


基于Simulink永磁同步电机调速系统的仿真
2024-08-22 来源:elecfans
1 、永磁同步电机
永磁同步电动机(PermanentMagnets Synchronous Motor,PMSM),转子采用永磁材料,定子为短距分布式绕组,采用三相正弦波交流电驱动。PMSM具有直流电动机的特性,有稳定的起动转矩,可以自行起动,并可类似直流电动机对电机进行闭环控制,多用于伺服系统和高性能的调速系统。

永磁同步电机其本身是一个转子使用永磁铁来产生磁场,定子上通过三相交流绕组的同步电动机,它有定子、转子、转子位置传感器和逆变电路等结构部件来构成的,对于有些永磁电机转子位置传感器是否需要安装取决于工程的需要和成本的考虑问题。
2 、永磁同步电机的控制原理
目前对永磁同步电机的控制技术主要有磁场定向矢量控制技术(FieldOrientation Control,FOC)与直接转矩控制技术(directtorque control,DTC)。在这里我们使用磁场定向矢量控制技术来建立永磁同步电机的仿真模型。
磁场定向矢量控制技术的核心是在转子旋转坐标系中针对激磁电流id和转矩电流iq分别进行控制,并且采用的是经典的PI线性调节器,系统呈现出良好的线性特性,可以按照经典的线性控制理论进行控制系统的设计,逆变器控制采用了较成熟的SPWM、SVPWM等技术。磁场定向矢量控制技术较成熟,动态、稳态性能较佳,所以得到了广泛的实际应用。
直接转矩控制的实现方法是:计算得到磁链和转矩的实际值与参考值之间的偏差,通过滞环比较以及当前定子磁链的空间位置确定控制信号,在离线计算的开关表中选取合适的空间电压矢量,再通过离散的bang-bang控制方式调制产生PWM信号,以控制逆变器产生合适的电压和电流驱动电机转动。直接转矩控制摒弃了复杂的空间矢量坐标运算,电机的数学模型得到了简化,控制结构也简单,对电机参数变化不敏感,控制系统的动态性能得到了极大提高。然而有利也有弊,直接转矩控制逆变器的开关频率不固定;转矩、电流脉动大;采样频率也非常高。
3 、永磁同步电机控制系统的数学模型
永磁同步电机的方程包括电机的电压方程、运动方程、电流方程和转矩方程等等,这些方程是其数学模型的基础。被控对象的数学模型建立能够很准确地反应出被控对象的不同的各种特性能是非常的关键的。使其跟踪目标值随意变化的随动控制系统叫做伺服控制系统,以物体的运动方向、运动位置、运动速度等作为被控对象。这种伺服驱动控制,是典型机电一体化系统的重要组成部分,输入的功率因数要高,输出的负载阻抗要低;永磁同步电机的暂态响应要迅速,同时要有较高的稳态精度;永磁同步电机可靠性要好,在安全的前提下,电机的运行要经济、高效;电机要抗电磁干扰,防止因电磁干扰而影响电能的效能;永磁同步电机要向智能化方向发展。因传统的频率可调的电机,多采用的是用模拟电路控制电源的技术,要实现较高的要求是很困难的,为了我们能够很方便的分析,我们假定:
(1)磁路不饱和,电机电感不受电流变化影响,不计涡流和磁滞损耗;
(2)忽略齿槽、换相过程和电枢反应的影响;
(3)三相绕组对称,永久磁钢的磁场沿气隙周围正弦分布;
(4)电枢绕组在定子内表面均匀连续分布;
(5)驱动二极管和续流二极管为理想元件;
(6)转子磁链在气隙中呈正弦分布。
4 、控制系统的仿真模型
采用的是最简单的id=0的控制方法。id=0时,从电动机端口看,永磁同步电机相当于一台他励的直流电动机,定子电流中只有交轴分量,而且定子磁动势空间矢量与永磁体磁动势空间矢量正交,电动机转矩中只有永磁转矩分量。因为电磁转矩仅仅依赖交轴电流,从而实现了转矩表达式中的交直轴电流解耦。仿真模型如下图所示:

控制模型主要包括转速给定部分,比例积分(PI)模块,坐标转换模块,逆变器控制模块,以及电动机模块。下面进行一一介绍。
4.1、转速给定模块
转速给定模块使用Simulink中的常数(constant)模块,单位为rpm。

4.2、比例积分模块
调速系统实施转速闭环控制,转速比例积分调节器中的比例模块设置比例参数,积分模块设置积分参数。调节器内同时设置了内限幅和外限幅模块(saturation)。

4.3、坐标转换模块
根据上述坐标转换原理,我们建立dq到abc坐标系和abc到dq坐标系的转换模块。

4.4、逆变器控制模块
采用电流滞环脉冲宽度调制方法,该模块输入为三相相电流给定值和三相相电流实际值,输出为三相相电压。

4.5、电动机模块
在Simulink中对永磁同步电机进行仿真建模通常采用以下几种方法:
(1)在Simulink中内部提供的PMSM模型,它包含在电力系统库的电动机库中。这种方法简单,方便,适于快速创建永磁同步电动机调速系统,但由于模型已经封装好,不能随意修改,同时也不方便研究PMWM内部的建模方法。
(2)使用SimulinkLibrary库里已有的分离模块进行组合搭建电机模型,该方法思路清晰、简单、直观,但需要较多的模块,连线较多且不利于差错,尤其是复杂的数学模型。因此,本方法适用于简单的、小规模系统的仿真系统建模。

5 、仿真结果与分析
输出矩阵:
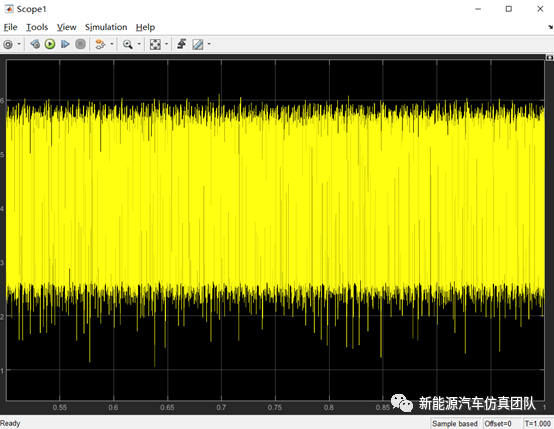
输出三相电流:

输出角速度信号:

输出id,iq:

由仿真结果可以看出,在起动过程中,电动机转矩上升到最大值以后保持在限幅值,此过程中电动机的转速迅速上升。加速结束后,电动机进入稳态运行,电动机的电磁转矩与负载转矩平衡。电气传动系统的响应很快,这是因为控制系统中的电流闭环控制响应比较快,动态性能好。
- 新的 MathWorks 支持从 MATLAB 和 Simulink 模型到高通 Hexagon 神经处理单元架构的自动化代码生成
- MathWorks 宣布推出 MATLAB 和 Simulink 的 2024b 版本 加速信号处理应用开发的新 App 和功能
- 利用Simulink自动生成STM32串口代码
- 永磁同步电机控制系统仿真—PWM比较器的Simulink模型
- 永磁同步电机控制系统仿真—SVPWM算法的Simulink模型
- 永磁同步电机控制系统仿真—FOC控制算法的Simulink模型
- 主要讨论PWM比较器的Simulink模型
- SVPWM算法的Simulink模型介绍
- FOC控制算法的Simulink模型
- GD32E230C-FOC电机控制解决方案
-

PX4固件二次开发课程
-

RISC-V嵌入式系统开发
-

NuttX Workshop 2024
-

自己动手写操作系统
-

SOC系统级芯片设计实验
-

自己动手做一台计算机
-

家用电源无载自动断电装置的设计与制作
-

PIC单片机控制的遥控防盗报警器电路
-

使用ESP8266从NTP服务器获取时间并在OLED显示器上显示
-

开关电源的基本组成及工作原理
-

RS-485基础知识:处理空闲总线条件的两种常见方法
-

基于TDA2003的简单低功耗汽车立体声放大器电路