



历史上的今天
今天是:2024年10月29日(星期二)
2021年10月29日 | 51单片机学习笔记之中断
2021-10-29 来源:eefocus
(一)寄存器
要想学习中断那么首先就要了解寄存器,在这里我们学习一下什么是寄存器,寄存器怎么用。
1.什么是寄存器
寄存器是特殊的RAM,特殊功能寄存器是控制单片机硬件的开关(例如IE)或者是指示单片机状态的信号(例如PSW),通过特殊寄存器你就可以方便的控制整个MCU,并且知道当前的MCU的工作状态。
2.寄存器怎么用
AT89S51单片机中的特殊功能寄存器(SFR)的单元地址映射在片内RAM区的80H~FFH区域中,它共有26个,离散地分布在该区域中。用到哪个寄存器就相应配置哪个寄存器即可。寄存器太多就不一一写出来了,用到再去找就好。
(二)中断
单片机的中断是由单片机片内的中断系统来实现的。当中断请求源(简称中断源)发出中断请求时,如果中断请求被允许的话,单片机暂时中止当前正在执行的主程序,转到中断服务程序处理中断服务请求,处理完中断服务请求后,再回到原来被中止的程序之处(断点),继续执行被中断的主程序。
1.中断允许寄存器IE
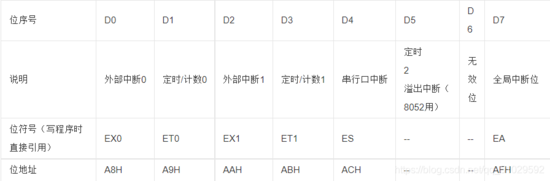
EX0
外部中断0允许位。EX0=1,允许外部中断0中断;EX0=0,禁止外部中断0中断。当EX0=1( SETB EX0 )时,同时单片机P3.2引脚上出现中断信号时,单片机中断主程序的执行而“飞”往中断服务子程序,执行完后通过中断返回指令RET 动返回主程序。当EX0=0( CLR EX0)时,即使单片机P3.2引脚上出现中断信程序也不会从主程序“飞” 出去执行,因为此时单片机的CPU相当于被“堵上了耳朵”,根本接收不到P3.2引脚上的中断信号,但是这并不表示这个信号不存在。如果单片机的CPU有空查一下TCON中的IE0位,若为1就说明有中断信号出现过。
ET0
T0溢出中断允许位。ET0=1,允许T0中断;ET0=0,禁止T0中断。
EX1
外部中断1允许位。EX1=1,允许外部中断1中断;EX1=0,禁止外部中断1中断。当EX1=1( SETB EX1)时,并且外部P3.3引脚上出现中断信号时,单片机CPU会中断主程序而去执行相应的中断服务子程序;当EX1=0( CLR EX1)时使外部P3.3引脚上即使出现中断信号,单片机的CPU也不能中断主程序转而去行中断服务子程序。
因此,可以这样认为,EX0和EX1是决定CPU能否感觉到外部引脚P3.2P3.3上的中断信号的控制位。
ET1
T1溢出中断允许位。ET1=1,允许T1中断;ET1=0,禁止T1中断。
ES
串行中断允许位。ES=1,允许串行口中断;ES=0,禁止串行口中断。
EA
中断总允许位。EA=1,CPU开放中断;EA=0,CPU禁止所有的中断请求。总允许EA好比一个总开关。EA就相当于每家水管的总闸,如果总闸不开,各个龙头即使开了也不会有水;反过来,如果总闸开了而各个分闸没开也不会有水,所当我们想让P3.2和P3.3引脚上的信号能够中断主程序则必须将EA位设置为0(CLR EA)。
使用方法
(1)整体赋值:IE=0x81;(开启全局中断,打开外部中断0 )。
(2)单独赋值:EA=1;EX0=1;(开启全局中断,打开外部中断0 )。
2.中断优先级寄存器IP
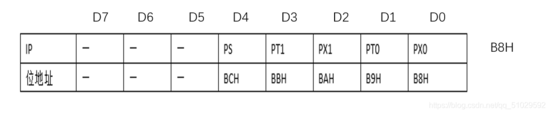
PS——串行口中断优先级控制位
PS=1,串行口中断定义为高优先级中断。
PS=0,串行口中断定义为低优先级中断。
PT1——定时器/计数器1中断优先级控制位
PT1=1,定时器/计数器1中断定义为高优先级中断。
PT1=0,定时器/计数器1中断定义为低优先级中断。
PX1——外部中断1中断优先级控制位
PX1=1,外部中断1定义为高优先级中断。
PX1=0,外部中断1定义为低优先级中断。
PT0——定时器/计数器0中断优先级控制位
PT0=1,定时器/计数器0中断定义为高优先级中断。
PT0=0,定时器/计数器0中断定义为低优先级中断。
PX0——外部中断0中断优先级控制位
PX0=1,外部中断0定义为高优先级中断。
PX0=0,外部中断0定义为低优先级中断。
中断优先级(高到低)
外部中断0
T0溢出中断
外部中断1
T1溢出中断
串行口中断
T2溢出中断(52)
3.TCON寄存器

TF1:片内定时器/计数器T1的溢出中断请求标志位。
当启动T1计数后,定时器/计数器T1从初值开始加1计数,当计数溢出时,由硬件自动为TF1置“1”,向CPU申请中断。CPU响应TF1中断时,TF1标志位由硬件自动清零,TF1也可由软件清零。
TF0:片内定时器/计数器T0的溢出中断请求标志位。
功能与TF1相同。
IE1:外部中断请求1的中断请求标志位。
IE1=0,无中断请求。
IE1=1,外部中断1有中断请求。当CPU响应该中断,转向中断服务程序时,由硬件清“0”IE1。
IE0: 外部中断请求0的中断请求标志位。
IE0=0,无中断请求。
IE0=1,外部中断0有中断请求。当CPU响应该中断,转向中断服务程序时,由硬件清“0”IE0。
IT1:选择外部中断请求1为负跳变触发方式还是电平触发方式。
IT1=0,为电平触发方式,外部中断请求输入信号为低电平有效,并把IE置“1”。转向中断服务程序时,则由硬件自动把IE1清零。
IT1=1,为负跳变触发方式,外部中断请求输入信号电平为从高到低的负跳变有效,,并把IE置“1”。转向中断服务程序时,则由硬件自动把IE1清零。
IT0:选择外部中断请求0为负跳变触发还是电平触发方式。
与IT1相似。
4.SCON寄存器
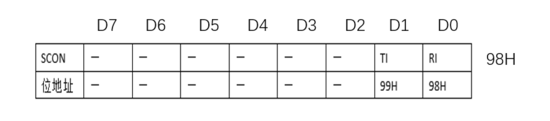
TI:串行口发送中断请求标志位。
当CPU将1字节的数据写入串行口的发送缓冲器SBUF时,就启动一帧串行数据的发送,每发送完一帧串行数据后,硬件把TI中断请求标志位自动置“1”。CPU响应串行口发送中断时,并不能清除TI标志位,TI标志位必须在中断服务程序中用指令对其清零。
RI:串行口接收中断请求标志位。
在串行口接收完一个串行数据帧,硬件自动使RI中断请求标志位置“1”。CPU在响应串行口接收中断时,RI标志位并不清零,必须在中断服务程序中用指令对RI清零。
(三)外部中断
51单片机的外部中断int0对应的引脚为p3.2,外部中断int1对应的引脚为p3.3。
1.外部中断0,按下开关K3,数码管0变1
寄存器配置:
EA=1;//总中断允许
EX0=1;//允许外部中断0
IT0=0;//选择外部中断0为电平触发方式
完整代码:
#include #define uchar unsigned char sbit key = P3^2; void delay(unsigned int i)//延时函数 { unsigned int j; for(;i>0;i--) for(j=0;j<333;j++){} } void main()//主函数 { EA=1;//总中断允许 EX0=1;//允许外部中断0 IT0=0;//选择外部中断0为电平触发方式 while(1)//循环 {P0=0x3f;}//P0.0口的Led亮 } void key_scan() interrupt 0 //外部中断0的中断服务函数 { if(key==0)//判断是否有按键按下 { delay(10);//延时去抖 if(key==0) { P2=0xfe; P0=0x06; while(!key);//等待按键松开 P2=0xff; P0=0x3f; } } } 2.外部中断1,按下开关K4,数码管0变1 寄存器配置: EA=1;//总中断允许 EX1=1;//允许外部中断0 IT1=0;//选择外部中断0为电平触发方式 完整代码: #include #define uchar unsigned char sbit key = P3^3; void delay(unsigned int i)//延时函数 { unsigned int j; for(;i>0;i--) for(j=0;j<333;j++){} } void main()//主函数 { EA=1;//总中断允许 EX1=1;//允许外部中断0 IT1=0;//选择外部中断0为电平触发方式 while(1)//循环 {P0=0x3f;}//P0.0口的Led亮 } void key_scan() interrupt 1 //外部中断1的中断服务函数 { if(key==0)//判断是否有按键按下 { delay(10);//延时去抖 if(key==0) { P2=0xfe; P0=0x06; while(!key);//等待按键松开 P2=0xff; P0=0x3f; } } } 3.外部中断扩展 寄存器配置: IT0 = 1;//跳沿触发 IT1 = 1;//跳沿触发 PX1 = 1;//中断1高于中断0 IE = 0x85;/*由低到高:EX1(第3位)=1,EX0 (第0位)= 1,EA (第八位)= 1 IE = 10000101*/ 完整代码: #include #include #define uchar unsigned char #define uint unsigned int uint i; void delay(uint xms); void Int(); void Interrupt0(); void Interrupt1(); void main() { Int(); P2 = 0xfe; while(1) { for (i = 0;i < 7;i++) { P2 = _crol_(P2, 1);//先左移 delay(600); } for (i = 0;i < 7;i++) { P2 = _cror_(P2, 1);//再右移 delay(600); } } } void Int() { IT0 = 1;//跳沿触发 IT1 = 1;//跳沿触发 PX1 = 1;//中断1高于中断0 IE = 0x85;/*由低到高:EX1(第3位)=1,EX0 (第0位)= 1,EA (第八位)= 1 IE = 10000101*/ } void delay(uint xms)//AT89C5211.0592MHz { uint x, y; for (x = xms;x > 0;x--) for (y = 110;y > 0;y--); } void Interrupt1() interrupt 0 { while (1) { P2 = 0x0f; delay(600); P2 = 0xf0; delay(600); } } void Interrupt2() interrupt 2/*外部中断1的标号是2!*/ { while (1) { P2 = 0xcc;//(11001100) delay(600); P2 = 0x33; delay(600); } } (四)定时器中断 1.定时器0 寄存器配置: TMOD = 0x01; TH0 = (65536 - 45872) / 256; // 设置定时器0为工作方式1(M1M0为01) TL0 = (65536 - 45872) % 256; // 装初值11.0592M晶振定时50ms数位45872 EA = 1; // 开总中断 ET0 = 1; // 开定时器0中断 TR0 = 1; // 启动定时器0 完整代码: #include #include #define uchar unsigned char #define uint unsigned int sbit led1 = P2^0; uchar num = 0; void main() { TMOD = 0x01; TH0 = (65536 - 45872) / 256; // 设置定时器0为工作方式1(M1M0为01) TL0 = (65536 - 45872) % 256; // 装初值11.0592M晶振定时50ms数位45872 EA = 1; // 开总中断 ET0 = 1; // 开定时器0中断 TR0 = 1; // 启动定时器0 while(1) { ; } } void T0_time() interrupt 1 { TH0 = (65536 - 45872) / 256; TL0 = (65536 - 45872) % 256; num++; if (num == 20) { num = 0; led1 = ~led1; } } 2.定时器1 寄存器配置: TMOD = 0x01; TH0 = (65536 - 45872) / 256; // 设置定时器1为工作方式1(M1M0为01) TL0 = (65536 - 45872) % 256; // 装初值11.0592M晶振定时50ms数位45872 EA = 1; // 开总中断 ET1 = 1; // 开定时器1中断 TR1 = 1; // 启动定时器1 完整代码: #include #include #define uchar unsigned char #define uint unsigned int sbit led1 = P2^0; uchar num = 0; void main() { TMOD = 0x01; TH0 = (65536 - 45872) / 256; // 设置定时器1为工作方式1(M1M0为01) TL0 = (65536 - 45872) % 256; // 装初值11.0592M晶振定时50ms数位45872 EA = 1; // 开总中断 ET1 = 1; // 开定时器1中断 TR1 = 1; // 启动定时器1 while(1) { ; } } void T1_time() interrupt 3 { TH0 = (65536 - 45872) / 256; TL0 = (65536 - 45872) % 256; num++; if (num == 20) { num = 0; led1 = ~led1; } } 3.定时器计数控制数码管0到60 寄存器配置: TMOD=0x11;//写在一起 //定时器0 //TMOD=0x01; TH0=(65536-45872)/256; TL0=(65536-45872)%256; EA=1; ET0=1; TR0=1; //定时器1 //TMOD=0x10; TH1=(65536-45872)/256; TL1=(65536-45872)%256; EA=1; ET1=1; TR1=1; 完整代码: #include #define uint unsigned int #define uchar unsigned char uchar code table[]={ 0x3f,0x06,0x5b,0x4f, 0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c, 0x39,0x5e,0x79,0x71 };//共阴极数码管编码 uchar num0,num1; uint ge ,shi; sbit LSA=P2^2;//74HC138译码器端口 sbit LSB=P2^3; sbit LSC=P2^4; void display_time(uint ,uint); void delay_ms(uint); void main() { TMOD=0x11;//写在一起 //定时器0 //TMOD=0x01; TH0=(65536-45872)/256; TL0=(65536-45872)%256; EA=1; ET0=1; TR0=1; //定时器1 //TMOD=0x10; TH1=(65536-45872)/256; TL1=(65536-45872)%256; EA=1; ET1=1; TR1=1; while(1) { display_time(ge ,shi);//时间一直显示中 } } void T0_time()interrupt 1 //数码管处理 T0定时器 { TH0=(65536-45872)/256;//每50ms产生一次中断 TL0=(65536-45872)%256;//所以每20次中断,个位+1 num0++; if(num0==20) { num0=0; ge++; if(ge==10) { shi++; //时间进位 ge=0; } if(shi==6) shi=0; //时间归零 } } void display_time(uint ge ,uint shi) { LSA=0;LSB=1;LSC=1; P0=table[ge];//送入个位数字 delay_ms(5); LSA=1;LSB=1;LSC=1; P0=table[shi];//送入十位数字 delay_ms(5); } void delay_ms(uint ms) { uint i,j; for(i=ms;i>0;i--) for(j=110;j>0;j--); } 4.定时器做的时钟 寄存器配置: TMOD=0x01; TH0=(65536-45872)/256; TL0=(65536-45872)%256; EA=1; ET0=1; TR0=1; 完整代码: #include #define uint unsigned int #define uchar unsigned char uchar code table[]={ 0x3f,0x06,0x5b,0x4f, 0x66,0x6d,0x7d,0x07, 0x7f,0x6f,0x77,0x7c, 0x39,0x5e,0x79,0x71 };//共阴极数码管编码 uchar num; uint hour_ge,hour_shi,minute_ge, minute_shi,second_ge,second_shi; sbit LSA=P2^2;//74HC138译码器端口 sbit LSB=P2^3; sbit LSC=P2^4; void display_time(uint,uint,uint,uint,uint,uint); void delay_ms(uint); void main() { TMOD=0x01; TH0=(65536-45872)/256; TL0=(65536-45872)%256; EA=1; ET0=1; TR0=1; while(1) { display_time(hour_shi,hour_ge,minute_shi,minute_ge,second_shi,second_ge); //时间一直显示中 } } void T0_time()interrupt 1 //数码管处理 T0定时器 { TH0=(65536-45872)/256;//每50ms产生一次中断 TL0=(65536-45872)%256;//所以每20次中断,个位+1 num++; if(num==20) { num=0; second_ge++;//秒+1 } if(second_ge==10) { second_ge=0; second_shi++; if(second_shi==6) { second_shi=0; minute_ge++; if(minute_ge==10) { minute_ge=0; minute_shi++; if(minute_shi==6) { minute_shi=0; hour_ge++; if(hour_ge==10) { hour_ge=0; hour_shi++; if(hour_shi==2&&hour_ge==4) { hour_shi=0; hour_ge=0;
下一篇:学习笔记之51单片机键盘篇
史海拾趣
|
当我在对一个电路进行仿真时总是出现这些错误,但我又不知道什么意思,请各位高手指点一下。 非常感谢! C3 Error: Pin order data (PINS=1:[]) not in READ ONLY field 4. Pins sorted by pin-name. C3 Error ...… 查看全部问答> |
|
从无铅、RoHS到无卤素,再到PoHS,业界对环保材料的“门槛”越设越高,未来的绿色之路将走向何处?今年10月15-16日高交会电子展期间,品牌研讨会\"IPCWorks Asia\"将再次在深圳举办,本届会议的主题是\"无铅/无卤素制造\",届时众多业内无卤技术专 ...… 查看全部问答> |
|
SqlCE PULL正常 SubmitSql也是正常的. 但是在 PUSH时出错. 请会的指点一下. 程序如下: string _strRemoteConnect = \"provider=sqloledb;data source=192.168.1.99;Initial Catalog=zls;User ID=sa;\"; SqlCeRe ...… 查看全部问答> |
|
_delay_ms()这个延时到底有多准啊? 如果用计数器TNCT0计数,TNCT0的初始值为55,跳到255后溢出中断, 选择8分频的时钟源,F_CPU= 16M,10ms的时间TNCT0的溢出次数应该是100次 即TNCT0跳了100*(255-55)= 20000次。 问: _ ...… 查看全部问答> |
|
要求输出电流高的的开关电路,集电极输入vcc为6.5v,按键基极输入5.22v。求高手详解一下电路,q1为ss8050,q2为2SC2500,我觉得这个电路构不成开关电路,我的理由是6.5>5.22是反偏,集电极反偏,发射极正便,求高手解决小弟的问题。更加纳闷的是 ...… 查看全部问答> |
|
本帖最后由 dontium 于 2015-1-23 12:43 编辑 ECG 机的基本功能包括 ECG 波形显示(通过 LCD 显示屏或印刷纸媒质显示)、心跳律动指示以及通过按钮控制的简单用户界面。越来越多的 ECG 产品要求具备更多的功能,例如通过便携式媒体存储电子病历、 ...… 查看全部问答> |
|
芯片适用,nRF24L01无线数据传输电路,nRF24L01引脚说明及封装图。 资源连接: https://download.eeworld.com.cn/detail/lbk747/948… 查看全部问答> |