



历史上的今天
今天是:2025年01月11日(星期六)
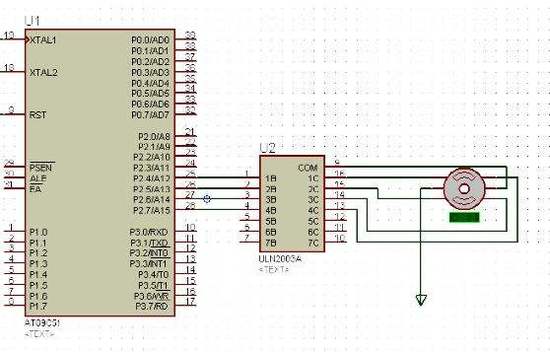
2020年01月11日 | PIC单片机对步进电机的控制设计
2020-01-11 来源:elecfans
pIC16f874步进电机程序
listp=16f874
include
;--==*[CONSTANTS]*==--
#defineCOMMAND_2’B’
#defineCOMMAND_3’C’
#defineCOMMAND_4’D’
;--==*[VARIABLES]*==--
cmdNumequ0x20;commandnumber.0xFFforinvalidcommand
recByteequ0x21;receivedbyte
motorLequ0x22;motordata-lowbyte
motorHequ0x23;motordata-highbyte
byteCntequ0x24;internalcounterforbytecountingduringrecepTIon
TIckLequ0x25;TIcks:lowbyte
TIckHequ0x26;ticks:highbyte
result1Lequ0x27;result:thisoneisneededforstorageofticks
result1Hequ0x28
winkelLequ0x29;winkel:tickcounterwithoutoverflowchecketc.
winkelHequ0x30
quadequ0x31;quadraturesignal,fordirectionstorage
oldbequ0x32;oldvalueofPORTB
newbequ0x33;newvalueofPORTB
tmr0o0equ0x34;tmr0overflowcounter0
tmr0o1equ0x35;tmr0overflowcounter1
wtemp1equ0x60;storagefortheWregister(rbif)
wtemp2equ0x61;storagefortheWregister(CCp2if)
wteMP3equ0x62;storagefortheWregister(rcif)
wtemp4equ0x63;storagefortheWregister(usarterrorroutines)
org0x00;--==*[RESETVECTOR]*==--
bmain
org0x04;--==*[INTVECTOR]*==--
bint_handler
org0x05;--==*[MAINPROGRAM]*==--
main:
;--==*[VARIABLES-initialize]*==--
MOVlw0xFF
MOVwfcmdNum
clrfmotorL
clrfmotorH
clrftickL
clrftickH
clrfresult1L
clrfresult1H
clrfwinkelL
clrfwinkelH
clrfquad
clrfoldb
clrfnewb
clrftmr0o0
clrftmr0o1
;--==*[PORTS-setupportB]*==--
clrfPORTB
bsfSTATUS,RP0;PIN4and5asinput(photo-interruptersignals)
MOVlwb’00110000’;pin1hastobeanoutput(directionsignal)
MOVwfTRISB;allotherpinsareoutputs,too(default)
bcfSTATUS,RP0
;--==*[PORTS-setupportC]*==--
clrfPORTC
bsfSTATUS,RP0
MOVlwb’11111011’;pin2asoutput(PWMsignal)
MOVwfTRISC;pins6and7havetobeinputs(default)
bcfSTATUS,RP0;allotherpinsareinputs,too(default)
;--==*[CCP1-setupPWMModule]*==--
bsfSTATUS,RP0
MOVlwd’249’;pwmperiod(calculatedwithformula)
MOVwfPR2
bcfSTATUS,RP0;dutycycle=0
clrfCCPR1L;CCPR1Lisupper8(bit:9.。.2)bitsofdutycycle
MOVlwb’00000101’;enabletimer2(bit:2)andsetprescaleof1:4(bit:0-1)
MOVwfT2CON;timer2isimportantforpwmoperation!
MOVlwb’00001111’;selectpwmmodeforccp1module(bit:0-3)
MOVwfCCP1CON;andresetlowertwobitsofdutycycle(bit:4-5)
;--==*[USART-setup]*==--
bsfSTATUS,RP0
MOVlw0x40;configurebaudgeneratorregister(calculatedwithformula)
MOVwfSPBRG;with:9600baud,noparity,8databits,nohandshake
MOVlwb’00100100’;enabletrasmit(bit:5)andhighspeedbaudrate(bit:2)
MOVwfTXSTA
bcfSTATUS,RP0
MOVlwb’10010000’;enableserialport(bit:7)andcontinuousreception(bit:4)
MOVwfRCSTA
clrw;w=0
MOVwfRCREG;resetUARTreceiverandfifo
MOVwfRCREG;soweCANavoidreceive/framing/overrunerrorsatthebeginning
MOVwfRCREG
MOVwfTXREG;justincase:thetxifflagisnowvalid(=1;avoidsinfiniteloopsinsendByte)
;--==*[TIMER0-setup]*==--
bsfSTATUS,RP0;thisistricky;prescalerhastobeassignedtotheWDT,
;incaseyouwanttoachieve1:1prescale
bcfOPTION_REG,PS0;first,setprescalerto1:2
bcfOPTION_REG,PS1
bcfOPTION_REG,PS2
bsfOPTION_REG,PSA;then,assignprescalertowdt;nowwehavea1:1prescalefortimer0:-)
bcfOPTION_REG,T0SE
bcfOPTION_REG,T0CS
bcfSTATUS,RP0
;--==*[INTERRUPTS-setup]*==--
bsfSTATUS,RP0
clrfPIE1
bsfPIE1,RCIE;enable“receivebyte”interrupt
bcfSTATUS,RP0
clrfINTCON;resetallinterruptflags
bsfINTCON,RBIE;enable“interruptonchange”interrupt
bsfINTCON,T0IE;enable“timer0overflow”interrupt
bsfINTCON,PEIE;enableperipheralinterrupts
bsfINTCON,GIE;enableglobalinterrupts
;--==*[MAINLOOP]*==--
loop:
bloop
;--==*[sendByte-ROUTINE]*==--
sendByte:;sendbyte(whichisstoredinW)
sendByte_l0:;waituntilnewdataarrivedintxreg
btfssPIR1,TXIF;(inDICatedviatransmitinterruptflagbit:txif)
bsendByte_l0
sendByte_l1:
MOVwfTXREG;sendnewdata
return
;--==*[INTERRUPTHANDLINGROUTINE]*==--
int_handler:
btfscRCSTA,OERR;overflowerroroccured,handleit
berr_Overflow
btfscRCSTA,FERR;framingerroroccured,handleit
berr_Frame
btfscPIR1,RCIF;receiveinterrupt:rcif
bint_USART_receive
btfscINTCON,RBIF;pininterrupt:rbif
bint_RB_change
btfscINTCON,T0IF;tmr0interrupt:t0if
bint_timer0_reset
retfie
int_RB_change:
incftickL,1;incrementticks(lowbyte)
btfscSTATUS,Z
incftickH,1;incrementticksonoverflow(highbyte)
incfwinkelL,1;sameastick,butwillnotbereset(eichungswert)
btfscSTATUS,Z
incfwinkelH,1
MOVwfwtemp1;saveW
MOVfwPORTB
MOVwfnewb;newb=PORTB
MOVlwb’00110000’;andmask
andwfoldb,1;resetallbitsexcept4and5
andwfnewb,1;resetallbitsexcept4and5
clrfquad;resetquadvalue
clrw;oldb==00?
subwfoldb,W
bzo00
MOVlwb’00010000’;oldb==01?
subwfoldb,W
bzo01
MOVlwb’00100000’;oldb==10?
subwfoldb,W
bzo10
bo11;else,oldb==11
o00:
MOVlwb’00010000’;newb==01?
subwfnewb,W
bnzquit
bsfquad,7;left
bquit
o01:
MOVlwb’00110000’;newb==11?
subwfnewb,W
bnzquit
bsfquad,7;left
bquit
o10:
clrw;newb==00?
subwfnewb,W
bnzquit
bsfquad,7;left
bquit
o11:
MOVlwb’00100000’;newb==10?
subwfnewb,W
bnzquit
bsfquad,7;left
quit:
MOVfwPORTB
MOVwfoldb;oldb=PORTB
MOVfwwtemp1;restoreW
bcfINTCON,RBIF;resetinterrupt(important)
retfie
int_timer0_reset:
btfsctmr0o0,7;wait128overflows
gotoa1
incftmr0o0,1
gotoa0
a1:
btfsctmr0o1,6;wait64overflows
gotoa4
incftmr0o1,1
gotoa0
a4:
btfscPORTB,7;ashorthack,sowecanmeasuretheimpulses
gotonext1;oftimer0withanoscillograph
bsfPORTB,7;signalisonbit7ofportb
gotomainl
next1:
bcfPORTB,7
mainl:
MOVwfwtemp2;saveW
MOVfwtickL;storeticksinresult1
MOVwfresult1L
MOVfwtickH
MOVwfresult1H
MOVfwquad;andblendthedirectionbitonMSBofresult1
iorwfresult1H,1
clrftickH;cleartickcounter
clrftickL
clrftmr0o0;cleartimer0overflowcounters
clrftmr0o1
MOVfwwtemp2;restoreW
a0:
bcfINTCON,T0IF;resetinterrupt(important)
retfie
int_USART_receive:
MOVwfwtemp3;saveW
MOVlwCOMMAND_3;command3active?
subwfcmdNum,W
bzgetData_command3;yes,handleit
MOVfwRCREG;storereceivedbyte
clrfRCREG;it’sagoodideatoflushthebuffer
clrfRCREG;afterreceivingabyte,soit’s
clrfRCREG;forcedthatwehaveanewbyteinthebufferinthenextstep
MOVwfrecByte
MOVlwCOMMAND_2;-executecommand2?
subwfrecByte,W
bzcommand2;yes,doit
MOVlwCOMMAND_3;-executecommand3?
subwfrecByte,W
bzcommand3;yes,doit
MOVlwCOMMAND_4;-executecommand4?
subwfrecByte,W
bzcommand4;yes,doit
commandUnknown:;else,receivedbyteisunknown
bsfPORTB,0;showerroronLEDs
MOVfwwtemp3;restoreW
retfie
;--==*[COMMANDEXEC-transmitmotordataindebugmode]*==--
command2:
MOVfwresult1H
callsendByte
MOVfwresult1L
callsendByte
MOVfwwinkelH
callsendByte
MOVfwwinkelL
callsendByte
MOVfwwtemp3;restoreW
retfie
;--==*[COMMANDINIT-setupforreceivemotordata(part1/2)]*==--
command3:;command3
MOVlwCOMMAND_3
MOVwfcmdNum;cmdNumcontainsnowthecurrentcommandvalue
MOVlw.2
MOVwfbyteCnt;wewantexactly2bytesfromthepc
MOVfwwtemp3;restoreW
retfie
;--==*[COMMANDEXEC-receivemotordata(part2/2)]*==--
getData_command3:
decfbyteCnt,1;handlebytecounter
bzc3_b2;ifbytecounteris0thenitisthe2ndbyte
MOVfwRCREG;else,1stbytereceive
MOVwfmotorL;storeinmotorL
bouthere;andexit
c3_b2:
MOVfwRCREG;2ndbytereceive
MOVwfmotorH;storeinmotorH
MOVlw0xFF;resetcmdNumtoundefinedvalue(0xFF)
MOVwfcmdNum
;reconfigurePWM
MOVfwmotorH
MOVwfCCPR1L;storehighbyte(8;bits9-2)
bcfCCP1CON,CCP1Y
btfscmotorL,0;storelowbyte(2;bits0)
bsfCCP1CON,CCP1Y
bcfCCP1CON,CCP1X
btfscmotorL,1;storelowbyte(2;bits1)
bsfCCP1CON,CCP1X
btfssmotorL,2;motorL《2》bitissignificantformotordirection
bturn_left
bsfPORTB,1;turnmotorright
bouthere
turn_left:
bcfPORTB,1;turnmotorleft
outhere:
MOVfwwtemp3;restoreW
retfie
;--==*[COMMANDEXEC-transmitmotordata]*==--
command4:
MOVfwresult1H;transmithighbyte
callsendByte
MOVfwresult1L;transmitlowbyte
callsendByte
MOVfwwtemp3;restoreW
retfie
;--==*[ERRORHANDLING-fortheserialcommunication]*==--
err_Overflow:;handleoverflowerror
MOVwfwtemp4;saveW
bsfPORTB,7;showerroronleds(10)
bcfPORTB,6
bcfRCSTA,CREN;dISAblecontinuousreception
MOVfRCREG,W;flushreceivefifobuffer(3bytesdeep)
MOVfRCREG,W
MOVfRCREG,W
bsfRCSTA,CREN;reenablecontinuousreception
MOVfwwtemp4;restoreW
retfie
err_Frame:;handleframeerror
MOVwfwtemp4;saveW
bcfPORTB,7;showerroronleds(01)
bsfPORTB,6
MOVfRCREG,W;flushreceivefifobuffer(3bytesdeep)
MOVfRCREG,W
MOVfRCREG,W
MOVfwwtemp4;restoreW
retfie
end
上一篇:影响单片机功耗的因素有哪些
下一篇:PIC单片机虚拟串行通信设计
史海拾趣
|
车载/基地发射机 C331 可将突发现场的多个便携式数字图像发射机或直接接驳的摄像机的图像、声音信号接收复用后,利用一个频点进行实时远距传输,并可在有效信号覆盖范围内实现动中通,抗多径干扰能力强,传输质量稳定。该产品可广泛用于军队 ...… 查看全部问答> |
|
人们喜欢听歌,但为了不打扰他人或想自己静静的欣赏,由此耳塞诞生了。如今有人喜欢看书,特别是睡觉前,开着灯,不但照亮了自己也照亮了别人,这经常会影响他人睡眠。为此我想到发明一种眼镜,只要带上这种眼镜就可以在黑夜看书而不会影响他人。当 ...… 查看全部问答> |
|
请教一个CF问题,c#开发的,Shared Memory问题 各位,最近在6410的开发板上测试下shared memory,语言是c#,wince6.0,.net compact framework3.5, 测试下来发现内存在不停的变小,大概从36M下降到20多M【比较有规律的,每次少64k】,测试了几次,一次时间大概1个晚上,第二天发现wince的界面冻 ...… 查看全部问答> |
|
大伙或许对编译比较模糊 这是我对explorer编译时的观察记录 Build for Windows CE (Release) (Built on Apr 14 2005 13:54:39) File names: Build.log Build.wrn Build.err Build.dat BUILD: [Thrd:Sequence:Type ] Message B ...… 查看全部问答> |
|
受朋友所托帮他做个计数器,但是之前硬件方面的都没接触过,所以到这里来请教各位大侠,望不吝赐教,谢谢。 功能是这样的:有十条生产线,要统计每一条生产线上生产的产品个数(0-99),输入的方法就是按一下按钮,每按一次计数器值 ...… 查看全部问答> |
|
关于 wince设备调用web services(高手请进) 各位大侠: 小弟最近做了一个wince上的程序,要求与数据库实时传输数据,于是小弟就采用了部署web service中间层的做法。现在在模拟器上程序运行良好,但是当部署到真机上的时候问题就出现了。当web service返回一个DataSet的时候出 ...… 查看全部问答> |
|
TI于2007年8月2日厦门举办MSP430DAY,免费报名中 TI于2007年8月2日厦门举办MSP430DAY,免费报名中。 欢迎广大单片机爱好者及技术爱好者参加,免费报名中。 请参考网站http://www.morrihan.com.cn/msp430.htm 欢迎大家参加,也可发送邮件到dennyzheng@morrihan.com.cn报名。或致电021-58369345 ...… 查看全部问答> |