



历史上的今天
今天是:2024年08月31日(星期六)
2020年08月31日 | 单片机+LCD1602+HR-04显示屏显示超声波测距工作原理
2020-08-31 来源:51hei
1.基本工作原理
(1)采用IO口TRIG触发测距,给最少10us的高电平信号。
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回。
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续时间就是超声波从发射到返回的时间,测试距离=(高电平时间*声速(340M/s)/2(发射和回来的时间,所以要除以2))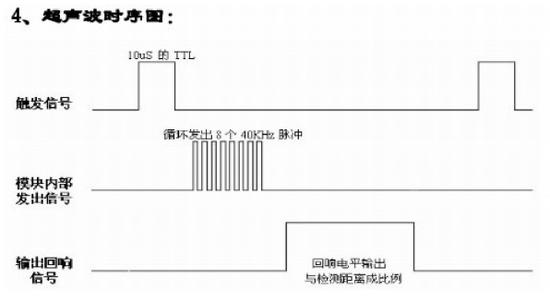
2.模块实物图
3.驱动程序
文章下面有链接,由于proteus里面没有HR04模块,所以在仿真的时候可以用另一个单片机模拟HR-04模块,然后单片机和单片机进行通信,不能用串口通信,因为超声波测距在用定时器进行着计时,而设置波特率用到定时器1,没办法用定时器1来设置波特率。过程有点麻烦,我就没搭建,其他的搭建好。
4.效果图

AT89C52单片机源程序如下:
/*
实验说明:
STC89C52 晶振:12Mhz 模块:HR04 LCD1602
LCD1602液晶模块-->单片机管脚
参考LCD1602液晶显示实验接线(开发攻略内在对应的实验章节内实验现象有接线说明)
超声波模块-->单片机管脚
TRIG-->P21
ECHO-->P20
LCD1602_RW-->P2^5
LCD1602_RS-->P2^6
LCD1602_E-->P2^7
因为proteus里面没有HR04模块,HR04是一个模拟信号,我们可以用一个模拟信号代替HR04,处理方法是一样的
实验现象:
LCD1602上显示超声波检测的距离,单位mm
仅限用于交流学习
*/
#include #include #include"lcd.h" sbit Trig = P2^1; sbit Echo = P2^0; unsigned char PuZh[]=" Pechin Science ";//显示距离 unsigned char code ASCII[15] = {'0','1','2','3','4','5','6','7','8','9','.','-','M'}; static unsigned char DisNum = 0; //显示用指针 unsigned int time=0; unsigned long S=0; bit flag =0; unsigned char disbuff[4] ={ 0,0,0,0,}; /******************************************************************************* * 函 数 名 : main * 函数功能 : 主函数 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ void Conut(void) { time=TH0*256+TL0; TH0=0; TL0=0; S=(time*1.7)/100; //算出来是CM if((S>=700)||flag==1) //超出测量范围显示“-” { flag=0; DisplayOneChar(0, 1, ASCII[11]); DisplayOneChar(1, 1, ASCII[10]); //显示点 DisplayOneChar(2, 1, ASCII[11]); DisplayOneChar(3, 1, ASCII[11]); DisplayOneChar(4, 1, ASCII[12]); //显示M } else { disbuff[0]=S%1000/100; disbuff[1]=S%1000%100/10; disbuff[2]=S%1000%10 %10; DisplayOneChar(0, 1, ASCII[disbuff[0]]); DisplayOneChar(1, 1, ASCII[10]); //显示点 DisplayOneChar(2, 1, ASCII[disbuff[1]]); DisplayOneChar(3, 1, ASCII[disbuff[2]]); DisplayOneChar(4, 1, ASCII[12]); //显示M } } void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围 { flag=1; //中断溢出标志 } void StartModule() //启动模块 { Trig=1; //启动一次模块 _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); Trig=0; } void delayms(unsigned int ms) { unsigned char i=100,j; for(;ms;ms--) { while(--i) { j=10; while(--j); } } } void main(void) { TMOD=0x01; //设T0为方式1,GATE=1; TH0=0; TL0=0; ET0=1; //允许T0中断 EA=1; //开启总中断 LcdInit(); LcdShowStr(0,0,PuZh); while(1) { StartModule(); while(!Echo); //当RX为零时等待 TR0=1; //开启计数 while(Echo); //当RX为1计数并等待 TR0=0; //关闭计数 Conut(); //计算 delayms(80); } }
史海拾趣
|
职能部门主要指某公司目前传统的组织部门如技术质管部、设计质量部、人力资源、财务等部门,PDT是在推行新的产品开发流程IPD之后成立的跨部门运作团队。在推行IPD之后,职能部门的重新定位、职能部门与PDT之间的沟通协作就变得和以前有所不同了。 ...… 查看全部问答> |
|
单片机说白了就是一个小的电脑的主机 那么有了主机以后 想让他正常动起来 当然缺不了键盘 好了长话短说 下面进入正题 让我们一起来制作一个键盘 键 ...… 查看全部问答> |
|
mmsp20,wince 5.0系统,7寸液晶,带触模。 在播放器的界面下,点击空白的地方(非功能按钮)。 连续点击1~3小时后,系统全死了。(大概0.5秒点一次) 在点击屏蔽时播放会停顿一下。 请大家帮忙分析一下是什么原因?… 查看全部问答> |
|
一、简介 异常:也就是意外突发事件,该请求来自外面,来自片上外设秒外扩的外设。 可是说是异步的。 中断:是因内核活动产生的,如在执行命令和访问存储器时产生。应是同步。 Corter-M3的异常响应系统,支持众多的系统异常和外部 ...… 查看全部问答> |
|
大家好,我是新人小白,问一个Arduino问题,双L298n驱动四个直流电机pwm调速度 各位大神,我是arduino小白,现在有个项目,是要用一个arduino板子控制四个直流电机,并且可以分别调速。 我目前的构思是通过一个arduino板子链接一个双l298n板子,控制四个直流电机,但是只是构思,不知道这个方案行不行,也不知道能不能通过pwm ...… 查看全部问答> |