



历史上的今天
今天是:2025年03月20日(星期四)

2019年03月20日 | 英伟达新品布局L2自动驾驶
2019-03-20 来源:eefocus
英伟达GTC 2019大会(GPU技术大会)在美国硅谷举行。发布会上,CEO黄仁勋用2个多小时的时间,向外界公布了英伟达最新的产品进展,包括基于RTX显卡和平台打造的支持实时光线追踪的游戏进展、实时设计协作软件Omniverse、Tensor Core支持混合精度、用于数据科学的超算DGX POD等。
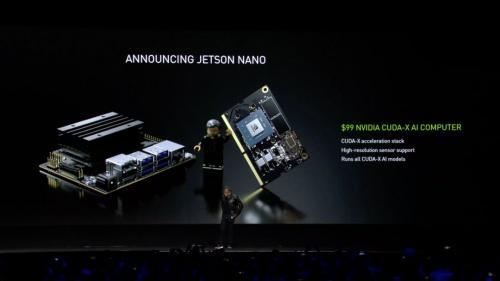
发布Jeston Nano计算模块,追逐树莓派市场
在机器人领域,英伟达发布了一款小巧便宜的基于Tegra X1的Jetson计算模块——Jeston Nano,模块本身只不过是SoC,RAM,NAND和VRM组合。它不同之前发布的嵌入式高性能利器AVG Xavier,也不同于更早发布的Jetson TX2开发套件。此次发布的Jetson Nano采用VIDIA Maxwell GPU架构,具备128 CUDA核,CPU是4核ARM A57。内存为4GB 64位 LPDDR4。

Nano GPU计算能力虽然只有472GFlops(FP16),但Nano模组功耗只有5W,远远低于GTX1080。Nano的编解码能力,Encoder支持 4K @ 30FPS、1080P @ 4路 30fps,720p甚至达到8路 * 30帧/s。该开发套件只售99美元,尺寸只有100mm*80mm*29mm大小。
超低性价比的Jetson Nano确实让广大开发者感到惊喜,不过NVIDIA正在追逐Raspberry Pi市场也让人感觉意外。
曾经数字货币得势之时,英伟达的显卡买到断货,股票也是飞涨。而近一段时间,数字货币市场颓势尽显,这份市场也被断送,必须要拓展出新的市场。近日,英伟达也完成了史上最大手笔收购,69亿美元现金拿下以色列芯片公司Mellanox,该公司提供智能互联解决方案。
尽管目前树莓派市场并没有特别大,但是螃蟹腿也是肉,用较短的开发周期低价占领市场,同时NVIDIA也将其Isaac机器人软件作为自己的SDK发布。
除此之外,在GTC2019大会上,重新推出所有NVIDIA的各种自动驾驶汽车技术和产品。
自动驾驶平台更新,发布云模拟平台
NVIDIA针对自动驾驶的平台NVIDIA DRIVE平台包括车载计算机(DRIVE AGX)和完整参考架构(DRIVE Hyperion),以及数据中心托管模拟平台(DRIVE Constellation)和深度神经网络(DNN)培训平台(DGX) 。这些平台还包括丰富的软件开发工具包(SDK),以加速自动驾驶汽车(AV)的开发。
NVIDIA DRIVE AGX开发人员套件提供开发量产级自动驾驶汽车(AV)所需的硬件,软件和示例应用程序。DRIVE AGX Xavier开发套件(SKU 2000):包括两个Xavier片上系统(SoC),用于开发SAE Level 2/3自动驾驶应用。DRIVE AGX Pegasus开发人员套件(SKU 2200):包括两个Xavier SoC和两个NVIDIA Turing GPU,用于开发robotaxi应用程序。
而在今天的GPU技术大会上,黄宣布推出NVIDIA DRIVE AP2X - 一个完整的Level 2+自动驾驶解决方案,包括DRIVE AutoPilot软件,DRIVE AGX和DRIVE验证工具。
DRIVE AP2X融合了DRIVE AV自动驾驶软件和DRIVE IX智能驾驶舱体验。每个都采用高性能,高能效的NVIDIA Xavier片上系统(SoC),采用DriveWorks加速库和DRIVE OS(一种实时操作系统)。

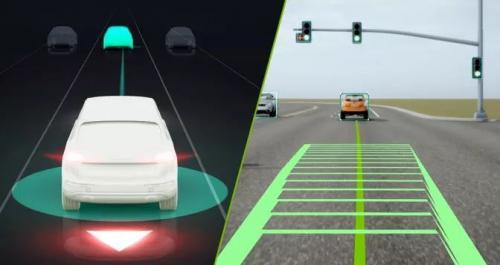
同时,它增加了各种新的自动驾驶功能,包括更深入的神经网络,面部识别功能和其他传感器集成选项。为了增强映射和本地化,DRIVE AP2X软件将包括MapNet,一种识别车道和地标的DNN。为了实现强大而舒适的车道保持,一套三种不同的路径规划DNN将提供更高的准确性和安全性。
ClearSightNet允许车辆检测到摄像机失明,就像太阳直接照射到传感器中,或者当泥或雪限制其视野时。这允许汽车采取行动来弥补任何传感器障碍物。
对于驾驶员监控,新的DNN可实现面部识别。生态系统合作伙伴和制造商可以使面部识别能够打开或启动汽车,以及进行座位和其他客舱调整。
DRIVE AP2X软件还具有新的可视化功能。为了建立对自动驾驶能力的信任,置信度视图为车辆乘员提供了车辆环绕摄像机感知,当前速度,速度限制和驾驶员监控的可视化,所有这些都在一个屏幕上。

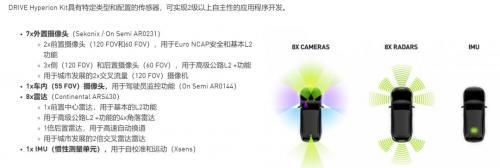
NVIDIA DRIVE Hyperion是NVIDIA Level 2+自治解决方案的参考架构,包括完整的传感器套件和AI计算平台,以及用于自动驾驶,驾驶员监控和可视化的完整软件堆栈。DRIVE Hyperion套件可以集成到测试车辆中,使AV开发人员能够开发,评估和验证AV技术。
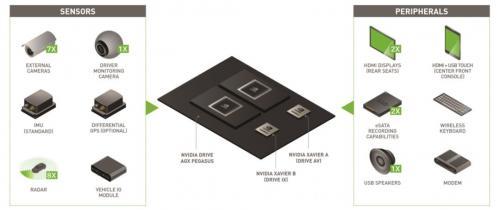
借助NVIDIA DRIVE Hyperion,软件配置用于数据采集(各种传感器),数据记录(使用存储设备),可视化(使用车内显示),车辆界面(使用线控驱动器接口)和软件更新(使用调制解调器)。这允许开发人员使用NVIDIA DRIVE应用程序和DRIVE软件进行体验,评估和开发。
GTC2019上也推出了NVIDIA DRIVE Constellation?,这是一个基于云的虚拟现实仿真平台,旨在支持自动驾驶汽车的开发和验证。该平台是一个数据中心解决方案,由两个并排服务器组成:
第一台服务器; DRIVE Constellation Simulator使用运行DRIVE Sim软件的NVIDIA GPU来模拟虚拟世界。模拟器从虚拟世界中驾驶的虚拟汽车生成传感器输出。
第二台服务器; DRIVE Constellation Vehicle,包含运行完整AV软件堆栈的DRIVE AGX Pegasus AI车载计算机,用于处理模拟的传感器数据。
DRIVE Constellation Vehicle的驾驶决策反馈到DRIVE Constellation Simulator,实现了精确的硬件在环测试。


DRIVE Constellation 用户可以通过云远程访问任何平台。开发人员可以提交一个特定的模拟场景 - 例如,在潮湿的道路上雾蒙蒙的夜晚,一辆自动驾驶汽车对另一辆汽车在交通繁忙时切入车道作出反应。
为了确定AV的性能,开发人员可以设置特定的评估程序,例如碰撞时间,跟随距离和乘客舒适度,在运行时查看测试,并可视化结果。
具有特定变化的相同测试可突出极端和危险条件 - 如密集交通,恶劣天气和低能见度 - 可以并行运行。这种大规模的验证功能就像运行大量的测试车辆虚拟车队,在很短的时间内完成数月或数年的测试。
DRIVE Constellation是一个开放式平台,意味着它提供了一个编程接口,允许DRIVE Sim生态系统合作伙伴集成他们的环境模型,车辆模型,传感器模型和交通场景。通过整合各种合作伙伴,该平台可以生成全面,多样化和复杂的测试环境。
NVIDIA还详细介绍了DRIVE规划和控制软件层,作为其DRIVE AV软件套件的一部分。该层由路线规划器,车道规划器和行为规划器组成,它们协同工作以实现安全舒适的驾驶体验。驱动器规划和控制软件的主要组件是NVIDIA安全力场(SFF)。
总结
英伟达在自动驾驶应用布局谨慎而全面,由通用的模块渐渐为L2专门定制出专属模块,同时云仿真也在一定程度上拓展了虚拟测试的边界
史海拾趣
|
摘要: 介绍基于SRAM LUT结构的FPGA器件的上电配置方式;着重介绍采用计算机串口下载配置数据的方法和AT89C2051单片机、串行EEPROM组成的串行配置系统的设计方法及实现多任务电路结构中配置的方法,并从系统的复杂度、可靠性和经济性等方面进行比较 ...… 查看全部问答> |
|
看到一些职场的小警示,感觉很不错,和大家分享一下。题目是我起的,意思就是让大家别以为有些规则可以违背,虽然公司的员工手册上讲得天花乱坠。 &nb ...… 查看全部问答> |
|
c51能实现64位的浮点运算吗?float 32位的误差太大了! 在单片机上做计算器的功能,需要比较高的精度,用float他只能支持到7位精度,超过7位的都给我四舍五入了,带来的误差实在太大了!我想用double双精度但sizeof发现他也是4个byte的和float一个样,难道c51单片机就没办法实现64位的双精度浮点运算? ...… 查看全部问答> |
|
近年来,触摸技术正在迅速向不同的市场领域渗透。尽管触摸技术类型迥异,但与其他技术相比,用于按键应用和屏幕应用的电容式触摸增长和渗透最快。其主要原因就在于,采用触摸按键不仅可以改善美学和工业设计,还能够提升可靠性,因为电容式触摸按键 ...… 查看全部问答> |
|
本人新学MSP430,用的是并口仿真器,按网上所说并口模式改为EPP+ECP,并将Debugger-》Driver设置成Fet-Debugger,Fet debugger ->setup设置为LPT-IF,但是没有办法下载程序,总是报错: Fatal error: Failed to initialize. Check if h ...… 查看全部问答> |
|
MSPGCC的维护者Peter(pabigot) 最近完成了MSP430板级支持包的发布, 一般BSP都是一些比较高端或者复杂些的板子才会有,MSP430板级支持包的发布, 说明430的开发环境越来越成熟,越来越丰富了。 既来之则用之,哈哈! 目前主要支持MSP430的官方 ...… 查看全部问答> |
|
关于嵌入式Linux系统flash分区设计及文件系统格式选择的一些浅见 嵌入式系统应用程序升级是比较频繁的,这就需要将flash进行合理的划分,一般情况,flash 的基本分区都有这几部分:1.uboot分区2.kernel分区3.rootfs分区这三部分是最基本的,一般都有。如果只是这样分区,然后应用程序和文件系统放在一起,这样的话 ...… 查看全部问答> |