



历史上的今天
今天是:2024年08月31日(星期六)
2020年08月31日 | STM32——如何配置通用定时器中断
2020-08-31 来源:eefocus
STM32的定时器
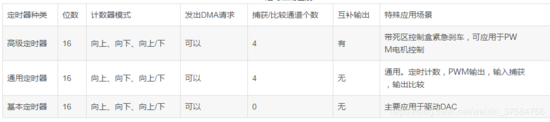
STM32F103ZET6一共有8个定时器,其中分别为:
高级定时器(TIM1、TIM8);通用定时器(TIM2、TIM3、TIM4、TIM5);基本定时器(TIM6、TIM7)。

除非APB1的分频系数是1,否则通用定时器的时钟等于APB1时钟的2倍。
默认调用SystemInit函数情况下:
SYSCLK=72M
AHB时钟=72M
APB1时钟=36M
所以APB1的分频系数=AHB/APB1时钟=2
所以,通用定时器时钟CK_INT=2*36M=72M
定时器中断的一般步骤
实例要求:通过TIM3的中断来控制led1的亮灭
硬件:LED——GPIOB,GPIO_Pin_5
1、使能定时器时钟。调用函数:RCC_APB1PeriphClockCmd();
2、初始化定时器,配置ARR、PSC。调用函数:TIM_TimeBaseInit();
3、开启定时器中断,配置NVIC。调用函数:void TIM_ITConfig();NVIC_Init();
4、使能定时器。调用函数:TIM_Cmd();
5、编写中断服务函数。调用函数:TIMx_IRQHandler()。
定时时间的计算公式
决定CK_CNT的频率是由分频系数决定的,分频系数PSC决定了计数器计数一次的时间 t=1/CK_CNT
CK_CNT=CK_INT/(71+1)=1MHz
1/CK_CNT=1us
APB1的预分频系数决定是36MHzx1还是36MHzx2,这里的APB1预分频系数是2则是72MHz
(PSC+1)/72MHz=1us
Arr的重装周期是1~65535,参考寄存器手册,所以不需要减一,分频系数减一,周期不需要
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_SetBits(GPIOB,GPIO_Pin_5); //PB.5 输出高 此时状态为灭 低电平亮
}
void TIM3_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
//定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = 1000; //自动重装载寄存器周期的值1/CK_CNT=1us,1000x1us=1ms
TIM_TimeBaseStructure.TIM_Prescaler =71; //设置用来作为TIMx时钟频率除数的预分频值CK_CNT=CK_INT/(71+1)=1MHz
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //TIM_CKD_DIV1是.h文件中已经定义好的,TIM_CKD_DIV1=0,也就是时钟分频因子为0
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
TIM_Cmd(TIM3, ENABLE); //使能TIMx
}
void NVIC_Init(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
NVIC_InitTypeDef NVIC_InitStructure; //中断优先级NVIC设置
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
}
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否
{
time++;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志
}
}
int main(void)
{
delay_init(); //延时函数初始化
LED_Init(); //LED端口初始化
TIM3_Init(); //1ms的计时
NVIC_Init(); //NVIC初始化
while(1)
{
if(time==500) //500x1ms=500ms
{
LED0=!LED0;
delay_ms(200);
time = 0;
}
}
}
库函数解析:
定时器参数初始化:
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
typedef struct
{
uint16_t TIM_Prescaler;
uint16_t TIM_CounterMode;
uint16_t TIM_Period;
uint16_t TIM_ClockDivision;
uint8_t TIM_RepetitionCounter;
} TIM_TimeBaseInitTypeDef;
IM_TimeBaseStructure.TIM_Period = 1000;
TIM_TimeBaseStructure.TIM_Prescaler =71;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
定时器使能函数: void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
定时器中断使能函数:void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
状态标志位获取和清除:
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
史海拾趣
|
如何学好电子技术-致初学者 学习电子技术是一个循序渐进的过程,我个人认为应该分五步来走: 第一步,培养兴趣。受家庭影响,我从小就对电子技术产生了浓厚兴趣,整天把一些电池、导线、小灯泡连来连去,为搞清楚收音机里为何能发出人说 ...… 查看全部问答> |
|
这也只是我写的一段简单的程序,但是硬件方面我就完全不懂了 哪位高手帮下忙啊.............. 用的是汇编语言的说 ORG 8000H AJMP DAMOT ORG 8100H DAMOT: MOV DPTR,#9000H MOV A,#80H MOVX @DPTR,A ...… 查看全部问答> |
|
用protel软件已经有半年的时间了,在做低速电路板设计时感觉还行,但现在要设计八层的核心板,protel软件已经是力不从心了。改用Cadence了,刚开始学习真有点摸不住头脑了,里面的设置比protel复杂得多。在学习完一个月后,里面遇到的问题实在是太 ...… 查看全部问答> |
|
用周立功的M0板子(LPC1114)烧写时说仿真器不能初始化,报错为 AGDI fatal error :initialize fail,硬件自检不到,是不是芯片坏掉了… 查看全部问答> |
|
【四】【FPGA助学系列—NIOS篇】软核也疯狂1—图解NIOS建立 【FPGA助学系列—NIOS篇】软核也疯狂(1)—图解NIOS建立1. NIOS是什么在与NIOS第一次亲密接触之前,你的底线是什么?不是是懂非懂的问NIOS有多快,NIOS能不能替代单片机,而是要搞清楚到底NIOS是什么。老样子 ...… 查看全部问答> |
|
在标准C语言的的教材中,对于位运算的操作是基本不涉及的,但是在单片机系统的程序中,需要经常操作各类以字节为单位的寄存器,而这些寄存器通常都是以二进制中的位为控制单位的数据组合。往往一个8位寄存器中的每一位都有各自的控制对象,例如端口 ...… 查看全部问答> |