



历史上的今天
今天是:2024年09月16日(星期一)
2018年09月16日 | STM32对码盘的正交信号处理
2018-09-16 来源:eefocus
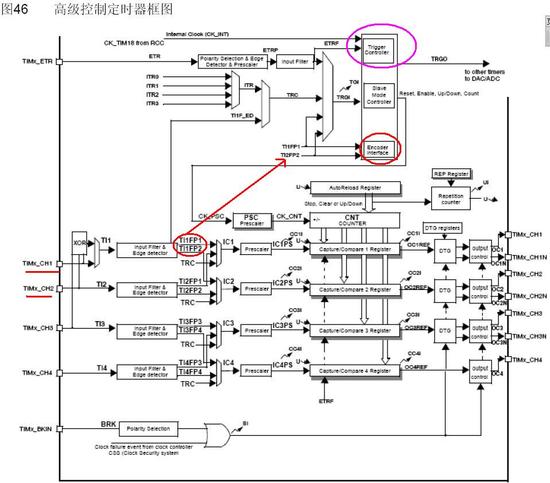
STM32的每个TIMER都有正交编码器输入接口,TI1,TI2经过输入滤波,边沿检测产生TI1FP1,TI2FP2接到编码器模块,通过配置编码器的工作模式,即可以对编码器进行正向/反向计数。
如下图,编码器使用了A,B两相信号,但是我只需要对TI1信号进行计数(第一行),我也是刚发现了这个错误,原来对两个信号都计数,导致码盘转一周得到不止100个脉冲(100线的光电码盘)。通过STM32的编码器模块比较两想的电平信号就可以很容易地计算出编码器的运行情况了。

下面是调试OK的代码:
void Encoder_Configration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
//PC6 A相 PC7 B相
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC,&GPIO_InitStructure);
/* Enable the TIM3 Update Interrupt */
/*NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = TIMx_PRE_EMPTION_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = TIMx_SUB_PRIORITY;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);*/
/* Timer configuration in Encoder mode */
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // No prescaling
TIM_TimeBaseStructure.TIM_Period = 10000;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM8, TIM_EncoderMode_TI12,
TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 6;//ICx_FILTER;
TIM_ICInit(TIM8, &TIM_ICInitStructure);
// Clear all pending interrupts
TIM_ClearFlag(TIM8, TIM_FLAG_Update);
TIM_ITConfig(TIM8, TIM_IT_Update, ENABLE);
//Reset counter
TIM2->CNT = 0;
TIM_Cmd(TIM8, ENABLE);
}
n_Counter = TIM_GetCounter(TIM8);
Diled_Disp_Num((float)n_Counter);
另外一个值得注意的问题是,STM32 的定时器是16位的,意思是只能计数到65535,有两种方法,一是采用链式的方式用两个定时器将16位扩展为32位,还有一种简单的方法就是开启定时器的溢出中断,每中断一次就代表编码器运转了特定的角度。
比如编码器是400线的,将ARR寄存器设置为400,每溢出中断一次就代表电机转了一圈,以此类推。
另外,关于输入脉冲的检测,其实是类似的,只不过在STM32内部是专门用了一个外部触发模块来实现的,如图一中紫色框的标注,编码器模块应该是在这个模块上的升级,下面是配置代码:
void TIM3_ETR_GetDropCounts_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
//test PA0 TIM8_ETR
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x00;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // Time base configuration
TIM_ETRClockMode2Config(TIM3, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_NonInverted, 0);
TIM_SetCounter(TIM3, 0);
TIM_Cmd(TIM3, ENABLE);
}
上一篇:stm32编码器的接口模式
史海拾趣
|
1 引言 汽车仪表是驾驶员与汽车的信息交流界面,对汽车安全以及经济行驶具有重要作用。近年来,随着汽车电子技术的发展,汽车仪表显示信息也不断增加,而传统机械指针式汽车组合仪表则无法满足现在使用需求。特别是计算机、微电子和 ...… 查看全部问答> |
|
extern ROMChain_t *OEMRomChain; 这段编译错误 在eboot main.c 添加 multibin xip 过程中, 添加 InitRomChain() 函数中,引用了 全局变量 extern ROMChain_t *OEMRomChain; OEMRomChain 指针对应是 public\\common\\oak\\inc\\Bcoemglobal.h 文件中 #define OEMRomChain g_pOemGlobal->pRO ...… 查看全部问答> |
|
个人求有PHS基站控制器软件开发经验辅导老师(可兼职,深圳) 本人欲从事PHS基站控制器软件开发,因无此方面的经验,想请位有这方面经验的辅导老师。 主要工作是帮助本人分析一个现有PHS基站控制器软件源程序,然后修正程序中的一些BUG。 时间方面可以是灵活按排(工作日、业余均可),报酬可以按时/日/周/月等 ...… 查看全部问答> |
|
请问linuxlogo默认是在左上角显示的,现在要求显示到右下角,并且企鹅图像倒置 相当于把默认显示转180度,请问这个哪里可以改。 可以修改fbcon.c吗?新人求救!!… 查看全部问答> |
|
各位大侠们,麻烦帮忙看看这个例子,是我毕业设计的题目,由于单片机C编程学得不精,这几天一直在调程序都没法调出来,还请各位大虾们帮帮忙!万分感激!!! 硬件实现功能: 1、从机U2按键按下,在本机显示,同时将按键值送往主机U1,在主机显示 ...… 查看全部问答> |
|
中*美*爱*梯*科*技, .NET外企软件工程师班将于2007年9月10日开课, 开课第一周免费试听, 欢迎大家踊跃报名参加! 中*美*爱*梯*科*技向学员郑重承诺: 百分之百保证就业, 月薪3000——8000, 就不了业者退还全部学费! ...… 查看全部问答> |
|
1,#define IS_GPIO_MODE(MODE) (((MODE) == GPIO_Mode_AIN) || ((MODE) == GPIO_Mode_IN_FLOATING) || ;请问这个加了红色背景的是什么意思;特别是IS—是什么意思,后面这一句是什么意思… 查看全部问答> |