



历史上的今天
今天是:2025年07月30日(星期三)
2021年07月30日 | STM32CubeMX | 36 - 使用CAN总线进行双板通信(TJA1050)
2021-07-30 来源:eefocus
本篇详细的记录了如何使用STM32CubeMX配置 STM32F407ZGT6 的硬件CAN接口与另一个开发板之间通信。
硬件准备
开发板
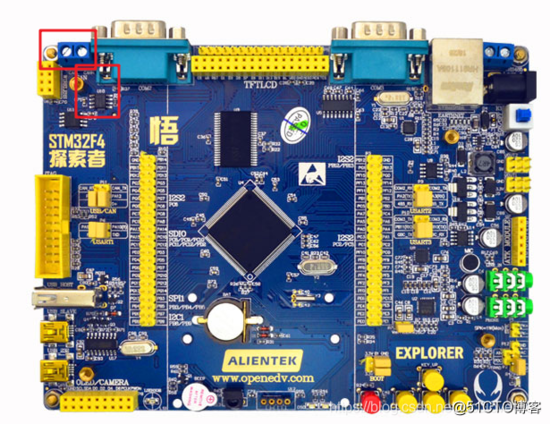
首先需要准备一个开发板,这里我准备的是STM32F407ZGT6的开发板,称之为 1# 实验板。
CAN收发器
开发板板载一块CAN收发器TJA1050,如图中红框所示:
软件准备
需要准备一份 TJA1050 的数据手册。
实验说明
本实验中还需要另外准备一块具备CAN收发功能的开发板,这里我使用STM32F767开发板,其板载CAN收发器也是TJA 1050,称之为 2# 实验板:
两个开发板之间的连接方式如下:
这样就形成了一个CAN总线的闭环通信网络,最高通信速度可达 1M bps/s:
选择芯片型号
打开STM32CubeMX,打开MCU选择器:
搜索并选中芯片STM32F407ZGT6: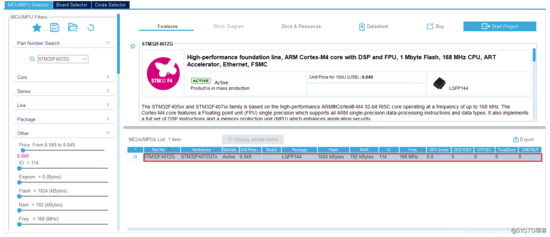
配置时钟源
如果选择使用外部高速时钟(HSE),则需要在System Core中配置RCC;
如果使用默认内部时钟(HSI),这一步可以略过;
这里我都使用外部时钟: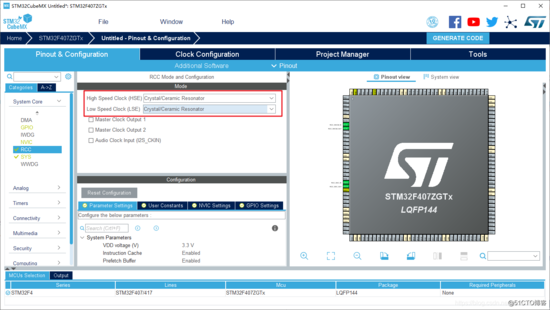
调试选项配置
默认没有配置下载引脚,烧录之后下载器将无法再检测到,这里我使用ST-Link,所以配置为SW选项:
配置串口
开发板板载了一个CH340换串口,连接到USART1,但是引脚不是默认引脚,需要手动修改。
接下来开始配置USART1:
配置CAN外设
CAN收发器
开发板上CAN收发器(TJA1050)的原理图如下:
其中CAN_TX 和 CAN_RX 连接到CAN1外设:
| 网络标号 | 引脚 |
|---|---|
| CAN_TX | PA12 |
| CAN_RX | PA11 |
正点原子该款开发板上的PA12和PA11被复用,需要使用跳线帽来选择连接到CAN收发器。
配置CAN1控制器
选中CAN1,点击使能“Master Mode”,在右边即可看到CAN1控制器的默认GPIO,与原理图上连接CAN收发器的引脚一致,无需修改:
配置CAN控制只需配置波特率,一般为500KHz,最高1MHz,其它保持默认即可。
CAN总线的波特率比较特别,串口协议的波特率只支持一个确定值,而CAN总线的波特率支持一个较宽的范围,这也使得CAN总线的抗噪声性能大大增强。
CAN总线的波特率计算方式如下:
① 确定CAN外设连接的外设总线时钟PCLK1
此处CAN1连接到APB1外设总线上,在配置HCLK=168Mhz的基础上,PCLK=42Mhz。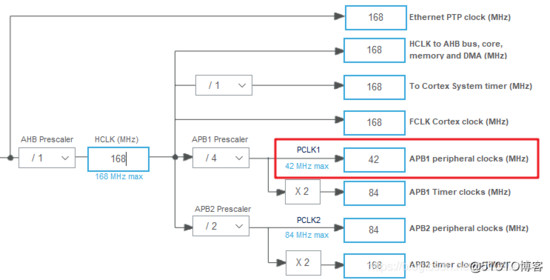
② 确定分频系数
此处将PCLK1进行7分频,为 42Mhz / 7 = 6Mhz,所以设置CAN1外设的分频系数为7: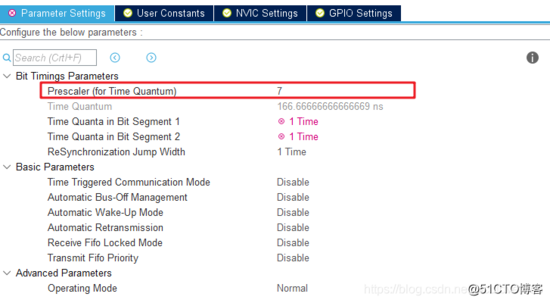
③ 配置位段时序
CAN协议的每一个数据位都分为许多时间段,如图:
同步段(SYNC_SEG):位变化应该在此时间段内发生,只有一个时间片的固定长度(1 x tq);
位段1(BS1):定义采样点的位置,其持续长度可以在 1 到 16 个Tq之间调整;
位段2(BS2):定义发送点的位置,其持续长度可以在 1 到 8 个Tq之间调整;
同步跳转宽度(SJW):定义位段加长或缩短的上限,它可以在 1 到 4 个Tq之间调整;
目标波特率是500khz,设:
B S 1 + B S 2 + S J W = T BS1+BS2+SJW = T BS1+BS2+SJW=T
根据:
6 M h z / T = 6000 k h z / T = 500 k h z 6Mhz/T = 6000khz / T = 500khz 6Mhz/T=6000khz/T=500khz
计算出:
T = 12 T = 12 T=12
最后在BS1、BS2、SJW的每个范围内,调整出和为12即可,本文配置如下:
使能CAN1控制器接收中断

配置时钟树
STM32F407ZGT6的最高主频到168M,使HCLK = 168Mhz即可: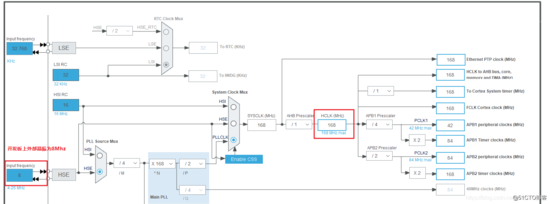
生成工程设置
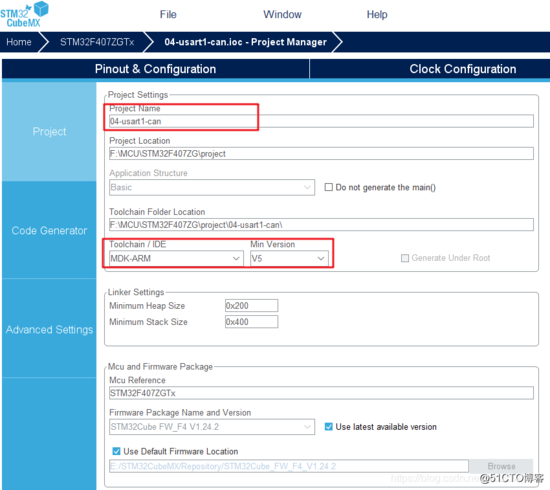
代码生成设置
最后设置生成独立的初始化文件:
生成代码
点击GENERATE CODE即可生成MDK-V5工程:
4.1. 重定向printf到串口1
/* USER CODE BEGIN 1 */
#if 1
#include int fputc(int ch, FILE *stream) { /* 堵塞判断串口是否发送完成 */ while((USART1->SR & 0X40) == 0); /* 串口发送完成,将该字符发送 */ USART1->DR = (uint8_t) ch; return ch; } #endif /* USER CODE END 1 */ 具体参考这篇博客:STM32CubeMX_09 | 重定向printf函数到串口输出的多种方法 4.2. 编写CAN1收发测试代码 ①编写CAN过滤器配置函数 在 CAN 协议中,发送节点将报文广播给所有接收器。而接收节点会根据报文标识符的值来确定节点是否需要该消息,为了简化软件的工作, STM32 的 CAN 外设接收报文前会先使用过滤器检查,只接收需要的报文到 FIFO 中。 STM32的CAN控制器一共有 28 个过滤器,CAN1 和 CAN2 共用这些过滤器。 CAN过滤器结构体定义在stm32f4xx_hal_can.h文件中,在main.c中编写CAN过滤器配置函数(不进行任何过滤): /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* CAN过滤器配置函数 */ static void CANFilter_Config(void) { CAN_FilterTypeDef sFilterConfig; sFilterConfig.FilterBank = 0; //CAN过滤器编号,范围0-27 sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //CAN过滤器模式,掩码模式或列表模式 sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //CAN过滤器尺度,16位或32位 sFilterConfig.FilterIdHigh = 0x000 << 5; //32位下,存储要过滤ID的高16位 sFilterConfig.FilterIdLow = 0x0000; //32位下,存储要过滤ID的低16位 sFilterConfig.FilterMaskIdHigh = 0x0000; //掩码模式下,存储的是掩码 sFilterConfig.FilterMaskIdLow = 0x0000; sFilterConfig.FilterFIFOAssignment = 0; //报文通过过滤器的匹配后,存储到哪个FIFO sFilterConfig.FilterActivation = ENABLE; //激活过滤器 sFilterConfig.SlaveStartFilterBank = 0; if (HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK) { printf("CAN Filter Config Fail!rn"); Error_Handler(); } printf("CAN Filter Config Success!rn"); } /* USER CODE END 0 */ 其中,不同配置模式下四个数据成员内容对应的含义: ② 定义接收和发送消息变量 在main.c文件中定义CAN接收和发送消息变量: /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ static CAN_TxHeaderTypeDef TxMessage; //CAN发送的消息的消息头 static CAN_RxHeaderTypeDef RxMessage; //CAN接收的消息的消息头 /* USER CODE END PV */ ③ 编写CAN接收中断处理函数 在main.c文件的最后编写CAN接收中断处理函数: /* USER CODE BEGIN 4 */ void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) { uint8_t data[8]; HAL_StatusTypeDef status; if (hcan == &hcan1) { status = HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMessage, data); if (HAL_OK == status){ printf("--->Data Receieve!rn"); printf("RxMessage.StdId is %#xrn", RxMessage.StdId); printf("data[0] is 0x%02xrn", data[0]); printf("data[1] is 0x%02xrn", data[1]); printf("data[2] is 0x%02xrn", data[2]); printf("data[3] is 0x%02xrn", data[3]); printf("<---rn"); } } } /* USER CODE END 4 */ ④ 编写CAN发送测试数据函数 /* CAN 发送数据测试函数 */ void CAN1_Send_Test() { uint8_t data[4] = {0x01, 0x02, 0x03, 0x04}; TxMessage.IDE = CAN_ID_STD; //设置ID类型 TxMessage.StdId = 0x222; //设置ID号 TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧 TxMessage.DLC = 4; //设置数据长度 if (HAL_CAN_AddTxMessage(&hcan1, &TxMessage, data, (uint32_t*)CAN_TX_MAILBOX0) != HAL_OK) { printf("CAN send test data fail!rn"); Error_Handler(); } printf("CAN send test data success!rn"); } ⑤ 编写初始化函数 修改main函数,在其中配置CAN滤波器、启动CAN控制器、使能CAN控制器接收中断: /* USER CODE BEGIN 2 */ printf("----- CAN Test Board #1 -----rn"); /* 1. CAN Filter Config */ CANFilter_Config(); /* 2. CAN Start */ if (HAL_CAN_Start(&hcan1) != HAL_OK) { printf("CAN Start Failrn"); Error_Handler(); } printf("CAN Start Successrn"); /* 3. Enable CAN RX Interrupt */ if (HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK) { printf("CAN_IT_RX_FIFO0_MSG_PENDING Enable Failrn"); Error_Handler(); } printf("CAN_IT_RX_FIFO0_MSG_PENDING Enable Successrn"); /* USER CODE END 2 */ ⑥ 在main函数中循环发送测试数据 在while(1)中循环发送测试数据函数: /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ /* 4. Send Data */ CAN1_Send_Test(); HAL_Delay(5000); } /* USER CODE END 3 */ 至此,1#测试板的配置和代码编写完成。 5. 编写2#测试板的代码 第二块板的流程和第一块板的流程几乎相同,有几点需要改动。 ① STM32F767的 PCLK1 = 54Mhz,所以要配置CAN控制器的分频系数为9,其余参数不变: 将两个程序分别编译、下载到开发板中,使用串口助手查看结果。 1#测试板(ID:0x111)的串口打印日志为: 2#测试板(ID:0x222)的串口打印日志为:

② STM32F767开发板默认CAN控制器的接收引脚不匹配,需要修改到PA11:
③ 在代码中将打印信息修改为2#实验板:
④ 在代码中修改发送数据包的ID号,为1#实验板的ID:
其余地方一样。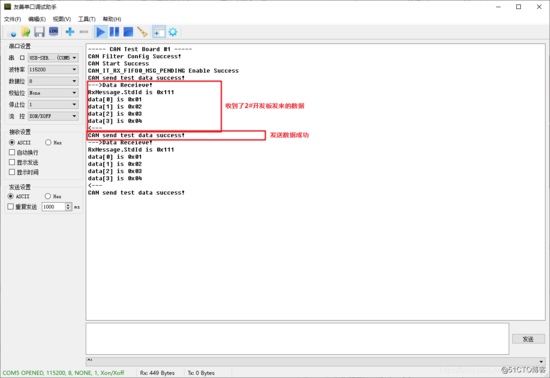

史海拾趣
|
摘 要:随着科技的不断向前发展,汽车电子化程度也越来越高,半导体技术也随之崛起。本文详尽的描述了硅技术的进步,微控制器在汽车应用上的发展以及硅产品在汽车网络所发挥的巨大潜力。最后作者希望汽车制造商和半导体生产商能够密切合作为 ...… 查看全部问答> |
|
湘潭钢铁集团公司(以下简称湘钢)煤气调度系统在改造前使用的都是 型淘汰仪表,截至改造前安装的 /0 块仪表因!电缆等原因已全部瘫痪。“六五”以来湘钢经过几次大的改造煤气用户大量增加,煤气测量点由原来的 12 多点已增至近/22 点,显然现有的煤 ...… 查看全部问答> |
|
sysAuxClkRateSet(int rate)函数中,rate只能设成(2,4,8,16,32,64,128,..,1024等等),我想精确定时到1ms或5ms、10ms该怎么办,或者有其它方法吗,请大家帮忙!… 查看全部问答> |
|
圈圈前面几个STM32的程序是直接拿例子来改的,但我们总不能每次都拿别人的例子来改吧?我们要学会如何自己来创建一个属于自己的IAR工程。 首先启动IAR开发环境。如果你的设置是在启动时出现Em ...… 查看全部问答> |
|
首先是@dontium 。共同讨论C2000系列中的CLA的一个计算方法。 图片截取自网络。其中第一项是比例项,第二项是积分项,第三项是微分项。对应的系数是kp,ki,kd。然后根据这个表达式的恒等变换可以得到最后一个表达式。如果计算第一个表达式。每次 ...… 查看全部问答> |