



历史上的今天
今天是:2024年08月31日(星期六)
2018年08月31日 | STM32上使用UCOSII--软件定时器和任务延时
2018-08-31 来源:eefocus
一、软件定时器
UCOSII 从 V2.83 版本以后,加入了软件定时器,这使得UCOSII的功能更加完善,在其上的应用程序开发与移植也更加方便。在实时操作系统中一个好的软件定时器实现要求有较高的精度、较小的处理器开销,且占用较少的存储器资源。
UCOSII 通过 OSTimTick函数对时钟节拍进行加1操作,同时遍历任务控制块,以判断任务延时是否到时。软件定时器同样由OSTimTick提供时钟,但是软件定时器的时钟还受OS_TMR_CFG_TICKS_PER_SEC 设置的控制,也就是在UCOSII的时钟节拍上面再做了一次“分频”,软件定时器的最快时钟节拍就等于 UCOSII 的系统时钟节拍。这也决定了软件定时器的精度。
软件定时器定义了一个单独的计数器OSTmrTime,用于软件定时器的计时,UCOSII并不在OSTimTick 中进行软件定时器的到时判断与处理,而是创建了一个高于应用程序中所有其他任务优先级的定时器管理任务 OSTmr_Task,在这个任务中进行定时器的到时判断和处理。时钟节拍函数通过信号量给这个高优先级任务发信号。这种方法缩短了中断服务程序的执行时间,但也使得定时器到时处理函数的响应受到中断退出时恢复现场和任务切换的影响。软件定时器功能实现代码存放在 tmr.c文件中,移植时需只需在os_cfg.h文件中使能定时器和设定定时器的相关参数。
UCOSII 软件定时器实现了 3 类链表的维护:
OS_EXT OS_TMR OSTmrTbl[OS_TMR_CFG_MAX]; //定时器控制块数组
OS_EXT OS_TMR *OSTmrFreeList; //空闲定时器控制块链表指针
OS_EXT OS_TMR_WHEEL OSTmrWheelTbl[OS_TMR_CFG_WHEEL_SIZE];//定时器轮
OS_TMR 为定时器控制块,定时器控制块是软件定时器管理的基本单元,包含软件定时器的名称、定时时间、在链表中的位置、使用状态、使用方式,以及到时回调函数及其参数等基本信息
OSTmrTbl[OS_TMR_CFG_MAX];:以数组的形式静态分配定时器控制块所需的RAM空间,并存储所有已建立的定时器控制块, OS_TMR_CFG_MAX 为最大软件定时器的个数。
OSTmrFreeLiSt:为空闲定时器控制块链表头指针。空闲态的定时器控制块(OS_TMR)中,OSTmrnext 和 OSTmrPrev 两个指针分别指向空闲控制块的前一个和后一个,组织了空闲控制块双向链表。建立定时器时,从这个链表中搜索空闲定时器控制块。
OSTmrWheelTbl[OS_TMR_CFG_WHEEL_SIZE]:该数组的每个元素都是已开启定时器的一个分组,元素中记录了指向该分组中第一个定时器控制块的指针,以及定时器控制块的个数。运行态的定时器控制块(OS_TMR)中,OSTmrnext和OSTmrPrev两个指针同样也组织了所在分组中定时器控制块的双向链表
软件定时器管理任务的流程如图:
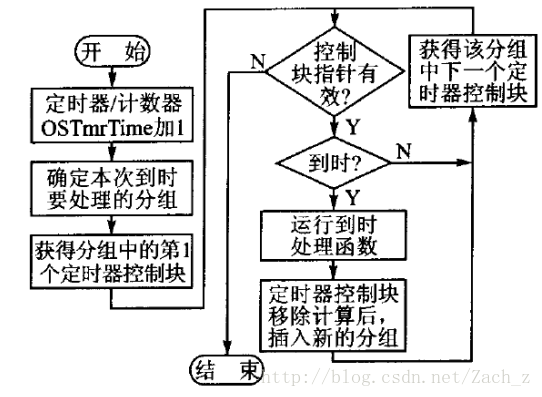
当运行完软件定时器的到时处理函数之后,需要进行该定时器控制块在链表中的移除和再
插入操作。 插入前需要重新计算定时器下次到时时所处的分组。计算公式如下:
定时器下次到时的 OSTmrTime 值(OSTmrMatch)=定时器定时值+当前 OSTmrTime 值
新分组=定时器下次到时的 OSTmrTime 值(OSTmrMatch)%OS_TMR_CFG_WHEEL_SIZE
定时器相关函数
1. 创建软件定时器函数
OS_TMR *OSTmrCreate (INT32U dly, INT32U period, INT8U opt,OS_TMR_CALLBACK callback,void *callback_arg, INT8U *pname, INT8U *perr);
dly,用于初始化定时时间,对单次定时(ONE-SHOT模式)的软件定时器来说,这就是该定时器的定时时间,而对于周期定时(PERIODIC模式)的软件定时器来说,这是该定时器第一次定时的时间,从第二次开始定时时间变为 period
period,在周期定时( PERIODIC 模式),该值为软件定时器的周期溢出时间。
opt,用于设置软件定时器工作模式。可以设置的值为: OS_TMR_OPT_ONE_SHOT
或 OS_TMR_OPT_PERIODIC,如果设置为前者,说明是一个单次定时器;设置为后者则
表示是周期定时器
callback,为软件定时器的回调函数,当软件定时器的定时时间到达时,会调用该函数
callback_arg,回调函数的参数
pname,为软件定时器的名字。
perr,为错误信息
软件定时器的回调函数有固定的格式,我们必须按照这个格式编写,软件定时器的回调函数格式为:
void (*OS_TMR_CALLBACK)(void *ptmr, void *parg);
函数名自己设置,而 ptmr这个参数,软件定时器用来传递当前定时器的控制块指针,所以我们一般设置其类型为OS_TMR*类型,第二个参数(parg)为回调函数的参数,这个就可以根据自己需要设置了,你也可以不用,但是必须有这个参数
2. 开启软件定时器函数
BOOLEAN OSTmrStart (OS_TMR *ptmr, INT8U *perr);
ptmr 为要开启的软件定时器指针
perr 为错误信息
3. 停止软件定时器函数
BOOLEAN OSTmrStop (OS_TMR *ptmr,INT8U opt,void *callback_arg,INT8U *perr);
ptmr 为要停止的软件定时器指针
opt 为停止选项,可以设置的值及其对应的意义为:
OS_TMR_OPT_NONE,直接停止,不做任何其他处理
OS_TMR_OPT_CALLBACK,停止,用初始化的参数执行一次回调函数
OS_TMR_OPT_CALLBACK_ARG,停止,用新的参数执行一次回调函数
callback_arg,新的回调函数参数
perr,错误信息
二、 任务延时
µC/OS-Ⅱ提供了这样一个系统服务:申请该服务的任务可以延时一段时间,这段时间的长短是用时钟节拍的数目来确定的。实现这个系统服务的函数叫做OSTimeDly()。调用该函数会使µC/OS-Ⅱ进行一次任务调度,并且执行下一个优先级最高的就绪态任务。任务调用OSTimeDly()后,一旦规定的时间期满或者有其它的任务通过调用OSTimeDlyResume()取消了延时,它就会马上进入就绪状态。注意,只有当该任务在所有就绪任务中具有最高的优先级时,它才会立即运行。
任务延时函数
OSTimeDly
将一个任务延时若干个时钟,无函数返回值。延时时间的长度可从0到65535个时钟节拍,延时时间0表示不进行延时,函数将立即返回调用者,延时的具体时间依赖于系统每秒种有多少时钟节拍
void OSTimeDly(INT16U ticks)
1
ticks: 要延时的时钟节拍数
OSTimeDlyHMSM
任务延时函数OSTimeDly用于将任务阻塞一段时间,这个时间是以时间片为单位的。如果想以小时、分、秒、毫秒为单位进行任务延时,需要调用以分秒作为单位的任务延时函数OSTimeDlyHMSM
INT8U OSTimeDlyHMSM(INT8U hours, INT8U minutes, INT8U seconds, INT16U milli);
1
hours 小时数 ; minutes 分钟数 ; second 秒数 ; milli 毫秒数
三、 软件定时器和任务延时的区别
调用OSTimeDly或者OSTimeDlyHMSM,意味着该任务CPU使用权会被没收,然而开启一个定时器之后,该任务还可以使用CPU
举例子:如下情景,可以使用软件定时器作超时处理,设备A管理设备B、C、E,设备A向设备BCE设备发送某一消息搜索,如果在T时间内,设备BCE没有回应,设备A将重起并初始化BCE;那么可以在一个任务中,依次向BCE发送消息,并且启动软件动定时器TMRa,TMRb,TMRc,定时器时间到时调用各自的重起并初始化函数;另一方面,如果接收到BCE的消息则停止定时器TMRa,TMRb,TMRc
然而如果用OSTimeDly或者OSTimeDlyHMSM处理上面的场景,可能要多开几个任务管理BCE并增加信号量通知OSTimeDly或者OSTimeDlyHMSM之后,到底是“重起并初始化BCE”还是什么都不做
软件定时器和延时都是基于“系统的节拍”来计时/定时的,虽然软件定时器是在一个高优先级的任务中管理,这个任务也是由“系统节拍中断“中向其发送信号量,因此还是基于“系统的节拍”
没必要去对它们的区别做出一个定义,关键还是去理解它们的应用场合,它们都能解决什么问题
四、 stm32上使用UCOSII的软件定时器和任务延时
led0通过软件定时器,每500ms执行一次回掉函数,来实现闪烁
led1通过任务延时,每500ms执行一次led1任务,来实现闪烁
/////////////////////////UCOSII任务设置///////////////////////////////////
//START 任务
//设置任务优先级
#define START_TASK_PRIO 10 //开始任务的优先级设置为最低
//设置任务堆栈大小
#define START_STK_SIZE 64
//任务堆栈
OS_STK START_TASK_STK[START_STK_SIZE];
//任务函数
void start_task(void *pdata);
//定时器设置任务
//设置任务优先级
#define TIMER_TASK_PRIO 5
//设置任务堆栈大小
#define TIMER_STK_SIZE 64
//任务堆栈
OS_STK TIMER_TASK_STK[TIMER_STK_SIZE];
//任务函数
void timer_task(void *pdata);
//LED1任务
//设置任务优先级
#define LED1_TASK_PRIO 4
//设置任务堆栈大小
#define LED1_STK_SIZE 64
//任务堆栈
OS_STK LED1_TASK_STK[LED1_STK_SIZE];
//任务函数
void led1_task(void *pdata);
///////////////////////////////////////////////////////////////////////////////////////////////
OS_TMR * tmr1; //软件定时器1
int main(void)
{
delay_init(); //延时函数初始化
NVIC_Configuration();
LED_Init(); //初始化与LED连接的硬件接口
OSInit();
OSTaskCreate(start_task,(void *)0,(OS_STK *)&START_TASK_STK[START_STK_SIZE-1],START_TASK_PRIO);//创建起始任务
OSStart();
}
//开始任务
void start_task(void *pdata)
{
u8 err;
OS_CPU_SR cpu_sr=0;
pdata = pdata;
OS_ENTER_CRITICAL(); //进入临界区(无法被中断打断)
OSTaskCreate(timer_task,(void *)0,(OS_STK*)&TIMER_TASK_STK[TIMER_STK_SIZE-1],TIMER_TASK_PRIO);
OSTaskCreate(led1_task,(void *)0,(OS_STK*)&LED1_TASK_STK[LED1_STK_SIZE-1],LED1_TASK_PRIO);
OSTaskSuspend(START_TASK_PRIO); //挂起起始任务.
OS_EXIT_CRITICAL(); //退出临界区(可以被中断打断)
}
//软件定时器1的回调函数
//每500ms执行一次,用于LED0偏转
void tmr1_callback(OS_TMR *ptmr,void *p_arg)
{
LED0=!LED0;
}
//定时器设置任务
void timer_task(void *pdata)
{
u8 err;
tmr1=OSTmrCreate(0,50,OS_TMR_OPT_PERIODIC,(OS_TMR_CALLBACK)tmr1_callback,0,"tmr1",&err);//500ms执行一次
OSTmrStart(tmr1,&err);//启动软件定时器1
while(1)
{
delay_ms(500);
}
}
void led1_task(void *pdata)
{
while(1)
{
//OSTimeDly(100);//500ms执行一次
OSTimeDlyHMSM(0,0,0,500);//500ms执行一次
LED1=!LED1;
}
}
史海拾趣
|
时代在进步,一切的事物也跟著e化,记得以前当学生时,上学时搭公车都要准备一大堆零钱,现在都改成公车储值卡,每天坐火车都要买火车票,现在火车也推出磁卡,捷运更是一开始就直接采用磁卡,没有票就无法进站,也不会有人逃票,现在连公司上班打卡也都改成 ...… 查看全部问答> |
|
分数给完了,事后一定加分.LCD能显示Logo图片, 之后什么也不显示了, 我估计可能是FrameBuffer配置错了, 如何解决. 掌微的A3 CPU, wince5.0, EBoot能正常运行,NK也已运行(Logo图片以文件的形式包含在NK.Bin中), LCD能显示Logo图片, 之后什么也不显示了, 我估计可能是FrameBuffer配置错了. 请问如何检查下 WinCE 代码里面对LCD控制器有没有错误的配置? 如何检 ...… 查看全部问答> |
|
在进行ADC转换时,进行四个通道的转换,发现读取数据时第一次采样读数变了第二位,第二个数据变成第三位,第三位数据变成第四位,第四位数据变成了第一位。那么奇怪的?不知哪里出现了问题。我想的是需要的时候才进行ADC转换。 int main(voi ...… 查看全部问答> |
|
在液晶上显示一行字符串,可不知为什么在液晶的最上方有一行小点,显示第二行时又在上方出行一行小点,如果多显示几行,则第一行的字符串就会完全看不清了。见附图。 请高手指点一下。 [ 本帖最后由 keilc51 于 2012-11-11 16:50 编辑 ]… 查看全部问答> |