的。
2.1 PICmicro指令集 汇总
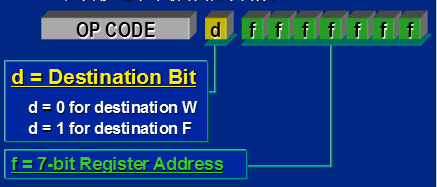
14位内核之字节操作指令构成:
PIC系列微控制器汇编语言指令与MCS-51系列单片机汇编语言一样,每条汇编语言指令由4个部分组成,其书写格式如下:
标号 操作码助记符 操作数1,操作数2 ;注释
指令的4个部分之间由空格作隔离符,空格可以是1格或多格,以保证交叉汇编时,PC机能识别指令。
标号 与MCS-51系列单片机功能相同,标号代表指令的符号地址。在程序汇编时,已赋以指令存储器地址的具体数值。汇编语言中采用符号地址(即标号)是便于查看、修改,尤其是便于指令转移地址的表示。标号是指令格式中的可选项,只有在被其它语句引用时才需派上标号。在无标号的情况下,指令助记符前面必须保留一个或一个以上的空格再写指令助记符。指令助记符不能占用标号的位置,否则该助记符会被汇编程序作标号误处理。
操作码助记符 该字段是指令的必选项。该项可以是指令助记符,也可以由伪指令及宏命令组成,其作用是在交叉汇编时,“指令操作码助记符”与“操作码表”进行逐一比较,找出其相应的机器码一一代之。
操作数 由操作数的数据值或以符号表示的数据或地址值组成。若操作数有两个,则两个操作数之间用逗号(,)分开。当操作数是常数时,常数可以是二进制、八进制、十进制或十六进制数。还可以是被定义过的标号、字符串和ASCⅡ码等。具体表示时,规定在二进制数前冠以字母“B”,例如B10011100;八进制数前冠以字母“O”,例如O257;十进制数前冠以字母“D”,例如D122;十六进制数前冠以“H”,例如H2F。在这里PIC 8位单片机默认进制是十六进制,在十六进制数之前加上Ox,如H2F可以写成Ox2F。指令的操作数项也是可选项。2.1 清零指令4条
1 寄存器清零指令
实例:CLRW ;寄存器W被清零
说明:该条指令很简单,其中W为PIC单片机的工作寄存器,相当于MCS-51系列单片机中的累加器A,CLR是英语Clear的缩写字母。
2 看门狗定时器清零指令。
实例:CLRWDT ;看门狗定时器清零(若已赋值,同时清预分频器)
说明:WDT是英语Watchdog Timer的缩写字母。CLR见上述说明。注意该两条指令无操作数。
3 寄存器f清零指令。指令格式:CLRF f
实例:CLRF TMRO ;对TMRO清零
说明:在PIC系列8位单片机中,常用符号F(或f)代表片内的各种寄程器和F的序号地址。F取值按PIC系列不同型号而不同,一般为Ox00~Ox1F/7F/FF。TMRO代表定时器/计数器TMRO,所以CLRF对寄程器清零,采用了直接寻址方式直接给出要访问的寄存器TMRO。
4 位清零指令。指令格式 BCF f,b
实例:BCF REG1,2 ; 把寄存器REG1的D2位清零
说明:BCF是英语Bit Clear F的缩写。指令格式中的F,同上说明;符号b是表示PIC片内某个8位数据寄存器F的位号(或位地址),所以b的取值为0~7或D0~D7。实例中REG是Register的缩写。实例中的2代表指令格式中的b=2即寄存器REG1的D2位。2.2 面向字节、常数与控制操作的指令12条
1 传送立即数至工作寄存器W指令
指令格式:MOVLW k ;k表示常数、立即数和标号
说明:MOVLW是Move Literal to w的缩写
实例:MOVL 0x1E ;常数30送W
2 I/O口控制寄存器TRIS设置指令
指令格式:TRIS f
说明:TRIS f是Load TRIS Register的缩写。其功能是把工作寄存器W的内容送入I/O口控制寄存器f。当W=0时,置对应I/O口为输出;W=1,置I/O口为输入。
实例:MOVLW 0x00 ;把00H送入W
TRIS RA ;置PIC RA口为输出
MOVLW 0xFF ;把FFH送入W
TRIS RB ;置PIC RB口为输入
说明:这是PIC汇编语言中常用的几条指令,即设置某个I/O口(这里是RA口和RB口)为输入或输出的语句。
3 W寄存器内容送寄存器f(W内容保持不变)指令
指令格式:MOVWF f
说明:MOVWF是Move W to f的缩写
实例:MOVLW 0x0B ;送0BH送W
MOVWF 6 ;送W内容到RB口
说明:第一条指令0x0B(常数11)送工作寄存器W,第二条指令,把W内容常数11送到寄存器F6中,查表F6即为RB口,所以PORT_B(B口)=0BH=D11。4 寄存器f传送指令
指令格式:MOVF f,d
说明:MOVF是Move f的缩写。F代表PIC中的某个寄存器。指令中的d规定:d=0时,f内容送W;d=1时,f内容送寄存器。
实例:MOVF 6,0 ;RB口(F6)内容送W
MOVWF 8 ;RB口内容送f8
说明:第一条指令中的6代表寄存器f=6,查寄存器表f=6为RB口;0代表d=0,代表选择的目标为寄存器W。第二条指令中的8代表寄存器f=8。所以两条指令结果是把RB口的内容送f8。至于f8内容是多少?还应在汇编语言开始时附加指令,这里从略。
5 空操作指令
指令格式:NOP
说明:NOP是英语No Operation的缩写。NOP无操作数,所以称为空操作。执行NOP指令只使程序计数器PC加1,所以占用一个机器周期。
实例:MOVLW 0xOF ;送OFH到W
MOVWF PORT_B ;W内容写入B口
NOP ;空操作
MOVF PORT_B,W ;读操作
说明:该三条指令是一种对I/O口的B口连续操作的实例,其目的达到写入B口的内容要读出时,应保证写、读之间有个稳定时间,因此加入了空操作指令NOP。
6 无条件跳转指令
指令格式:GOTO k
说明:执行该条指令时,将指令转移到指定的地址(跳转)。指令中的k,常与程序中的标号联系起来
7 寄存器内容减1,结果为零的间跳指令
指令格式:DECFSZ f,d
说明:DECFSZ是英语Decrement f,Skip of not 0的缩写。符号f,d代表的意义,前述已作说明。该条指令是指寄存器的内容减1存入W(d=0)或f(d=1)中。若指令执行结果减1不为零,指令顺序执行;为零时,就间跳下一条指令后再执行(等效顺序执行一条空指令NOP),实际指令中,当d=1时,该项常被略去。
8 寄存器内容加1,结果为零间跳指令
指令格式:INCFSZ f,d
说明:INCFSZ是英语Increment f,Skip of 0的缩写。该条指令与上一条(7)指令差别仅在于“1”上,即执行这条指令时,寄存器f内容加1,若结果不为零,则指令顺序执行;为零则指令间跳执行。执行这条指令的其它逻辑关系与上条相同。9 子程序返回指令
指令格式:RETLW k
说明:RETLW是Return Literal to W的缩写。该指令代表子程序返回,返回前先把8位立即数送W。
实例:PIC某个汇编语言的延时子程序(摘要):
(1) BELY MOVLW 0xC5 ;送延时常数0C5H入W
(2) MOVWF COUNT2 ;0C5H送入计数器2
(3) CLRF COUNT1 ;对计数器1清零
(4) LOOP INCFSZ COUNT1 ;计数器1加1计数器1加1结果不为零,跳转循环
(5) GOTO LOOP
(6) DECTSZ CPUNT2 ;计数2减1计数器2减1结果不为零,跳转循环重复执行第4条指令
(7) GOTO LOOP
(8) RETLW 0 ;子程序执行结束返回
补充说明:1 当执行第(4)条加1指令结果为零时,就间跳转到执行第(6)条指令。
2 当执行第(6)条减1指令结果为零时,就间跳转到第(8)条子程序返回,整个延时指令才算完成。
3 计数器1或2代表PIC中某个寄存器,该寄存器由程序开始的伪指令赋值决定(关于伪指令今后将作专门介绍)。
10 寄存器半字节交换指令
指令格式:SWAPF f,d
说明:SWAPF是Swap f的合写。符号f、d的意义与前述的相同。该条指令的功能是寄存器f的高4位与低4位交换,即指令执行前,若寄存器f的8位状态为D7、D6、D5、D4、D3、D2、D1、D0,执行后的8位状态变为D3、D2、D1、D0、D7、D6、D5、D4,其结果存入W(d=0)或f(d=1)中。
实例:中断现场保护是中断技术中重要部分。由于PIC16C××指令系统中没有进栈PUSH和出栈POP指令,所以只能用其它指令来实现。因为在主程序中常常用到工作寄存器W和状态寄存器STATUS,所以中断现场保护常要保护寄存器W和STATUS。
下面是对PIC16C7×系列芯片中断现场保护的实例程序。
MOVWF W_TEMP ;将W内容存入到临时寄存器W_TEMP中
SWAPF STATUS,W ;交换STATUS与W内容
MOVWF STATUS_TEMP ;将STATUS的内容存入到临时寄存器STATUS_TEMP中
***************中断服务程序
***************
SWAPF STATUS_TEMP,W ;交换STATUS_TEMP与W的内容
MOVWF STATUS ;STATUS复原成原来的状态
SWAPF W_TEMP,F ;交换内容
SWAPF W_TEMP,W ;W复原成原来的状态
说明:上述程序中各条指令的注释基本上都是以程序应达到的目的而注释的,对每条指令的功能几乎未涉及。这是初学者应特别注意的。
11 子程序调用指令(Subroutine Call)
指令格式:CALL k ;k为立即地址
说明:子程序调用,不同型号芯片的实现方法不尽相同,其共同点是首先将返回地址((PC)+1)压栈保护,再转入所调用的子程序入口地址执行(与MCS-51指令功能相似)。
指令格式模式:HERE CALL DELAY;调用延时子程序
DELAY MOVLW 0x80 ;延时子程序
RETLW 0
说明:调用指令执行前,PC=地址HERE
调用指令执行后,PC=地址DELAY(标号),堆栈指针TOS=HERE+1(返回地址)。
12 寄存器内容取反指令
指令格式:COMF f,d
说明:COMF是Complement f的缩写。其中d=1时,操作(f)→f;d=0时,操作(f)→w。
功能:寄存器f内容取反后送入W(d=0)或f自身(d=1)。
实例: ORG 0x1FF
GOTO MAINORG 0
DELAY …
MAIN MOVLW 0 ;主程序开始
TRTS 5 ;设置RA口为输出
BCF 5,0 ;置RA口0位为0
LOOP CALL DELAY ;闪动延时
COMF 5 ;RA口求反(亮—灭—亮……控制)
GOTO LOOP ;循环…
说明:上述指令是一种PIC16C54 LED发光控制实验部分程序。其中延时子程序DELY未列出,但不影响本条指令的识读。程序中的主程序开始的三条指令,均已介绍过,紧跟着的CALL指令是调用执行子程序,其入口地址为标号DELAY。子程序执行结束后,又执行COMF 5的LED发光亮—灭…亮—灭……控制指令。后面一条GOTO LOOP指令是达到LED循环点亮目的。2.3 面向位的操作指令3条
该类指令除一条位清零外,另有一条寄存器f位b的置1指令和另外两条位跳步指令(PIC高级产品多增一条f的b位触发转换指令)。
(1)位置1指令。指令格式 BSF f,b
说明:BSF是Bit Set f的缩写。f和b的意义与前述相同,该条指令的功能是将寄存器f的b位置1。
(2)位测试、为零间跳指令。指令格式 BTFSC f,b
说明:BTFSC是Bit Test,Skip if Clear的缩写。指令功能是测试寄存器f位“b”,如为0,跳过下一条指令;为1顺序执行,即当f(b)=0时,就不执行当前指令而执行下一条指令(间跳),即用一条空指令NOP代替它,所以该条指令占用2个指令周期。
(3)位测试、为1间跳指令。指令格式 BTFSS f,b
说明:BTFSS是Bit Test,Skip if Set的缩写。其指令的逻辑功能与上条相反,位测试f(b)=1就间跳执行,f(b)=0顺序执行。

上一篇:PIC单片机入门_中断系统详解
史海拾趣
|
一、TPMS技术及其轮胎定位原理 TPMS原理及功能简介:TPMS是汽车轮胎压力检测系统,即“Tire Pressure Monitoring System”的英文缩写。主要用于在汽车行驶时,适时地对轮胎气压进行自动监测,对轮胎漏气造成低胎压和高温高胎压防爆胎进行预 ...… 查看全部问答> |
|
ce下如何直接访问蓝牙栈的L2CAP层,这个问题好像一直没有人回答哦~~ 通过socket只能建立模拟串口的链接。我希望能直接获取l2cap层的数据,在l2cap层进行蓝牙数据收发。 看msdn上的文档好像要自己扩展ce的蓝牙栈,但是这个好像是要固化到编译好的bin文件里的驱动模块。 如何设计一个正常的安装程序进行l2cap层数据 ...… 查看全部问答> |
|
最近在做一个双电源的51系统,是用来控制一个机器人的,电机比较多. 第一次做板,而且制板费昂贵,还是处于学生阶段的小弟希望以小心为上.. 我用的软件是Altium Designer 6.9 1.滴泪是为了防止在转孔时导线和焊接盘断裂,那么是否一定要加滴泪呢? 2. ...… 查看全部问答> |
|
SD卡问题:同样的卡在经过多次Suspend/Resume后存储管理部分读到不同的ID值 如题,在使用同样一张卡,并且在操作过程中卡始终是在设备中的。 在多次Suspend/Resume之后发现会出现通过IOCTL_DISK_GET_STORAGEID读到的ID和之前的不同。 那位曾经遇到过这类问题。… 查看全部问答> |
|
用Visual Studio2008 新建了一个智能设备中的MFC智能设备应用程序。跟EVC建立的MFC应用程序比较了一下,发现vs2008的代码模板好麻烦啊,而且好像不是消息处理机制了,那么在EVC上使用的代码能在VS2008运行吗?现在的教材都是在EVC上开发的,一用vs2 ...… 查看全部问答> |