



历史上的今天
今天是:2025年01月17日(星期五)

2019年01月17日 | LPC1788启动代码分析
2019-01-17 来源:eefocus
在Keil uVision4中新建一个基于NXP1788的工程后,会提示添加启动汇编代码startup_LPC177x_8x.S。该文件进行从汇编到C语言运行环境的初始化工作。
;/*****************************************************************************
; * @file: startup_LPC177x_8x.s
; * @purpose: CMSIS Cortex-M3 Core Device Startup File
; * for the NXP LPC177x_8x Device Series
; * @version: V1.20
; * @date: 07. October 2010
; *------- <<< Use Configuration Wizard in Context Menu >>> ------------------
; *
; * Copyright (C) 2010 ARM Limited. All rights reserved.
; * ARM Limited (ARM) is supplying this software for use with Cortex-M3
; * processor based microcontrollers. This file can be freely distributed
; * within development tools that are supporting such ARM based processors.
; *
; * THIS SOFTWARE IS PROVIDED "AS IS". NO WARRANTIES, WHETHER EXPRESS, IMPLIED
; * OR STATUTORY, INCLUDING, BUT NOT LIMITED TO, IMPLIED WARRANTIES OF
; * MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE APPLY TO THIS SOFTWARE.
; * ARM SHALL NOT, IN ANY CIRCUMSTANCES, BE LIABLE FOR SPECIAL, INCIDENTAL, OR
; * CONSEQUENTIAL DAMAGES, FOR ANY REASON WHATSOEVER.
; *
; *****************************************************************************/
;
;
;
Stack_Size EQU 0x00000200 ;开辟一块大小为Stack_Size的栈空间
AREA STACK, NOINIT, READWRITE, ALIGN=3
;AREA伪指令用于定义代码段和数据段,后跟属性标号。“READWRITE”表示可读写 “READONLY”只读。
;根据数据手册知可读写段保持在SRAM区,起始地址为0x1000 0000,堆栈保存在SRAM空间。
;只读段保存在Flash区,起始地址为0x0000 0000,代码中的中断向量表保存在Flash空间
;在0x0000 0000 存放的是栈顶的地址__initial_sp(即0x1000 0200),在0x0000 0004 存放的是Reset_Handler的地址
Stack_Mem SPACE Stack_Size
__initial_sp ;标号__initial_sp指向栈顶位置
;
;
;
Heap_Size EQU 0x00000400 ;定义堆空间大小为Heap_Size?
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base
Heap_Mem SPACE Heap_Size
__heap_limit
PRESERVE8
THUMB
;cortex-M3规定起始地址必须存放栈顶地址即__initial_sp,紧接着存放复位入口地址,
;这样内核复位后就会自动从起始地址的下32位取出复位地址执行复位中断服务函数。
; Vector Table Mapped to Address 0 at Reset
AREA RESET, DATA, READONLY
EXPORT __Vectors
__Vectors DCD __initial_sp ; Top of Stack ;建立中断向量表Vectors
DCD Reset_Handler ; Reset Handler
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler
; External Interrupts
DCD WDT_IRQHandler ; 16: Watchdog Timer
DCD TIMER0_IRQHandler ; 17: Timer0
DCD TIMER1_IRQHandler ; 18: Timer1
DCD TIMER2_IRQHandler ; 19: Timer2
DCD TIMER3_IRQHandler ; 20: Timer3
DCD UART0_IRQHandler ; 21: UART0
DCD UART1_IRQHandler ; 22: UART1
DCD UART2_IRQHandler ; 23: UART2
DCD UART3_IRQHandler ; 24: UART3
DCD PWM1_IRQHandler ; 25: PWM1
DCD I2C0_IRQHandler ; 26: I2C0
DCD I2C1_IRQHandler ; 27: I2C1
DCD I2C2_IRQHandler ; 28: I2C2
DCD SPIFI_IRQHandler ; 29: SPIFI
DCD SSP0_IRQHandler ; 30: SSP0
DCD SSP1_IRQHandler ; 31: SSP1
DCD PLL0_IRQHandler ; 32: PLL0 Lock (Main PLL)
DCD RTC_IRQHandler ; 33: Real Time Clock
DCD EINT0_IRQHandler ; 34: External Interrupt 0
DCD EINT1_IRQHandler ; 35: External Interrupt 1
DCD EINT2_IRQHandler ; 36: External Interrupt 2
DCD EINT3_IRQHandler ; 37: External Interrupt 3
DCD ADC_IRQHandler ; 38: A/D Converter
DCD BOD_IRQHandler ; 39: Brown-Out Detect
DCD USB_IRQHandler ; 40: USB
DCD CAN_IRQHandler ; 41: CAN
DCD DMA_IRQHandler ; 42: General Purpose DMA
DCD I2S_IRQHandler ; 43: I2S
DCD ENET_IRQHandler ; 44: Ethernet
DCD MCI_IRQHandler ; 45: SD/MMC card I/F
DCD MCPWM_IRQHandler ; 46: Motor Control PWM
DCD QEI_IRQHandler ; 47: Quadrature Encoder Interface
DCD PLL1_IRQHandler ; 48: PLL1 Lock (USB PLL)
DCD USBActivity_IRQHandler ; 49: USB Activity interrupt to wakeup
DCD CANActivity_IRQHandler ; 50: CAN Activity interrupt to wakeup
DCD UART4_IRQHandler ; 51: UART4
DCD SSP2_IRQHandler ; 52: SSP2
DCD LCD_IRQHandler ; 53: LCD
DCD GPIO_IRQHandler ; 54: GPIO
DCD PWM0_IRQHandler ; 55: PWM0
DCD EEPROM_IRQHandler ; 56: EEPROM
IF :LNOT::DEF:NO_CRP
AREA |.ARM.__at_0x02FC|, CODE, READONLY
CRP_Key DCD 0xFFFFFFFF
ENDIF
AREA |.text|, CODE, READONLY
; Reset Handler
Reset_Handler PROC
EXPORT Reset_Handler [WEAK] ;EXPORT用于声明全局性
IMPORT SystemInit ;复位后先后调用SystemInit() main()
IMPORT __main
LDR R0, =SystemInit
BLX R0
LDR R0, =__main
BX R0
ENDP
; Dummy Exception Handlers (infinite loops which can be modified)
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
ENDP
HardFault_Handler\
PROC
EXPORT HardFault_Handler [WEAK]
B .
ENDP
MemManage_Handler\
PROC
EXPORT MemManage_Handler [WEAK]
B .
ENDP
BusFault_Handler\
PROC
EXPORT BusFault_Handler [WEAK]
B .
ENDP
UsageFault_Handler\
PROC
EXPORT UsageFault_Handler [WEAK]
B .
ENDP
SVC_Handler PROC
EXPORT SVC_Handler [WEAK]
B .
ENDP
DebugMon_Handler\
PROC
EXPORT DebugMon_Handler [WEAK]
B .
ENDP
PendSV_Handler PROC
EXPORT PendSV_Handler [WEAK]
B .
ENDP
SysTick_Handler PROC
EXPORT SysTick_Handler [WEAK]
B .
ENDP
Default_Handler PROC
EXPORT WDT_IRQHandler [WEAK]
EXPORT TIMER0_IRQHandler [WEAK]
EXPORT TIMER1_IRQHandler [WEAK]
EXPORT TIMER2_IRQHandler [WEAK]
EXPORT TIMER3_IRQHandler [WEAK]
EXPORT UART0_IRQHandler [WEAK]
EXPORT UART1_IRQHandler [WEAK]
EXPORT UART2_IRQHandler [WEAK]
EXPORT UART3_IRQHandler [WEAK]
EXPORT PWM1_IRQHandler [WEAK]
EXPORT I2C0_IRQHandler [WEAK]
EXPORT I2C1_IRQHandler [WEAK]
EXPORT I2C2_IRQHandler [WEAK]
EXPORT SPIFI_IRQHandler [WEAK]
EXPORT SSP0_IRQHandler [WEAK]
EXPORT SSP1_IRQHandler [WEAK]
EXPORT PLL0_IRQHandler [WEAK]
EXPORT RTC_IRQHandler [WEAK]
EXPORT EINT0_IRQHandler [WEAK]
EXPORT EINT1_IRQHandler [WEAK]
EXPORT EINT2_IRQHandler [WEAK]
EXPORT EINT3_IRQHandler [WEAK]
EXPORT ADC_IRQHandler [WEAK]
EXPORT BOD_IRQHandler [WEAK]
EXPORT USB_IRQHandler [WEAK]
EXPORT CAN_IRQHandler [WEAK]
EXPORT DMA_IRQHandler [WEAK]
EXPORT I2S_IRQHandler [WEAK]
EXPORT ENET_IRQHandler [WEAK]
EXPORT MCI_IRQHandler [WEAK]
EXPORT MCPWM_IRQHandler [WEAK]
EXPORT QEI_IRQHandler [WEAK]
EXPORT PLL1_IRQHandler [WEAK]
EXPORT USBActivity_IRQHandler [WEAK]
EXPORT CANActivity_IRQHandler [WEAK]
EXPORT UART4_IRQHandler [WEAK]
EXPORT SSP2_IRQHandler [WEAK]
EXPORT LCD_IRQHandler [WEAK]
EXPORT GPIO_IRQHandler [WEAK]
EXPORT PWM0_IRQHandler [WEAK]
EXPORT EEPROM_IRQHandler [WEAK]
WDT_IRQHandler
TIMER0_IRQHandler
TIMER1_IRQHandler
TIMER2_IRQHandler
TIMER3_IRQHandler
UART0_IRQHandler
UART1_IRQHandler
UART2_IRQHandler
UART3_IRQHandler
PWM1_IRQHandler
I2C0_IRQHandler
I2C1_IRQHandler
I2C2_IRQHandler
SPIFI_IRQHandler
SSP0_IRQHandler
SSP1_IRQHandler
PLL0_IRQHandler
RTC_IRQHandler
EINT0_IRQHandler
EINT1_IRQHandler
EINT2_IRQHandler
EINT3_IRQHandler
ADC_IRQHandler
BOD_IRQHandler
USB_IRQHandler
CAN_IRQHandler
DMA_IRQHandler
I2S_IRQHandler
ENET_IRQHandler
MCI_IRQHandler
MCPWM_IRQHandler
QEI_IRQHandler
PLL1_IRQHandler
USBActivity_IRQHandler
CANActivity_IRQHandler
UART4_IRQHandler
SSP2_IRQHandler
LCD_IRQHandler
GPIO_IRQHandler
PWM0_IRQHandler
EEPROM_IRQHandler
B .
ENDP
ALIGN
; User Initial Stack & Heap
IF :DEF:__MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory
EXPORT __user_initial_stackheap
__user_initial_stackheap
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
END
程序完成如下内容的工作:
开辟一块大小为Stack_Size的栈空间;
标号__initial_sp指向栈顶位置;
定义堆空间大小为Heap_Size;
建立中断向量表Vectors,cortex-M3规定起始地址必须存放栈顶地址即__initial_sp,紧接着存放复位入口地址,这样内核复位后就会自动从起始地址的下32位取出复位地址执行复位中断服务函数。
Reset_Handler复位中断函数中先EXPORT声明Reset_Handler的全局性,然后分别执行外部的函数SystemInit和__main。
下面对汇编程序中的几个关键字做说明:
AREA伪指令:用于定义代码段和数据段,后跟属性标号。其中“READWRITE”表示可读写,“READONLY”只读属性。根据LPC1788的数据手册描述的存储介质,可知可读写段保持在SRAM区,起始地址为0x1000 0000,代码中的堆栈保存在SRAM空间。只读段保存在Flash区,起始地址为0x0000 0000,代码中的中断向量表保存在Flash空间。 因此可以总结出,在0x0000 0000 存放的是栈顶的地址__initial_sp(即0x1000 0200),在0x0000 0004 存放的是Reset_Handler的地址。
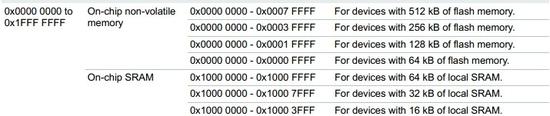
图1:LPC1788 地址映射

图2: debug中 0地址的值0x1000 0200 即栈顶地址, 0x0000 0004 地址值为0x0000 00F9(看反汇编可知该值 即Reset_Handler的入口如下图)。

DCD指令:开辟内存空间,中断向量表建立中使用相当于C语言中的函数指针,每个成员都是函数指针,指向各个中断服务函数。
自此分析了LPC1788的启动,主要包括堆栈初始化,和中断向量表的初始化。LPC1788有内部Flash,所以上点从内部Flash启动,内部Flash的起始地址为0x0000 0000,存放栈顶的地址0x1000 0200。 0x0000 0004存放复位中断的入口地址。LPC1788复位后,从0x0000 0004取出复位入口地址,执行中断复位函数,从而跳转到SystemInit和main C语言函数执行。
史海拾趣
|
我正在做一个温度计,需要使用到HT1620/21,前一段搭了一个电路,使用的HT1621,但是无论如何调整驱动程序(示波器观察基本是正确的),HT1621就是没有动静:振荡器没有波形;COM、seg没有波形。 谁遇到过这样的问题? 下面是硬件原理图 ...… 查看全部问答> |
|
此篇文章为转载,谢谢原著者分享 就跟我自己承诺的一样,我会发一篇关于zigbee串口通信的。虽然这个是我五月份就做的东西,但是现在看来,还是有那么一群人对这个纠缠不清。但是,这个其实很简单。 事实上zigbee协议栈2006是有自己集成好 ...… 查看全部问答> |
|
【WEBENCH设计】基于TPS54229E设计的12V转5V电源设计(实物测试) 【转】 【方案介绍】 在使用51单片机做开发设计的年代,一个7805电源管理芯片是比不可少的东西,这个最大输出电流可达1A的线性稳压器是我们刚开始学51时最先接触到的电源芯片,另外一个就是赫赫有名的117 ...… 查看全部问答> |
|
两年之前使用过CCS,但是当时考虑太简单,仅仅是会编程下载,一些使用的技巧没有把握住,今年夏天有重新捡起这个软件,发现这个软件确实有很多很好的调试方法。因为一些基本的功能大家都会使用我就不就一些 ...… 查看全部问答> |
|
本帖最后由 雨中 于 2014-9-29 21:57 编辑 作者:Irvin Ou 最近,超大规模集成(VLSI)技术的发展扩宽了数字控制应用范围,尤其是在电源电子元件方面的应用。 数字控制IC具有多种优势,比如裸片尺寸更小、无源元件数量更少、成本更低。 另外,数 ...… 查看全部问答> |