



历史上的今天
今天是:2024年09月14日(星期六)

2019年09月14日 | 大疆让可穿戴设备可以控制无人机吗?
2019-09-14 来源:爱集微
近日大疆推出了一款面向第一人称视角(FPV)无人机的控制器和图传系统,并配有FPV飞行眼镜、图传模块、遥控器、相机等设备。该产品采用数字图传技术,可以实现高清流畅的图像传输,并且其遥控器采用一体化操作,飞行前无需进行繁琐的设备调试。
无人机作为一种新兴的飞行设备,已经在多个领域得到了广泛的应用,但是目前无人机的远程控制主要通过手持式遥控终端来实现,其体积较大、不便于携带,另外还对操作手的要求较高。为了减小这种弊端,同时降低飞行器的操作难度,大疆申请了一项名为“一种用于控制无人机的穿戴式设备及无人机系统”的发明专利(申请号为:201910392512.X),申请人为深圳市大疆创新科技有限公司。
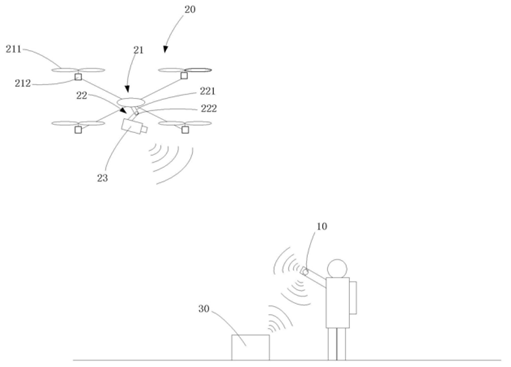
图2
图2是该无人机系统示意图,该系统主要包括穿戴式设备10和无人机20。穿戴式设备10由操作者佩戴,并通过无线通信方式与无人机20进行通信,进而对无人机的飞行过程及成像设备23的拍摄过程进行控制。
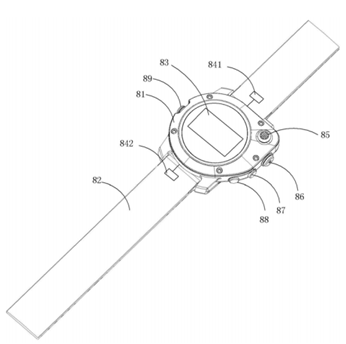
图3
上图是可穿戴设备10的一种外观图,当然它也可以设计成项链、眼镜、耳机、衣服等其他形式。该可穿戴设备的处理器通过通信模块将它的状态信息发送至无人机20,以使无人机根据穿戴设备的状态信息和其自身的状态信息产生相应的控制指令。同时它还配备多种传感器,以获取可穿戴设备的经纬度坐标、相对高度、方位、运动参数等信息。
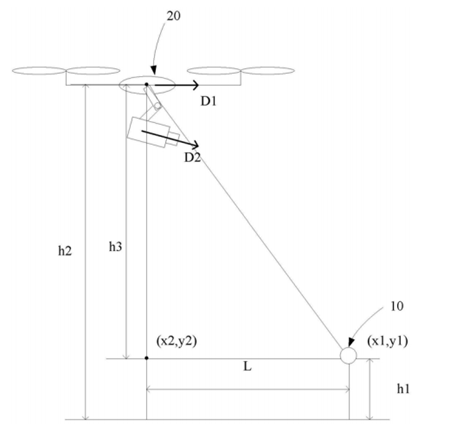
图4
在实际操作中,可以通过穿戴设备10的位置信息(x1, y1)和无人机20的位置信息(x2, y2)计算出两者在水平面上的投影距离L。根据计算得到的投影距离L与预设的距离范围的比较结果来产生飞行控制指令,进而在水平面上控制无人机20 0前进或后退,以使得无人机20与穿戴设备10在水平面上的投影距离L保持在预设的距离范围内。通过上述方式,可以实现无人机20相对于穿戴设备10的水平距离跟踪。同理也可以通过无人机和穿戴设备的高度传感器,来实现无人机20相对于穿戴设备10的垂直距离跟踪。
另外,我们也可根据穿戴设备10的运动参数产生来产生对应的控制指令。因为穿戴设备10和无人机20上都配有存储器,可用于存储动作模板以及动作模板相关联的控制指令,然后穿戴设备10根据运动参数形成的动作指令与动作模板进行匹配,并产生相应指令。比如,将操作者的挥手动作所满足的运动轨迹或者方向、速度或加速度的变化规律设置成动作模板,并与方向控制指令进行关联,那么每次操作者执行挥手动作时,都会向飞行器发出方向控制指令,进而控制无人机的飞行状态。
通过上述方式,将无人机的地面控制端设置成穿戴设备的形式,有效地提高了控制端的便携性,同时可以根据穿戴设备的状态信息来产生相应控制指令,进而降低了操作复杂度。随着这种技术的应用,相信可以让无人机“小白”对无人机的操控也变得得心应手。
史海拾趣
|
今天给电脑装了新系统,但是转过后发现usb-blaster不管用了,郁闷中 插上下载线后出现如下提示 file:///C:/Documents%20and%20Settings/Administrator/桌面/1.png 发现了新硬件。然后出现安装向导了 file:///C:/Documents%20and%20Settings/Adm ...… 查看全部问答> |
|
帮我看看这段键盘扫描程序,程序设置按键按下时变量置位,按键放下时按变量 返回值,可是我在主程序用key_val=keyscan()调用时却出现问题,当没键按下时 键盘扫描程序不执行语句,只执行判断语句,这是函数返回的是什么值,是返回 void型还是0, ...… 查看全部问答> |
|
我在EVC下用向导创建了一个项目,然后添加了3个按钮,分别称为1,2,3。想要实现下列功能: 在按钮1被按下是运行一个mfc应用程序,想要在这个程序执行时探测是否2,3按钮被按下,例如:如果2被按下, 则执行按钮2对应的read(){}函数。不知道以上 ...… 查看全部问答> |
|
/******************************************************************************GPxCON是端口x(x为:0、1、2)的控制寄存器GPxDAT 是端口x 的配置和数据寄存器GPxSET 为端口x 的数据设置寄存器GPxCLR 为端口x 的数据清除寄存器对GPxPAR 寄存器 ...… 查看全部问答> |