



历史上的今天
今天是:2024年09月27日(星期五)
2021年09月27日 | STM32F103入门 | 12.PWM实现呼吸灯
2021-09-27 来源:eefocus
12.1. PWM简介
PWM全称为“Pulse Width Modulation”。中文翻译为:脉冲宽度调制。脉冲宽度指的是 脉冲持续的时间,既高电平或低电平保持(持续)的时间。而PWM通俗的说就是人为的(通过微处理器)去控制电平高低保持的时间。这里引出一个新名词,占空比:在一个脉冲的循环中,通电时间相对于总时间所占的比例。
STM32 的定时器除了 TIM6 和 TIM7。其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4 路的 PWM 输出,这样,STM32 最多可以同时产生 30 路 PWM 输出!
12.2. PWM相关寄存器
除了定时器章节介绍的几个寄存器( ARR、PSC、 CR1 等) 外,还会用到 4 个寄存器(通用定时器则只需要 3 个),来控制 PWM 的输出。这四个寄存器分别是:捕获/比较模式寄存器( TIMx_CCMR1/2)、捕获/比较使能寄存器( TIMx_CCER)、捕获/比较寄存器( TIMx_CCR1~4) 以及刹车和死区寄存器( TIMx_BDTR)。
(1)捕获/比较模式寄存器( TIMx_CCMR1/2)
该寄存器总共有 2 个, TIMx _CCMR1 和 TIMx _CCMR2。TIMx_CCMR1 控制 CH1 和 CH2,而 TIMx_CCMR2 控制 CH3 和 CH4。
寄存器分了 2 层,上面一层对应输出时的设置而下面的则对应输入时的设置。模式设置位 OCxM,此部分由 3 位组成。总共可以配置成 7 种模式,我们使用的是 PWM 模式,这 3 位必须设置为110/111。这两种 PWM 模式的区别就是输出电平的极性相反。 另外 CCxS 用于设置通道的方向(输入/输出)默认设置为 0,就是设置通道作为输出使用。
/**
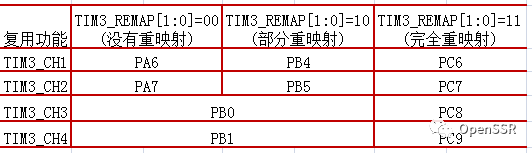
* 没有重映射时,TIM3的四个通道CH1, CH2, CH3, CH4分别对应PA6, PA7, PB0, PB1
* 部分重映射时,TIM3的四个通道CH1, CH2, CH3, CH4分别对应PB4, PB5, PB0, PB1
* 完全重映射时,TIM3的四个通道CH1, CH2, CH3, CH4分别对应PC6, PC7, PC8, PC9
*
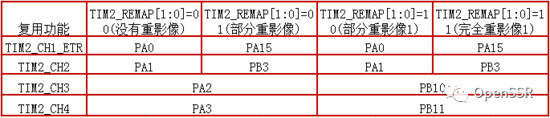
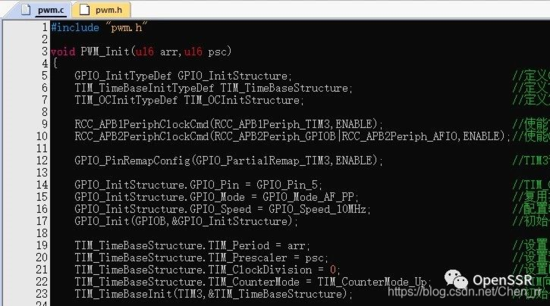
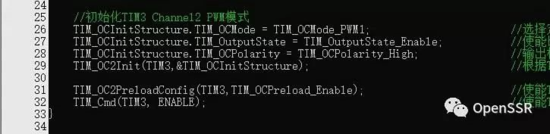
* 110:PWM模式1 - 在向上计数时,一旦TIMx_CNT * 否则为有效电平。 * * 111:PWM模式2 - 在向上计数时,一旦TIMx_CNT * 否则为无效电平。 */ (2)捕获/比较使能寄存器( TIMx_CCER) 这里只用到了 CC1E 位,该位是输入/捕获 1 输出使能位,要想PWM 从 IO 口输出,这个位必须设置为 1。 (3)捕获/比较寄存器( TIMx_CCR1~4) 该寄存器总共有 4 个,对应 4 个输通道 CH1~CH4。在输出模式下,该寄存器的值与 CNT 的值比较,根据比较结果产生相应动作。利用这点,我们通过修改这个寄存器的值,就可以控制 PWM 的输出脉宽了。 (4)刹车和死区寄存器( TIMx_BDTR) 如果是通用定时器,则配置以上三个寄存器就够了,但是如果是高级定时器,则还需要配置:刹车和死区寄存器( TIMx_BDTR)。该寄存器,我们只需要关注最高位: MOE 位,要想高级定时器的 PWM 正常输出,则必须设置 MOE 位为 1,否则不会有输出。注意:通用定时器不需要配置这个。 12.3. PWM波形产生原理 通用定时器可以利用 GPIO 引脚进行脉冲输出,在配置为比较输出、PWM 输出功能时,捕获/比较寄存器 TIMx_CCR 被用作比较功能,下面把它简称为比较寄存器。 这里直接举例说明定时器的PWM输出工作过程:若配置脉冲计数器TIMx_CNT 为向上计数,而重载寄存器 TIMx_ARR 被配置为 N,即 TIMx_CNT 的当前计数值数值X在 TIMxCLK 时钟源的驱动下不断累加,当 TIMx_CNT 的数值X大于 N 时,会重置 TIMx_CNT 数值为 0 重新计数。 而在 TIMxCNT 计数的同时,TIMxCNT 的计数值X会与比较寄存器TIMx_CCR 预先存储了的数值 A 进行比较,当脉冲计数器 TIMx_CNT 的数值X小于比较寄存器 TIMx_CCR 的值A时,输出高电平(或低电平),相反地,当脉冲计数器的数值X大于或等于比较寄存器的值 A 时,输出低电平(或高电平)。 如此循环,得到的输出脉冲周期就为重载寄存器 TIMx_ARR 存储的数值 (N+1) 乘以触发脉冲的时钟周期,其脉冲宽度则为比较寄存器 TIMx_CCR 的值 A 乘以触发脉冲的时钟周期,即输出PWM的占空比为 A/(N+1) 。 12.4 PWM配置步骤 1.开启TIM3时钟、GPIOB时钟和复用功能时钟 2.配置GPIOB5为复用输出 3.设置TIM3_CH2重映射到PB5上 4.初始化TIM3,设置ARR和PSC 5.设置TIM3_CH2的PWM模式 6.使能TIM3的CH2输出 7.使能TIM3 8.在主函数中改变占空比完成呼吸灯 12.5 定时器引脚复用功能映射 根据以上重映像表,我们使用定时器3的通道2作为PWM的输出引脚,所以需要对PB5引脚进行配置。注意:如果使用PB4当做TIM3部分重映射的CH1输出,除了要进行部分重映射配置外,还需要禁用JTAG!并在开启复用时钟后禁用JTAG! GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE); //禁用JTAG,在开启复用时钟后禁用 1. 新建两个文件,pwm.c 和 pwm.h 2. 在头文件 pwm.h 添加下面代码: #ifndef _PWM_H #define _PWM_H #include "stm32f10x.h" void PWM_Init(u16 arr, u16 psc); #endif; 3. 把 pwm.c 添加到工程中 4. 在 pwm.c 中添加以下代码: #include "pwm.h" void PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO结构体 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义TIMx定时器结构体 TIM_OCInitTypeDef TIM_OCInitStructure; //定义定时器脉宽调制结构体 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //使能TIM3时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);//使能GPIOB时钟和AFIO复用时钟 GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE); //TIM3部分重映射 TIM3_CH2->PB5 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; //配置输出速率 GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIOB TIM_TimeBaseStructure.TIM_Period = arr; //设置自动重装载寄存器周期的值 arr=value-1 TIM_TimeBaseStructure.TIM_Prescaler = psc; //设置预分频值 psc=value-1 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure); //初始化TIMx时间基数 //初始化TIM3 Channel2 PWM模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能比较输出 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高 TIM_OC2Init(TIM3,&TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2 TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器 TIM_Cmd(TIM3, ENABLE); //使能TIM3 } 5. 实现PWM呼吸灯功能 #include "stm32f10x.h" #include "delay.h" #include "led.h" #include "tim.h" #include "key.h" #include "pwm.h" int main(void) { u16 pwmValue = 0; u8 dir = 0; delay_init(); PWM_Init(999, 719); while(1) { if(dir) { if(pwmValue > 550) TIM_SetCompare2(TIM3, --pwmValue); else dir = 0; } else { if(pwmValue < 990) TIM_SetCompare2(TIM3, ++pwmValue); else dir = 1; } delay_ms(3); } } 小提示:如果身边没有LED电阻面包板搭电路,可以用杜邦线连接PB5和PC13,同时PC13设置成开漏输出(GPIO_Mode_Out_OD),这样就能完成呼吸灯实验了(不瞒你说我也是这样干的)。 

史海拾趣
|
觉得还可以,拿出来和大家分享。搜索了下坛子里没有的,大家看看: 目 录 第1章: 探头-测量质量的关键环节………………………………………… 什么是探头…………………………………………………………………… 理想的探头………… ...… 查看全部问答> |
|
编者按:不久前曾发表了。那是一个带有4路立体声输入,一路输出的红外遥控音源切换器兼PC遥控器的DIY制作。因其带有音源切换功能所以要用的元件较多,电路也较复杂,对于一般缺乏电子制作经验的PCDIYer来说是有一定难度的。其实在国外的DIY网站也有 ...… 查看全部问答> |
|
该程序是实现012345-123450-234501-345012-450123-501234-012345的循环表示 library IEEE; use IEEE.std_logic_1164.all; use IEEE.std_logic_unsigned.all; use ieee.std_logic_arith.all; entity disp_inturn is port( ...… 查看全部问答> |
|
实现得功能是应用层窗口点击GPJ哪个脚高或低驱动对应就把GPJ引脚拉高或低。我功能能够完全实现,不过有个地方不解:拉低必须是在输入模式才行(rGPGCON &= ~0xffff),配成输出模式也拉不下去,rGPGUP是配好了的当要拉低的时候rGPGUP是disable的, ...… 查看全部问答> |
|
在wince下能不能捕捉到全局鼠标事件啊?原来是想用钩子的,结果试了下,发现好像wince下面没有鼠标钩子,有没有哪位达人能告诉我到底有没有办法啊! 具体需求:做一个触摸屏的背光控制,当发现一段时间没有点击后自动关闭背光。如果有做过的兄弟有 ...… 查看全部问答> |
|
要读写USB设备的数据 m_hDevice= CreateFile(DevInterface.DevicePath(),GENERIC_READ |GENERIC_WRITE,FILE_SHARE_READ | FILE_SHARE_WRITE,NULL,OPEN_EXISTING,0,NULL); 已经获得句柄 WriteFile(m_hDevice,szWriteBuffer,dwWriteByte,&dwWriteL ...… 查看全部问答> |