



历史上的今天
今天是:2025年02月15日(星期六)
2019年02月15日 | V2X可能比自动驾驶来的都要晚
2019-02-15 来源:雅斯顿

很多成功来自创新,同时很多失败来自超前的创新。自动驾驶在一定程度上正在犯类似的错误,人们对自动驾驶的憧憬过于美好,这种美好恰恰超前于现实过多,导致无法真正落地实施。有朝一日,人类会不会突然意识到整个自动驾驶思路可能正在走向一个死胡同。
其中比较典型的就是V2X车联网。
关于自动驾驶,整个业界并没有一个完整且确切的发展方向,许多势力认为自动驾驶量产需要大量配套设施,也有部分势力认为自动驾驶应该建立在目前大量普适的现实之上,让汽车变得更智能,否则自动驾驶便失去了量产意义。
基于美国人对自动驾驶过早过多的进行了研究,最终他们相信V2X会是一种可行性思路,他们认为V2X会在根本上解决人类对自动驾驶安全的担忧问题。
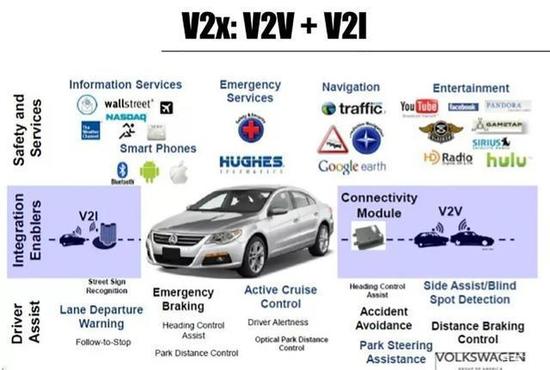
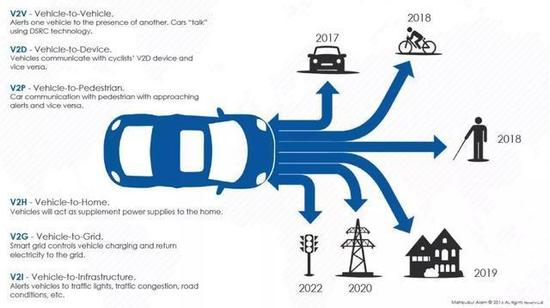
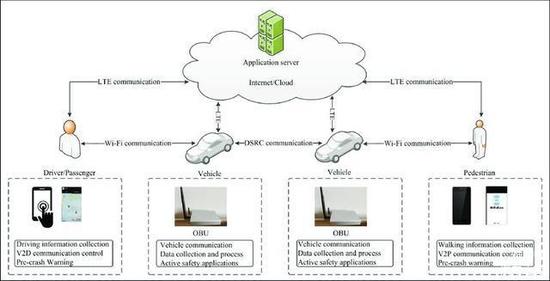
V2X主要由V2V和V2I两个部分组成,车与车互联和车与基础设施互联。V2V是车辆和车辆之间相互传递速度、制动、油耗等数据,彼此交换各自意图,保障更加畅通的道路状况,V2I则是基础设施里的道路标线、交通信息以及交通信号灯和车辆信息的一种交换。
V2V不仅彻底地解决了车辆碰撞的安全问题,同时还可能大量提高通行效率和降低碳排放。正是由于具备了提前预知前车运行状况的能力,所以车辆可以更加合理得规划城市道路行驶时的速度和制动,避免不必要的刹车和加速,从而起到节约的目的。
V2I同样非常具备诱惑力,一旦红绿灯连接上网络,车辆便可以自行计算行驶时间和速度,通过红绿灯频次估算,实现一路绿灯的可能,还可以通知车主自主选择更为便捷的道路。

从这个层面,V2X为所有人描绘了一幅理想的景象,但这种景象的背后需要人类付出特别大的代价,也因此导致其未必真的能到来,这也会让V2X成为一个超前于现实的失败者。
2V2X的弊端
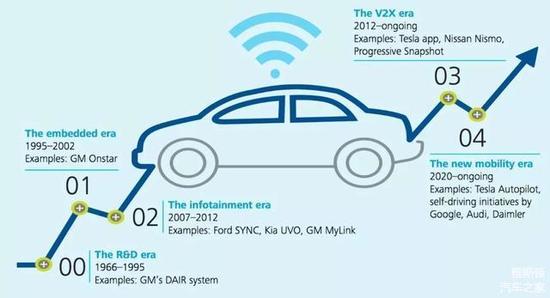
V2X的想法虽然很美好,但这种想法其实在20世纪初就产生了,为此,通用汽车和美国政府都进行了大量的实验,最初汽车行业是受到信息革命的影响,迫切希望让一切硬件都具备通讯的能力,显然对V2X的憧憬来自“远古”时代,对自动驾驶是一种“更过去”对“更未来”的一种“过时”想法。
虽然这套想法在量产中遇到种种障碍,但当人们看到政府和企业不计成本在小范围内实现完全自动驾驶的模型方案时,人们往往会抑制不住激动的心情,认为未来随着“摩尔定律”的发展,这种设施会变得越来越小,越来越廉价,从而实现量产。
另外一个问题是,V2X真正发挥功效的前提是市面上大多数车辆都配备了V2X设备,只有当道路上搭载V2X的车辆越来越多时,V2X才不会变得那么尴尬。因此,V2X第一件事儿就是解决市场化,可是市场化对于前期销售的V2X车辆是不公平的,因为起初的V2X车辆并不会立即体验到应当的服务。
3V2X的应用
伴随着云计算的到来,V2X虽然可以取代短波信息传递的方式,从而依靠网络实现云计算,大幅度地降低车辆V2X设备的成本,但基于V2X信息传递的标准,至今也没有统一的概念,这涉及到不同国家、不同车企不同的道路规则。

在漫长自动驾驶发展的过程中,人类在很长的一段时间内会是驾驶的关键角色,尤其是车辆智能系统的驾驶技术超越人类之前,政府和车企是绝对不会允许智能系统实现比人类更高的控制权限,这也就决定了V2X只能对人类司机发出警告,而一旦人类司机不能及时的做出反应,那么V2X的效益便约等于零。

因此V2X如果只是在人类驾驶辅助阶段入场,那V2X对人类的提示其实并没有太多意义,而V2X真正的意义在于车辆首先具备自动驾驶能力之后。

具备完全自动化的车辆可以在第一时间处理V2X的数据,建立明确的信息体系,这会是一套更加“顺理成章”的逻辑。在这一系列接近“完美”的假设之后,我们方才看到V2X真正的能量,也就说V2X只有车辆具备了自动驾驶之后才能发挥出最大功效。
只是这一系列接近“完美”的假设都是不太可能实现的障碍,为此V2X在目前来看,能否顺利量产并大量运用都是很大的一个问题。

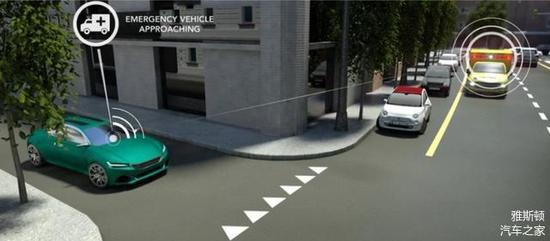
“集群只能带来巨大的社会效益:以冰封路面为例,通过启动ABS防抱死制动系统,同时根据外界温度,顺利检测突发状况并实时预警。将来,我们能更精确地辨别交通拥堵,极大降低事故风险。当系统感应到红绿灯亮起时,为广大车辆提供信息导航,帮助其选择最佳油门,节能环保。”

史海拾趣
|
0 引言 无线局域网(WLAN,Wireless Local Area Networks)是计算机网络技术与无线电通信技术结合的产物,是在有线局域网的基础上发展起来的。与有线局域网相比,无线局域网采用的是无线链路 (Cable-free link)构成网络。局域网广泛应用于办公自 ...… 查看全部问答> |
|
请教高手!WINCE6 编译生成 bootimage.nb0不能运行 各位大侠,我是新手,请教一下出了什么问题: 我搭建的环境是XP+VS2005+PB6,在编译后生成了文件bootimage.nb0且没有报错,但是将此程序通过JTAG烧写到开发板后就是跑不起来,串口也没有输出。 怀疑是在打包生成bootimage.nb0时出了问题,但不知是 ...… 查看全部问答> |
|
ATmega系列的AVR单片机已经很熟了,也做了不少东西,最近找工作给一些名词弄糊涂了 “ARM单片机”到底是啥意思? 网上查了下,是不是ARM7内核的,和单片机差不多,用单片机编程方法编程的? “ARM嵌入式系统”这个更糊涂,是不是要用Linux和winC ...… 查看全部问答> |
|
程序如下: #include <avr/io.h>#include <avr/interrupt.h>#include <util/delay.h> int main(void){ DDRD=0xff; PORTD=0xff; MCUCR|=(1<<ISC00); GICR|=(1<<INT0); &n ...… 查看全部问答> |
|
Stellaris Firmware 6852 (2011.01.11) Released 早上例行巡视了一些站台,发现Stellaris作了更新具体改进可详见Release Note,大概是can bus效率改良及一些小修正 下载:http://www.luminarymicro.com/products/software_updates.html… 查看全部问答> |
|
看过RF2500 pdf的重点总结: 1. 四线串行配置和数据接口:CC2500 通过4 线SPI 兼容接口(SI,SO,SCLK和CSn)配置。这个接口同时用作写和读缓存数据。SPI 接口上所有的地址和数据转换最先在重要的位上处理。 &nb ...… 查看全部问答> |
|
在使用利尔达的M4开发板时使用UART1串口进行中断接收和中断发送,但是发送不会进入中断程序,程序只会将缓冲里面第一个字节发送出去后就完事了,中断接收则正常。下面是配置程序: // // 配置Uart引脚,(PA0 ...… 查看全部问答> |
|
使用codewarrior 10.2 开发 飞思卡尔 M4 K10 入门 使用codewarrior 10.2 开发 飞思卡尔 M4 K10 怎么入门啊疑问:1.飞思卡尔 M4的库是表示我不全?2.野火M4的库怎么移植到codewarrior 10.2中?3。如何在codewarrior 10.2中进行软件仿真?谢谢!… 查看全部问答> |
|
2月13日在TI的在线商城买了个PGA309的套件,不知道什么原因被取消了怎么办?钱是用支付宝付的,也没见支付宝有退款。也不知道为什么取消订单,有没有类似经历的朋友能指点一下吗? … 查看全部问答> |