


PLC使用脉冲方式控制伺服电机
2021-09-18 来源:elecfans
PLC是怎么控制伺服电机的?
在回答这个问题之前,首先要清楚伺服电机的用途,相对于普通的电机来说,伺服电机主要用于精确定位,因此大家通常所说的控制伺服,其实就是对伺服电机的位置控制。其实,伺服电机还用另外两种工作模式,那就是速度控制和转矩控制,不过应用比较少而已。
速度控制一般都是有变频器实现,用伺服电机做速度控制,一般是用于快速加减速或是速度精准控制的场合,因为相对于变频器,伺服电机可以在几毫米内达到几千转,由于伺服都是闭环的,速度非常稳定。转矩控制主要是 控制伺服电机的输出转矩,同样是因为伺服电机的响应快。应用以上两种控制,可以把伺服驱动器当成变频器,一般都是用模拟量控制。
伺服电机最主要的应用还是定位控制,位置控制有两个物理量需要控制,那就是速度和位置,确切的说,就是控制伺服电机以多快的速度到达什么地方,并准确的停下。
伺服驱动器通过接收的脉冲频率和数量来控制伺服电机运行的距离和速度。比如,我们约定伺服电机每10000个脉冲转一圈。如果PLC在一分钟内发送10000个脉冲,那么伺服电机就以1r/min的速度走完一圈,如果在一秒钟内发送10000个脉冲,那么伺服电机就以60r/min的速度走完一圈。
所以,PLC是通过控制发送的脉冲来控制伺服电机的,用物理方式发送脉冲,也就是使用PLC的晶体管输出是最常用的方式,一般是低端PLC采用这种方式。而中高端PLC是通过通讯的方式把脉冲的个数和频率传递给伺服驱动器,比如Profibus-DP CANopen,MECHATROLINK-II,EtherCAT等等。这两种方式只是实现的渠道不一样,实质是一样的,对我们编程来说,也是一样的。这也就是我想跟大家说的,要学习原理,触类旁通,而不是为了学习而学习。
对于程序编写,这个差别很大,日系PLC是采用指令的方式,而欧系PLC是采用功能块的形式。但实质是一样的,比如要控制伺服走一个绝对定位,我们就需要控制PLC的输出通道,脉冲数,脉冲频率,加减速时间,以及需要知道伺服驱动器什么时候定位完成,是否碰到限位等等。无论哪种PLC,无非就是对这几个物理量的控制和运动参数的读取,只是不同PLC实现方法不一样。
PLC使用脉冲方式控制伺服电机
在自动化项目开发的过程中,进行一些高精度的定位控制。选用伺服电机作为执行器件可快速实现高精度控制系统的构建。
伺服电机作为常用的控制电机,其控制方式已变得多样。如使用脉冲控制,模拟量控制,总线控制等。在一般的常规运用中,使用脉冲控制方式依然是很多人喜欢的选用方式。使用脉冲方式控制伺服电机典型控制接线图如下:
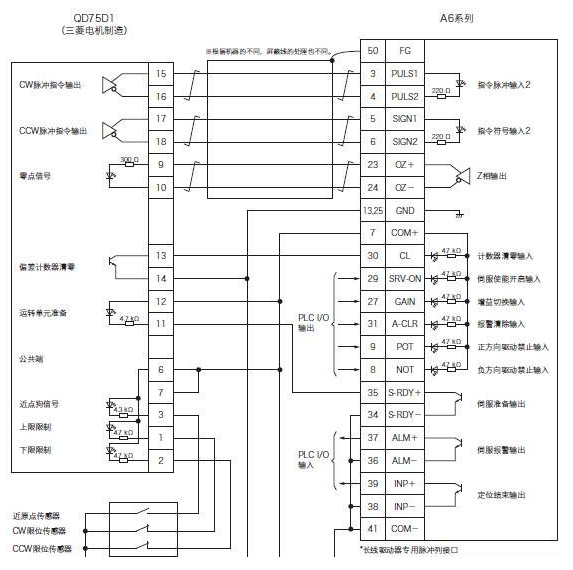
PLC与伺服电机控制接线图
PLC使用高速脉冲输出端口,向伺服电机的脉冲输入端口发送运行脉冲信号。伺服电机使能后,PLC向伺服电机发送运行脉冲,伺服电机即可运行。针对伺服脉冲输入端口的接线方式,可以依照PLC侧输出端口的方式,进行如下处理:
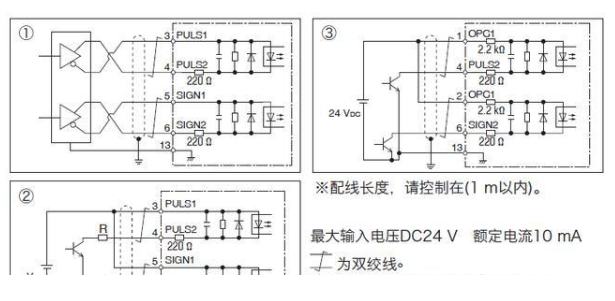
高速脉冲接线方式
方式1,若PLC信号为差分方式输出,则可以使用方式1,其优点信号抗干扰能力强,可进行远距离传输。若驱动器与PLC之间的距离较远,则推荐使用此种方式。
方式2,PLC侧采用漏型输出。日系PLC多采用此种方式接线,如三菱。
方式3,PLC侧采用源型输出。欧系PLC多采用此种方式接线,如西门子。
在控制脉冲的形式上,有如下几种方式:
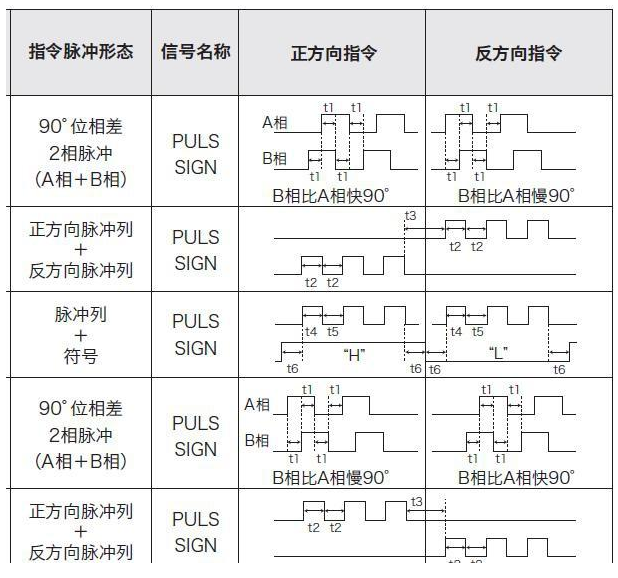
控制脉冲形式
主要为,AB相脉冲,脉冲+方向,正反向脉冲。
AB相脉冲:A相与B相脉冲的相位相差90°。若A相领先于B相90°,则电机正向运行;若B相领先于A相90°,则电机反向运行。
脉冲+方向:脉冲控制电机的运行。通过脉冲数量实现定位控制,接收脉冲的速度实现电机运行速度的控制。方向信号实现电机正反转运行控制。
正反向脉冲:正向运行信号控制电机的正向运行,脉冲数量控制定位位置,脉冲速度控制定位速度;反向运行信号控制电机的反向运行。
综合以上三种方式,PLC控制伺服电机的位置由发送给伺服电机的脉冲量确定,控制伺服电机的速度由发送给伺服电机的脉冲速度确定。
上一篇:步进电机使用过程中的异常处理
下一篇:工业以太网网络规划原则
-

PX4固件二次开发课程
-

RISC-V嵌入式系统开发
-

NuttX Workshop 2024
-

自己动手写操作系统
-

SOC系统级芯片设计实验
-

自己动手做一台计算机
-

家用电源无载自动断电装置的设计与制作
-

用数字电路CD4069制作的万能遥控轻触开关
-

使用ESP8266从NTP服务器获取时间并在OLED显示器上显示
-

开关电源的基本组成及工作原理
-

用NE555制作定时器
-

带有短路保护系统的5V直流稳压电源电路图