



历史上的今天
今天是:2025年04月08日(星期二)
2019年04月08日 | 关于IIC通信协议的理解
2019-04-08 来源:eefocus
前段时间,一直在调SDRAM与VGA的驱动,搞了很长一段时间,参考了很多资料,最终终于思路理清了,不过鉴于手上没有相关的硬件电路,所以暂时搁置了,回归正题,先来看IIC之间的通信吧。
首先,IIC通信与UART,还有SPI统称为串行接口通信,不过它们之间还是有区别的,如UART的负电平逻辑,还有UART通信不需要时钟,只需要特定的波特率即可,SPI与IIC都可以有一个主机,多个从机的情况,不过IIC适用于短距离传输,如片间通信,摄像头的配置等场景。
要搞定IIC首先来看IIC的硬件接口:
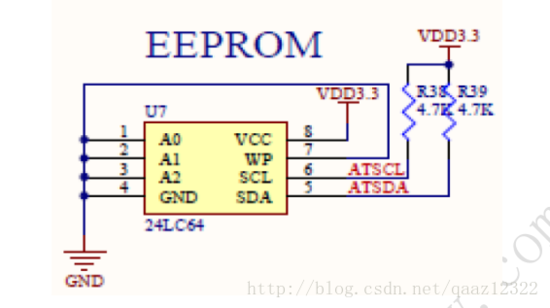
如图所示,我们知道IIC一个主机可以悬挂多个从机,所以地址线A2,A1,A0 可以实行片选的功能,那么WP这个引脚的功能就是当WP悬空或者接地的时候,表示这时的EEPROM既可以读,也可以写,当WP接电源时,则只可以读而不能写。
SCL与SDL这两个引脚,必须上拉,否则驱动能力不够,无法进行正常的IIC通信。
OK,硬件接口已经介绍清楚了,那么我们现在开始来看协议了。
首先IIC分为字节读写和页面读写,首先来看字节读写的协议:

如上图所示,如果我们要向EEPROM中写入一个字节的数据,得有如下几个步骤:
1.开始信号——在SCLK的高电平器件,拉低SDA的信号(由1 变为0)。
2.控制字节——即器件地址,就是你操作那一块EEPROM。
3.ACK信号——由从机发出,主机为接收,所以在此阶段,sda_link必须置为0,即为读取这个应答信号,所以在SCLK的高点平期间。
4.字节地址——即某一块EEPROM里面的哪一个地址。
5.ACK信号——与上述相同。
6.数据信号——即你往某个地址里面写入的8位数据。
7.ACK信号——上述相同。
8.结束信号——在SCLK的高电平期间,拉高SDA信号,表示通信结束。
再来看读的时序:

由上图可看出读时序的前面处理方式与写相同,不同的时在第三个ACK信号来了之后,如果是读,那么会又有一个起始信号,紧接着读器件地址,然后应答,再然后读数据,再然后在SCLK的低电平期间发送一个NO ACK信号,要记住这个信号由主机发出,然后紧接着一个结束信号。
由上述读写时序我们可知,通信的起始均在SCLK的高电平期间发生跳变,这就据定了我们其他信号跳变均在SCLK的下降沿,SCLK高电平期间数据稳定,适用于读(即低电平改变数据,高电平采集数据)。
具体过程如下:
首先板子上电来个初始化需要来个延时,具体多少用计数器自己搞定。
代码如下:
reg [6:0] hadware_initial_delay;
wire hadware_initial_delay_done;
always@(posedge clk or negedge rst_n)
if(!rst_n)
hadware_initial_delay<=7’d0;
else
if(hadware_initial_delay<=7’d49)
hadware_initial_delay<=hadware_initial_delay+1;
else
hadware_initial_delay<=hadware_initial_delay;
assign hadware_initial_delay_done=(hadware_initial_delay==7’d50)?1’b1:1’b0;
OK,我们要知道IIC的速率一般就几百KH而我们的系统时钟为50M,所以需要分频:
代码如下:
reg [8:0] sclk_cnt;
always@(posedge clk or negedge rst_n)
if(!rst_n)
sclk_cnt<=9’d0;
else
if(hadware_initial_delay_done)
begin
if(sclk_cnt<9’d499)
sclk_cnt<=sclk_cnt+1;
else
sclk_cnt<=0;
end
assign sclk=(sclk_cnt<=9’d249)?1’b1:1’b0;
OK,我们知道SCLK高电平期间采集数据,低电平期间改变数据,那么当然,这个“期间”肯定时时钟沿中间最好啦,毕竟更容易满足建立时间与保持时间,很稳定的。
具体代码如下:
wire sclk_posedge_middle=(sclk_cnt==9’d124)?1’b1:1’b0;
wire sclk_negedge_middle=(sclk_cnt==9’d374)?1’b1:1’b0;
OK,读写定义了那么多个过程,当然需要状态机来搞定啦,定义变量如下:
parameter IDLE = 4’d0 ;
parameter START1 = 4’d1 ;
parameter ADD1 = 4’d2 ;
parameter ACK1 = 4’d3 ;
parameter ADD2 = 4’d4 ;
parameter ACK2 = 4’d5 ;
parameter DATA = 4’d6 ;
parameter ACK3 = 4’d7 ;
parameter STOP1 = 4’d8 ;
parameter START2 = 4’d9 ;
parameter ADD3 = 4’d10;
parameter ACK4 = 4’d11;
parameter DATA_READ = 4’d12;
parameter NO_ACK = 4’d13;
parameter STOP2 = 4’d14;
OK,再来个宏定义,假设写入是这几个地址,这几个数据。
define DEVICE_READ 8'b1010_0001
define DEVICE_WRITE 8’b1010_0000
define WRITE_DATA 8'b0001_0001
define BYTE_ADDR 8’b0000_0011
SDA双向端口,这个记住,一般这样搞;
reg sda_link;
reg sda_out_r;
assign sda=sda_link?sda_out_r:1’bz;
当作为输出时,对吧,使sda_link拉高,作为输入时,输入高阻。
各过程如下:
reg [3:0] current_state;
//reg [3:0] next_state;
reg [7:0] db_r;
reg [3:0] num;
reg [7:0] data_out_reg;
always@(posedge clk or negedge rst_n)
if(!rst_n)
begin
sda_link<=0;
db_r<=0;
num<=0;
current_state<=IDLE;
sda_out_r<=0;
data_out_reg<=8’b0;
end
else
begin
case(current_state)
IDLE:begin
sda_out_r<=1;
sda_link<=1;
if(!sw1_r||!sw2_r)
current_state<=START1;
else
current_state<=IDLE;
end
START1:if(sclk_posedge_middle)
begin
sda_out_r<=0;
db_r<=`DEVICE_WRITE;
current_state<=ADD1;
end
else
current_state<=START1;
ADD1 :
if(sclk_negedge_middle)
begin
if(num==4'd8)
begin
sda_link<=0;
num<=0;
current_state<=ACK1;
sda_out_r<=1;
end
else
begin
current_state<=ADD1;
sda_out_r<=db_r[7-num];
num<=num+1;
end
end
else
current_state<=ADD1;
ACK1:
if(sclk_posedge_middle)
// begin
// if(!sda)
// begin
begin // */
current_state<=ADD2;
db_r<=`BYTE_ADDR;
end
else
current_state<=ACK1;
ADD2:begin
sda_link<=1;
if(sclk_negedge_middle)begin
if(num==4'd8)
begin
sda_link<=0;
current_state<=ACK2;
num<=4'd0;
sda_out_r<=1;
end
else
begin
num<=num+1;
current_state<=ADD2;
sda_out_r<=db_r[7-num];
end
end
else
current_state<=ADD2;
end
ACK2:
if(sclk_posedge_middle)
////begin
//if(!sda)
begin
if(!sw1_r)
begin
db_r<=`WRITE_DATA;
current_state<=DATA;
end
else
if(!sw2_r)
begin
current_state<=START2;
sda_out_r<=1;
end
end
else
current_state<=ACK2;
DATA: begin
sda_link<=1;
if(sclk_negedge_middle)
begin
if(num==4'd8)
begin
num<=4'd0;
current_state<=ACK3;
sda_out_r<=1;
sda_link<=0;
end
else
begin
num<=num+1;
current_state<=DATA;
sda_out_r<=db_r[7-num];
end
end
else
current_state<=DATA;
end
ACK3: if(sclk_posedge_middle)
// begin
// if(!sda)
current_state<=STOP1;
// end
STOP1:
begin
sda_link<=1;
sda_out_r<=0;
if(sclk_posedge_middle)
begin
sda_out_r<=1;
if(sw1_r)
// 你要是不等它松开才恢复初始状态,那么你一旦恢复初始状态SW1_r就为低电平,他又开始写了,所以为了避免重复写入数据。
current_state<=IDLE;
else
current_state<=STOP1;
end
else
current_state<=STOP1;
end
START2:begin
sda_link<=1;
if(sclk_posedge_middle)
begin
sda_out_r<=0;
sda_link<=1;
db_r<=`DEVICE_READ;
current_state<=ADD3 ;
end
end
ADD3: begin
if(sclk_negedge_middle)
begin
if(num==4'd8)
begin
num<=0;
sda_link<=0;
sda_out_r<=1;
current_state<=ACK4;
end
else
begin
num<=num+1;
sda_out_r<=db_r[7-num];
current_state<=ADD3;
end
end
else
current_state<=ADD3;
end
ACK4:
if(sclk_posedge_middle)
// begin
// if(!sda)
current_state<=DATA_READ;
else
current_state<=ACK4;
// end
DATA_READ:
begin
sda_link<=0;
if(sclk_posedge_middle)
begin
if(num==4'd8)
begin
sda_link<=1;
sda_out_r<=1;
current_state<=NO_ACK;
num<=4'd0;
end
else
begin
num<=num+1;
current_state<=DATA_READ;
data_out_reg[7-num]<=sda;
end
end
end
NO_ACK:
if(sclk_negedge_middle)
begin
sda_out_r<=1;
current_state<=STOP2;
end
else
current_state<=NO_ACK;
STOP2:begin
sda_out_r<=0;
sda_link<=1;
if(sclk_posedge_middle)
begin
sda_out_r<=1;
current_state<=IDLE;
end
else
current_state<=STOP2;
end
default:current_state<=IDLE;
endcase
end
assign data_out=data_out_reg;
endmodule
仿真结果如下:
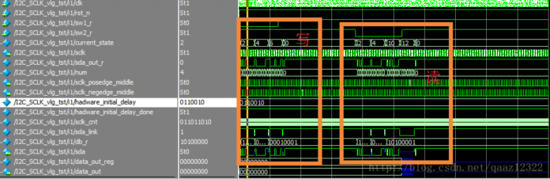
OK,搞定,输出当然可以连接数码管,连接LED等来显示是否正确。
史海拾趣
|
用串口收发数据,只要提高波特率,传输数据就出错,尤其是接收方,不知道是什么原因。 代码是C写的,查询方式。 比如红外用2400bps是好的,发01,02,03。。。20共20个数,接收都对,收到01,02,03,04,05,06一直到20. 但是改成4800bps之 ...… 查看全部问答> |
|
"已失去对设备的远程连接。请验证设备连接并重新启动调试 "???? PDA上从电脑上pull入一个数据表,然后PDA自己存入数据时出现 \"已失去对设备的远程连接。请验证设备连接并重新启动调试 \",程序会自动退出,没有出现其它异常报告。 PDA重启程序后,再往刚才的数据表里存储数据一切正常。每次都是刚从电脑上pull入 ...… 查看全部问答> |
|
各位大哥们,我还是一个大一的学生,现在听说嵌入开发还可以,所以就有一点想向这一方面发展,但是现在在我面前的一个问题就是 我不知道要学那些东西,我也是一个计算机班的学生,这是不是有很大的优点. 所以就想问一下大哥们的应该出什么方向入手好一 ...… 查看全部问答> |
|
我AD采样的范围是0 - 2.5 V , 采样肯定是小数, 其类型应该是 float 型吧? 假如其采样点储存在float型数组内, 经过一系列运算后 如何使其转换成十进制数据 输出? 是有固定程序么? 比如将其转换成BCD码! 还请高手指点!… 查看全部问答> |