



历史上的今天
今天是:2025年08月06日(星期三)

2021年08月06日 | 基于51单片机的电子秒表设计
2021-08-06 来源:eefocus
设计要求:
最多可记录十组数据
可删除其中多组数据
可上下查阅所记录的数据
数据通过lcd1602显示
计时精度到0.01s
由于并没有使用24c02,导致程序去数据较大,仿真可能不行。实际验证通过
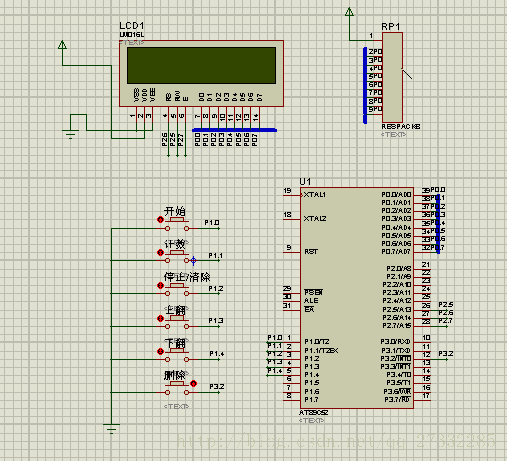
程序界面如图:

仿真界面如图:
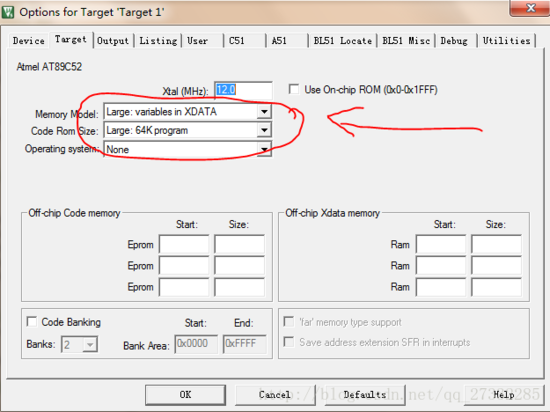
如果编译出错,将keil按如图参数设置:
以下为程序代码:
包括两个文件,主程序里面是:
#include<1602.h>
#include #ifndef uchar #define uchar unsigned char #endif #ifndef uint #define uint unsigned int #endif /*按键定义*/ /*开始键,计数键,停止计数键或者清零键,上下查阅键,删除数据键*/ sbit key_start=P1^0; sbit key_count=P1^1; sbit key_stop=P1^2; sbit key_up=P1^3; sbit key_down=P1^4; /*变量定义*/ int count=0;//计数器 uint i,j,state,k=0,countnum,m,delete; /*设置标志位*/ char flag; char maxflag; char clearflag; char turnflag; // char upflag; //为1时可以继续上翻 char minflag=0; //为0时可以继续下翻 char downflag; /*定义数组 */ unsigned char str[] = "time:"; unsigned char str2[]= "num:"; unsigned char str3[]="...press start.."; unsigned char str4[]="....counting...."; unsigned char str5[]=".. press count.."; unsigned char str6[]="press up or down"; unsigned char str7[]="..overcounting.."; int number[10]=0; int num2[5]=0; void keyscan(); void init(); void main() { InitLcd1602(); init(); /*以下为调试程序段*/ LcdShowStr(0,0,str3); // LcdShowStr(0,1,str2); // LcdWriteCom(0x91); // LcdWriteData('0'+1); // LcdWriteCom(0x90); // LcdWriteData('0'+1); /*以上为调试程序段*/ while(1) { //LcdShowStr(0,1,str4); //测试 keyscan(); Lcd1602_Delay1ms(50); } } void init() { IT0=0; EX0=0; TMOD=0x01; TH0=(65536-10000)/256; TL0=(65536-10000)%256; EA=0; //开总中断 // key_count=0; // key_stop=0; // key_up=0; // key_down=0; // key_delete=0; flag=0; //标志位为0时代表未计时状态,为1时代表为计时状态 i=0; maxflag=0;//定时标志位,为1时代表定时已满 clearflag=0;//清除标志位 turnflag=0;//为1时可以上下翻页显示 downflag=0; upflag=1; } void keyscan() { if((key_start==0)&&(flag==0)) //防抖处理 { Lcd1602_Delay1ms(10); //防抖处理 if((key_start==0)&&(flag==0))//防抖处理 { while((!(key_start==0)&&(flag==0)));//防抖处理 InitLcd1602(); EA=1;//检测到开始按键按下后,启动定时器 ET0=1; //计时器0开启 TR0=1; //计时器打开 flag=1;//设置标志位为计时状态 LcdShowStr(0,0,str4); LcdShowStr(0,1,str5); } } if((key_count==0)&&(flag==1)&&(maxflag==0)) { Lcd1602_Delay1ms(50); if((key_count==0)&&(flag==1)&&(maxflag==0)) { while(!((key_count==0)&&(flag==1)&&(maxflag==0))); InitLcd1602(); LcdShowStr(0,0,str); LcdShowStr(0,1,str2); number[i]=count; LcdWriteCom(0xC7); LcdWriteData('0'+i+1); LcdWriteCom(0xC6); LcdWriteData('0'); if(i==9) { LcdWriteCom(0xC7); LcdWriteData('0'); LcdWriteCom(0xC6); LcdWriteData('0'+1); } num2[0]=number[i]/10000; num2[1]=number[i]/1000%10; num2[2]=number[i]/100%10; num2[3]=number[i]/10%10; num2[4]=number[i]%10; LcdWriteCom(0x86); LcdWriteData('0'+num2[0]); LcdWriteCom(0x87); LcdWriteData('0'+num2[1]); LcdWriteCom(0x88); LcdWriteData('0'+num2[2]); LcdWriteCom(0x89); LcdWriteData('.'); LcdWriteCom(0x8A); LcdWriteData('0'+num2[3]); LcdWriteCom(0x8B); LcdWriteData('0'+num2[4]); LcdWriteCom(0x8D); LcdWriteData('S'); i++; state=i; if(i==10) { maxflag=1; } } } if(key_stop==0) { Lcd1602_Delay1ms(50); if(key_stop==0) { while(!(key_stop==0)); if(clearflag==0) { TR0=0; //关定时器,查阅时定时就停止 EX0=1; //开外部中断,保证只有在上下翻阅时才能触发外部中断 count=0;//计数清零 clearflag=1;//清除标志位打开,也就是说再按一下这个按键所有制清零 turnflag=1; minflag=0; } else if(clearflag==1)//此块执行清除任务 { InitLcd1602(); number[10]=0; clearflag=0; LcdShowStr(0,0,str3); turnflag=0; maxflag=0; flag=0; i=0;//将数组计数给清零 } } } if(key_up==0) { Lcd1602_Delay1ms(50); if(key_up==0) { while(!(key_up==0)); if(upflag==0) { InitLcd1602(); LcdShowStr(0,0,str); LcdShowStr(0,1,str2); minflag=0;//只要上翻过后都可以下翻 state++; if(state==10) { LcdWriteCom(0xC7); LcdWriteData('0'); LcdWriteCom(0xC6); LcdWriteData('0'+1); } else { LcdWriteCom(0xC7); LcdWriteData('0'+state); LcdWriteCom(0xC6); LcdWriteData('0'); } m=state-1; delete=m; /*显示时间*/ num2[0]=number[m]/10000; num2[1]=number[m]/1000%10; num2[2]=number[m]/100%10; num2[3]=number[m]/10%10; num2[4]=number[m]%10; LcdWriteCom(0x86); LcdWriteData('0'+num2[0]); LcdWriteCom(0x87); LcdWriteData('0'+num2[1]); LcdWriteCom(0x88); LcdWriteData('0'+num2[2]); LcdWriteCom(0x89); LcdWriteData('.'); LcdWriteCom(0x8A); LcdWriteData('0'+num2[3]); LcdWriteCom(0x8B); LcdWriteData('0'+num2[4]); LcdWriteCom(0x8D); LcdWriteData('S'); if(state==10) { upflag=1; } } } } if(key_down==0) { Lcd1602_Delay1ms(50); if(key_down==0) { while(!(key_down==0)); if((turnflag==1)&&(minflag==0)) { InitLcd1602(); LcdShowStr(0,0,str); LcdShowStr(0,1,str2); /*显示组号*/ state--; LcdWriteCom(0xC7); LcdWriteData('0'+state); LcdWriteCom(0xC6); LcdWriteData('0'); k=state-1; delete=k; /*显示时间*/ num2[0]=number[k]/10000; num2[1]=number[k]/1000%10; num2[2]=number[k]/100%10; num2[3]=number[k]/10%10; num2[4]=number[k]%10; LcdWriteCom(0x86); LcdWriteData('0'+num2[0]); LcdWriteCom(0x87); LcdWriteData('0'+num2[1]); LcdWriteCom(0x88); LcdWriteData('0'+num2[2]); LcdWriteCom(0x89); LcdWriteData('.'); LcdWriteCom(0x8A); LcdWriteData('0'+num2[3]); LcdWriteCom(0x8B); LcdWriteData('0'+num2[4]); LcdWriteCom(0x8D); LcdWriteData('S'); if(state==1) { minflag=1; } upflag=0; } } } } void timer0() interrupt 1 { TH0=(65536-10000)/256; TL0=(65536-10000)%256; count++; if(count==6000) { count=0; ET0=0; //计时器0关闭 TR0=0; //计时器关闭 turnflag=1; EX0=1; InitLcd1602(); LcdShowStr(0,0,str6); LcdShowStr(0,1,str7); } } void counter0(void) interrupt 0 using 1 { number[delete]=0; LcdWriteCom(0x86); LcdWriteData('0'); LcdWriteCom(0x87); LcdWriteData('0'); LcdWriteCom(0x88); LcdWriteData('0'); LcdWriteCom(0x89); LcdWriteData('.'); LcdWriteCom(0x8A); LcdWriteData('0'); LcdWriteCom(0x8B); LcdWriteData('0'); LcdWriteCom(0x8D); LcdWriteData('S'); } 然后是lcd的驱动程序: #include<1602.h> void Read_Busy() //忙检测函数,判断bit7是0,允许执行;1禁止 { unsigned char sta; // LCD1602_DB = 0xff; LCD1602_RS = 0; LCD1602_RW = 1; do { LCD1602_EN = 1; sta = LCD1602_DB; LCD1602_EN = 0; //使能,用完就拉低,释放总线 }while(sta & 0x80); } void Lcd1602_Write_Cmd(unsigned char cmd) //写命令 { Read_Busy(); LCD1602_RS = 0; LCD1602_RW = 0; LCD1602_DB = cmd; LCD1602_EN = 1; LCD1602_EN = 0; } void Lcd1602_Write_Data(unsigned char dat) //写数据 { Read_Busy(); LCD1602_RS = 1; LCD1602_RW = 0; LCD1602_DB = dat; LCD1602_EN = 1; LCD1602_EN = 0; } void LcdSetCursor(unsigned char x,unsigned char y) //坐标显示 { unsigned char addr; if(y == 0) addr = 0x00 + x; else addr = 0x40 + x; Lcd1602_Write_Cmd(addr|0x80); } void LcdShowStr(unsigned char x,unsigned char y,unsigned char *str) //显示字符串 { LcdSetCursor(x,y); //当前字符的坐标 while(*str != '�') { Lcd1602_Write_Data(*str++); } } void InitLcd1602() //1602初始化 { Lcd1602_Write_Cmd(0x38); //打开,5*8,8位数据 Lcd1602_Write_Cmd(0x0c); Lcd1602_Write_Cmd(0x06); Lcd1602_Write_Cmd(0x01); //清屏 } void Lcd1602_Delay1ms(uint c) //误差 0us { uchar a,b; for (; c>0; c--) { for (b=199;b>0;b--) { for(a=1;a>0;a--); } } } /******************************************************************************* * 函 数 名 : LcdWriteCom * 函数功能 : 向LCD写入一个字节的命令 * 输 入 : com * 输 出 : 无 *******************************************************************************/ #ifndef LCD1602_4PINS //当没有定义这个LCD1602_4PINS时 void LcdWriteCom(uchar com) //写入命令 { LCD1602_EN = 0; //使能 LCD1602_RS = 0; //选择发送命令 LCD1602_RW = 0; //选择写入 LCD1602_DB = com; //放入命令 Lcd1602_Delay1ms(1); //等待数据稳定 LCD1602_EN = 1; //写入时序 Lcd1602_Delay1ms(5); //保持时间 LCD1602_EN = 0; } #else void LcdWriteCom(uchar com) //写入命令 { LCD1602_EN = 0; //使能清零 LCD1602_RS = 0; //选择写入命令 LCD1602_RW = 0; //选择写入 LCD1602_DB = com; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改 Lcd1602_Delay1ms(1); LCD1602_EN = 1; //写入时序 Lcd1602_Delay1ms(5); LCD1602_EN = 0; // Lcd1602_Delay1ms(1); LCD1602_DB = com << 4; //发送低四位 Lcd1602_Delay1ms(1); LCD1602_EN = 1; //写入时序 Lcd1602_Delay1ms(5); LCD1602_EN = 0; } #endif /******************************************************************************* * 函 数 名 : LcdWriteData * 函数功能 : 向LCD写入一个字节的数据 * 输 入 : dat * 输 出 : 无 *******************************************************************************/ #ifndef LCD1602_4PINS void LcdWriteData(uchar dat) //写入数据
下一篇:用51单片机实现的简易秒表
史海拾趣
|
摘要:在叙述电磁兼容的定义及其试验方法的基础上介绍抑制电磁干扰的一般方法及其存在的问题。最后介绍新型抗电磁干扰器件—FTS系列群脉冲对抗器与LSA系列雷击浪涌吸收器的特点。 关键词:电磁干扰电磁兼容电磁兼容试验新型抗电磁干扰器件 电磁兼容 ...… 查看全部问答> |
|
本帖最后由 paulhyde 于 2014-9-15 08:54 编辑 2010年广西大学生电子设计大赛题目 大家觉得那道题目容易点呢? ===http://866.cc … 查看全部问答> |
|
在STM32中,有五个时钟源,为HSI、HSE、LSI、LSE、PLL。 ①、HSI是高速内部时钟,RC振荡器,频率为8MHz。 ②、HSE是高速外部时钟,可接石英/陶瓷谐振器,或者接 外部时钟源,频率范围为4MHz~16MHz。 ③、LSI是低速内部时钟,RC振荡器,频 ...… 查看全部问答> |
|
有很多人问关于SafeRTOS的使用,附件是使用的文档,以及相关的头文件.另外可以参考stellaris库例程 \\StellarisWare\\boards\\dk-lm3s9b96\\safertos_demo … 查看全部问答> |
|
如上图是一款轮速信号调理电路,通过调整可调电阻RS,可采集不同传感器信号,其中有几点不明,望高人指点一下: 1)电路将传感器信号分为信号端和公共端,公共端是一个电压比较电路,电压信号恒定为电源电压的1/2,二极管D3 D4限幅电路有必要加 ...… 查看全部问答> |