



历史上的今天
今天是:2025年03月23日(星期日)
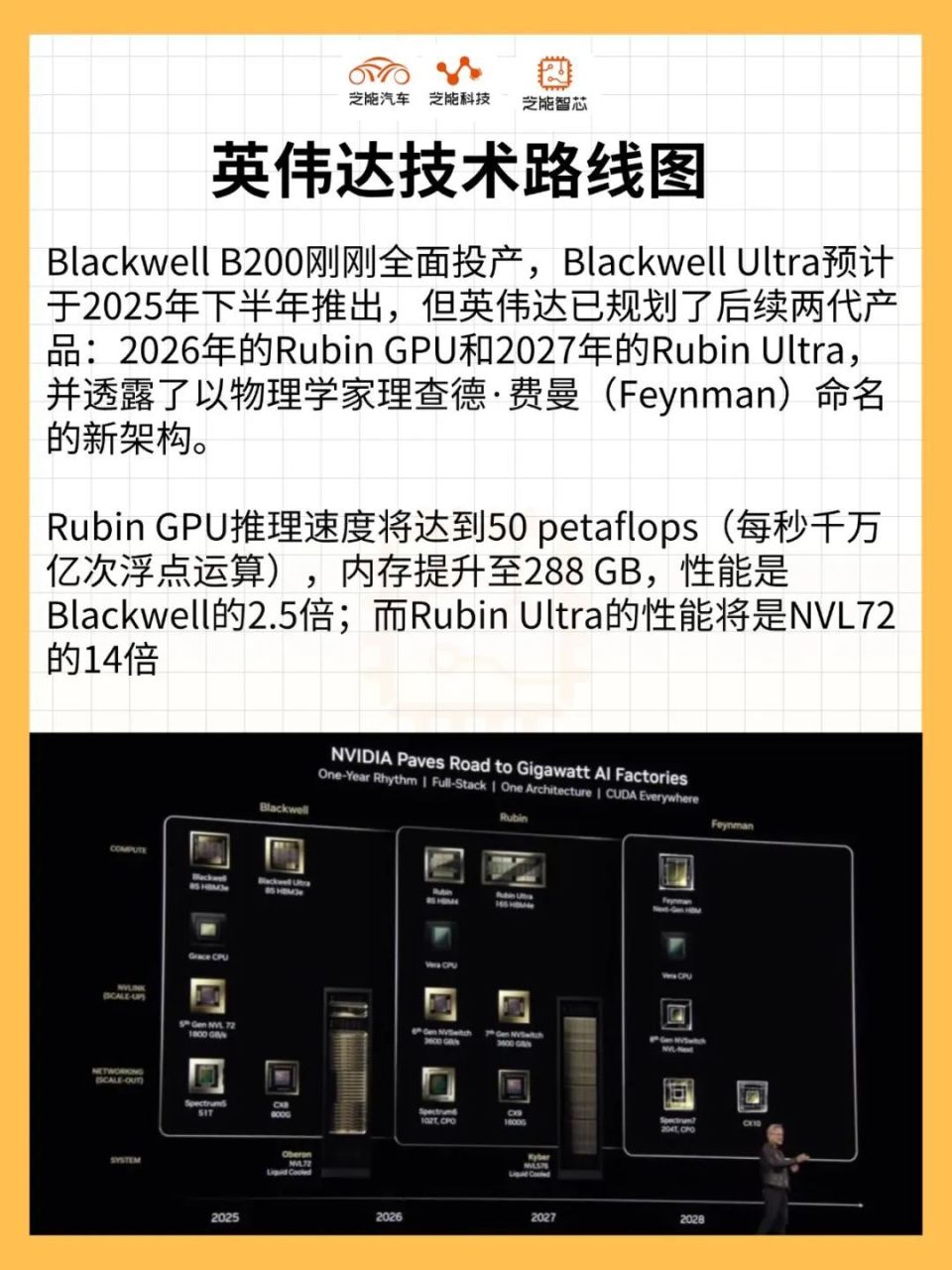
2020年03月23日 | 第013课 S3c2440代码重定位详解
2020-03-23 来源:eefocus
第001节段的概念重定位的引入
S3C2440的CPU可以直接给SDRAM发送命令、给Nor Flash发送命令、给4K的片上SDRAM发送命令,但是不能直接给Nand Flsh发送命令
假如把程序烧写到Nand Flsh上,即向Nand Flsh烧入* bin* 文件,CPU是无法从Nand Flsh中取代码执行的。
为什还可以使用NAND启动?
上电后,Nand启动硬件会自动把Nand Flsh前4K复制到SRAM;
CPU从0地址运行SRAM;
如果我的程序大于4K怎么办?
前4K的代码需要把整个程序读出来放到SDRAM(即代码重定位)。
如果从Nor Flash启动,会出现什么问题?
将拨动开关拨到Nor Flash启动时,此时CPU认为的 0地址 在Nor Flash上面,片内内存SRAM的基地址就变成了0x40000000(Nand启动时片内内存SRAM的基地址基地址是0),
由于Nor Flash特性:可以像内存一样读,但不能像内存直接写,因此需要把全局变量和静态变量重定位 放到SDRAM里。

例如执行如下几条汇编指令
MOV R0, #0
LDR R1, [R0] @读有效
STR R1, [R0] @写无效
当程序中含有需要写的全局变量或静态变量时,假如是在Nand Flash可以正常操作,如果是在Nor Flash,修改无效。因此我们需要把全局变量和静态变量重定位 放到SDRAM
#include "s3c2440_soc.h"
#include "uart.h"
#include "init.h"
char g_Char = 'A'; //定义一个全局变量
const char g_Char2 = 'B'; //定义固定的全局变量
int g_A = 0;
int g_B;
int main(void)
{
uart0_init();
while (1)
{
putchar(g_Char); /*让g_Char输出*/
g_Char++; /* nor启动时, 此代码无效 */
delay(1000000);
}
return 0;
}
编译运行查看是否有效果
查看sdram.dis文件 发现data数据段放在了0x00008474这个地址导致 程序太大
在makefile中加入这么一句话
arm-linux-ld -Ttext 0 ** -Tdata 0x700 ** start.o led.o uart.o init.o main.o -o sdram.elf
16进制的700就是十进制的2048
这时我们的bin文件就变为2049
烧写程序:
烧写在NORFlash 和 烧写在NANDFlash观察这两种的效果。
设置成NANDFlash启动没有问题 显示ABCDE…
设置成NORFlash启动显示AAA…
对于NOR启动时g_Char++; /* nor启动时, 此代码无效 */
Disassembly of section .data:
00000700 <__data_start>:
700: Address 0x700 is out of bounds. //数据段
Disassembly of section .rodata:
//放在只读数据段内
00000474 474: Address 0x474 is out of bounds. Disassembly of section .bss: //bss段 00000804 804: 00000000 andeq r0, r0, r0 00000808 808: 00000000 andeq r0, r0, r0 Disassembly of section .comment: 一个程序里面有 .text 代码段 .data 数据段 rodata 只读数据段(const全局变量) bss段 (初始值为0,无初始值的全局变量) commen 注释 其中bss段和commen 注释不保存在bin文件中。 第002节_链接脚本的引入与简单测试 前面程序运行,发现从Nand Flash启动和从Nor Flash启动表现是不一样的。 设置成Nand Flash启动没有问题 显示ABCDE… 设置成NOor Flash启动则显示AAA… 这是什么原因呢? 假如现在是Nor启动: Nor Flash就被认为是0地址,g_Char被放在0x700后面。CPU上电后从0地址开始执行,它能读取Nor Flash上的代码,打印出A,当进行g_Char++的时候,写操作操作无效,下次读取的数据仍然是A。 假如现在是Nor启动: 上电后,Nand Flash前4K代码就被自动的复制到SRAM里面,SRAM是CPU认为的0地址。CPU上电后从0地址开始执行,它读取SRAM上的代码,并g_Char++修改变量,下次读取的数据就依次增加了。 为了解决Nor Flash里面的变量不能写的问题,我们把变量所在的数据段放在SDRAM里面,看行不行。 修改Makefile 指定数据段为0x30000000 -Tdata 0x30000000: arm-linux-ld -Ttext 0 -Tdata 0x30000000 start.o led.o uart.o init.o main.o -o sdram.elf 这样的话编译出来的bin文件 从0地址 到 0x30000000地址 文件大小有700多MB,代码段和数据段直接有间隔,称之为黑洞 解决黑洞有两个办法: 第一个方法 把数据段的g_Char和代码段靠在一起; 烧写在Nor Flash上面; 运行时把g_char(全局变量)复制到SDRAM,即0x3000000位置(重定位); 第二个方法 让文件直接从0x30000000开始,全局变量在0x3……; 烧写Nor Flash上 0地址处; 运行会把整个代码段数据段(整个程序)从0地址复制到SDRAM的0x30000000(重定位); 这两个方法的区别是前者只重定位了数据段,后者重定位了数据段和代码段。 参考文档 [http://ftp.gnu.org/old-gnu/Manuals/ld-2.9.1/html_mono/ld.html Using LD, the GNU linker] 第一种办法如何实现 修改Makefile的代码段地址,使用链接脚本sdram.lds指定。 #arm-linux-ld -Ttext 0 -Tdata 0x30000000 start.o led.o uart.o init.o main.o -o sdram.elf arm-linux-ld -T sdram.lds start.o led.o uart.o init.o main.o -o sdram.elf 链接脚本的语法: SECTIONS { ... secname start BLOCK(align) (NOLOAD) : AT ( ldadr ) { contents } >region :phdr =fill ... } 我们需要依次排列 代码段、只读数据段、数据段、.bss段、.common。 其中数据段放在0x700,但运行时在0x3000000: SECTIONS { .text 0 : { *(.text) }//所有文件的.text .rodata : { *(.rodata) } //只读数据段 .data 0x30000000 : AT(0x700) { *(.data) } //放在0x700,但运行时在0x3000000 .bss : { *(.bss) *(.COMMON) }//所有文件的bss段,所有文件的.COMMON段 } 重新编译后烧写bin文件,发现启动后显示乱码。原因是我们从0x30000000处获取g_Char,但在这之前,并没有在0x30000000处准备好数据。因此需要重定位数据段,将0x700的数据移动到0x30000000处,在start.S加入: bl sdram_init /* 重定位data段 */ mov r1, #0x700 ldr r0, [r1] mov r1, #0x30000000 str r0, [r1] bl main 上面的这种方法,只能复制0x700处的一位数据,不太通用,下面写一个更加通用的复制方法: 链接脚本修改如下: SECTIONS { .text 0 : { *(.text) } .rodata : { *(.rodata) } .data 0x30000000 : AT(0x700) { data_load_addr = LOADADDR(.data); data_start = . ;//等于当前位置 *(.data) //等于数据段的大小 data_end = . ;//等于当前位置 } .bss : { *(.bss) *(.COMMON) } } 修改start.S bl sdram_init /* 重定位data段 */ ldr r1, =data_load_addr /* data段在bin文件中的地址, 加载地址 */ ldr r2, =data_start /* data段在重定位地址, 运行时的地址 */ ldr r3, =data_end /* data段结束地址 */ cpy: ldrb r4, [r1] //从r1读到r4 strb r4, [r2] //r4存放到r2 add r1, r1, #1 //r1+1 add r2, r2, #1 //r2+1 cmp r2, r3 //r2 r3比较 bne cpy //如果不等则继续拷贝 bl main 第003节_链接脚本的解析 链接脚本的语法 SECTIONS { ... secname start BLOCK(align) (NOLOAD) : AT ( ldadr ) { contents } >region :phdr =fill ... } 解释: secname :段名 start :起始地址:运行时的地址(runtime addr);重定位地址(relocate addr) AT ( ldadr ) :可有可无(load addr:加载地址) 不写时LoadAddr = runtime addr { contents } 的内容: start.o //内容为start.o文件 *(.text)所有的代码段文件 start.o *(.text)文件 elf文件格式 1 链接得到elf文件,含有地址信息(load addr) 2 使用加载器 :: 2.1 对于裸板是JTAG调试工具 :: 2.2 对于APP,加载器也是APP 把elf文件解析读入内存的加载地址 3 运行程序 4 如果loadaddr != runtimeaddr程序本身要重定位 核心程序运行时应该位于 runtimeaddr(reloate addr)或者链接地址 bin文件 1 elf生成bin文件 2 硬件机制启动 3 如果bin文件所在位置 不等于runtimeaddr ,程序本身实现重定位 bin文件/elf文件都不保存bss段 这些都是初始值为0 或者没有初始化的全局变量 程序运行时把bss段对应的空间清零 做个实验,把全局变量g_A以16进制打印出来 /* 0xABCDEF12 */ void printHex(unsigned int val) { int i; unsigned char arr[8]; /* 先取出每一位的值 */ for (i = 0; i < 8; i++) { arr[i] = val & 0xf; val >>= 4; /* arr[0] = 2, arr[1] = 1, arr[2] = 0xF */ } /* 打印 */ puts("0x"); for (i = 7; i >=0; i--) { if (arr[i] >= 0 && arr[i] <= 9) putchar(arr[i] + '0'); else if(arr[i] >= 0xA && arr[i] <= 0xF) putchar(arr[i] - 0xA + 'A'); } } //打印初始值为0的变量 int g_A = 0; int g_B; int main(void) { uart0_init(); puts("nrg_A = "); printHex(g_A); puts("nr"); 上述代码,没有清理bss段 g_A等于莫名奇妙的值 并不等于0 所以需要清理bss段 修改lds链接文件 SECTIONS { .text 0 : { *(.text) } .rodata : { *(.rodata) } .data 0x30000000 : AT(0x700) { data_load_addr = LOADADDR(.data); data_start = . ; *(.data) data_end = . ; } bss_start = .; //bss开始地址是当前位置 .bss : { *(.bss) *(.COMMON) } bss_end = .; //bss结束地址也是当前位置 } 修改start.s,清除bss段 /* 清除BSS段 */ ldr r1, =bss_start ldr r2, =bss_end mov r3, #0 clean: strb r3, [r1] add r1, r1, #1 cmp r1, r2 bne clean bl main halt: 现在的代码全局变量就是为0,通过几行代码,就可以少几十个甚至上千个全局变量的存储空间。 第004节_拷贝代码和链接脚本的改进 本节进行拷贝代码的改进和链接脚本的改进。 前面重定位时,需要ldrb命令从的Nor Flash读取1字节数据,再用strb命令将1字节数据写到SDRAM里面。 cpy: ldrb r4, [r1] /*首先从flash读出一个字节*/ strb r4, [r2] /*让后把数据写到SDRAM*/ add r1, r1, #1 add r2, r2, #1 cmp r2, r3 bne cpy JZ2440上的Nor Flash是16位,SDRAM是32位。 假设现在需要复制16byte数据, 采用ldrb命令每次只能加载1byte,因此CPU需要发出16次命令,内存控制器每次收到命令后,访问硬件Nor Flash,因此需要访问硬件16次; 同理,访问SDRAM时,CPU需要执行strb 16次,内存控制器每次收到命令后,访问硬件SDRAM,也要16次,这样总共访问32次。 现在对其进行改进,使用ldr从Nor Flash中读,ldr命令每次加载4字节数据,因此CPU只需执行4次,但由于Nor Flash是16位的,内存控制器每次收到CPU命令后,需要拆分成两次访问,因此需要访问硬件8次; 使用str写SDRAM,CPU只需执行4次,内存控制器每次收到命令后,直接硬件访问32位的SDRAM,因此这里只需要4次,这样总共访问只需要12次。 在整个操作中,花费时间最长的就是硬件访问,改进后代码,减少了硬件访问的次数,极大的提高了效率。 根据上面原理修改代码,修改start.S: cpy: ldr r4, [r1] str r4, [r2] add r1, r1, #4 //r1加4 add r2, r2, #4 //r2加4 cmp r2, r3 //如果r2 =< r3继续拷贝 ble cpy /* 清除BSS段 */ ldr r1, =bss_start ldr r2, =bss_end mov r3, #0 clean: str r3, [r1] add r1, r1, #4 cmp r1, r2 //如果r1 =< r2则继续拷贝 ble clean bl main 然后编译烧写,发现启动后没有输出字符。修改主程序,尝试以整数格式输出字符,发现输出的数从0开始,应该是全局变量被破坏了。 屏蔽掉start.S里面的清理命令,测试是否是清除bss段是清除了全局变量。 clean: //str r3, [r1] //注释掉此句话,str不仅把bss段清除,把全局变量这些也清除了 add r1, r1, #4 cmp r1, r2 ble clean bl main 屏蔽后,正常输出,锁定了问题大致位置。查看反汇编文件,原来是没有向4取整。 修改链接脚本让bss段,使用ALIGN(4)向4取整。 SECTIONS { .text 0 : { *(.text) } .rodata : { *(.rodata) } .data 0x30000000 : AT(0x700) { data_load_addr = LOADADDR(.data); . = ALIGN(4); data_start = . ; *(.data) data_end = . ; } . = ALIGN(4);//让当前地址向4对齐 bss_start = .; .bss : { *(.bss) *(.COMMON) } bss_end = .; } 现在重新编译烧写,测试结果正常。 再次查看反汇编文件,发现现在bss段以4字节对齐,清理bss段也是正常的。 Disassembly of section .bss: 30000004 30000004: 00000000 andeq r0, r0, r0 



史海拾趣
|
在Keil C51 uVision3 中调试w77E58如何设置才能使用片上的1K外部存贮器呀? 伟福V8仿真调试Winbond77E58不能正常使用片上1K外部存贮器的问题: 我用伟福V8/L仿真调试Winbond77E58板子, W77E58有片上1K外部存贮器,我不知是我的编译环境设置不对, 还是伟福不能仿真片上1K外部存贮器?在下面的程序中,将 int xdata i ...… 查看全部问答> |
|
想在ucosII上开发一款pdf查看程序(平台君正 Xburst MIPS jz4740),现有Foxit Embedded PDF SDK可惜不免费!!!!!!!!! 总不能从头开发吧,难度太了点吧!!可有免费的库!!!推荐一个!!… 查看全部问答> |
|
各位,我是想写一个程序放到手机里面跑,首先判断有没有连接(GPRS或CDMA),如果没有就建立连接,这里就需要判断是要建立一个GPRS的连接或者是CDMA的连接,各位有什么好建议请说一下,谢谢! 另有人告诉我可以通过读SIM卡的IMSI号判断是移动或者联通,各位 ...… 查看全部问答> |
|
使用keil写单片机程序时,在程序运行阶段是不允许修改code段中的内容的,但是,我现在想实现动态加载模块的功能,需要在程序运行的时候修改code段的内容. 请问有什么办法在程序运行期间修改code段的内容? & ...… 查看全部问答> |
|
学校开了这门课(MCS-51)但学校太差了,这么课居然没实验课,想问一下怎么把书上的程序调一边啊,怎么在电脑上模拟(包括电路设计,程序调试,最终产品模拟),还有实际做中这些器件网上哪里有的买… 查看全部问答> |
|
【求助】74HC165的操作,只能控制一个按键,其他的控制不了,搞不明白 #define PL P2_3//SHIFT/LOAD引脚 #define CLOCK P2_4 #define SETBSC P2_5//OUTPUT QH引脚 read74hc165m() {uchar basic,c; PL=1; nop(); PL=0;//使能端为低电平时8位数据进入寄存器 nop(); PL=1;//高电平数据锁存,同时165数据自动 ...… 查看全部问答> |