



历史上的今天
今天是:2024年12月27日(星期五)
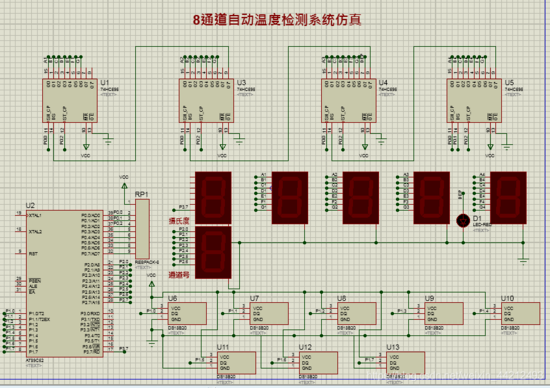
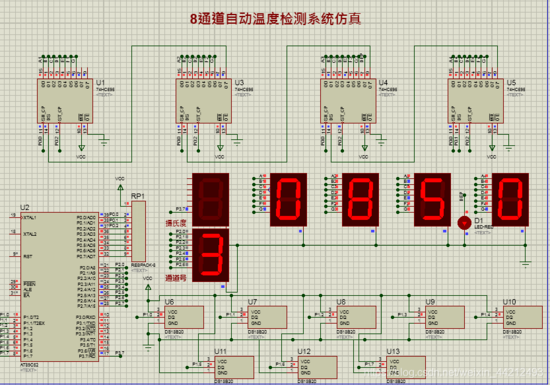
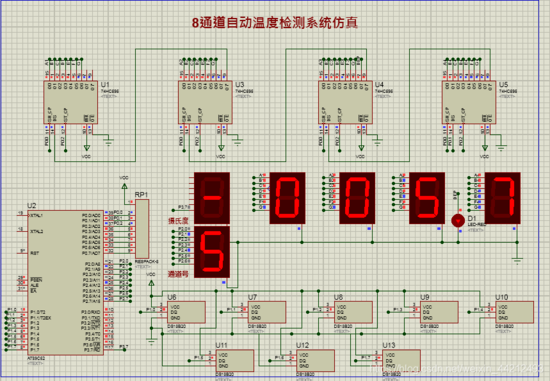
2021年12月27日 | 8通道自动温度检测系统仿真
2021-12-27 来源:eefocus
仿真程序功能:用八个通道分别检测8路信号,并通过数码管实时显示
程序参考源代码如下:
CLR P3.7
MAIN:MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER
LCALL TEMPRRO
MOV P2,#06H
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER2
LCALL TEMPRRO
MOV P2,#5BH
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER3
LCALL TEMPRRO
MOV P2,#4FH
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER4
LCALL TEMPRRO
MOV P2,#66H
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER5
LCALL TEMPRRO
MOV P2,#6DH
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER6
LCALL TEMPRRO
MOV P2,#7DH
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER7
LCALL TEMPRRO
MOV P2,#07H
LCALL PRO
;------------------------------------------------------
MOV 38H,#00H
MOV 39H,#00H
MOV 3AH,#00H
MOV 3BH,#00H
LCALL GET_TEMPER8
LCALL TEMPRRO
MOV P2,#7FH
LCALL PRO
LJMP MAIN
;==============================================CHL1
GET_TEMPER:
SETB P1.0H ; 定时入口
BCD: LCALL INIT_1820
JB 00H,S22
LJMP BCD ; 若DS18B20不存在则返回
S22: LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配------0CC命令
LCALL WRITE_1820
MOV A,#44H ; 发出温度转换命令
LCALL WRITE_1820
NOP
LCALL DELAY1
CBA:LCALL INIT_1820
JB 00H,ABC
LJMP CBA
ABC:LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配
LCALL WRITE_1820
MOV A,#0BEH ; 发出读温度命令
LCALL WRITE_1820
LCALL READ_18200 ;READ_1820
RET
;==============================
READ_1820:
MOV R2,#8
RE1:
CLR C
SETB P1.0H
NOP
NOP
CLR P1.0H
NOP
NOP
NOP
SETB P1.0H
MOV R3,#7
DJNZ R3,$
MOV C,P1.0H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE1
RET
;=============================
WRITE_1820:
MOV R2,#8
CLR C
WR1:
CLR P1.0H
MOV R3,#6
DJNZ R3,$
RRC A
MOV P1.0H,C
MOV R3,#23
DJNZ R3,$
SETB P1.0H
NOP
DJNZ R2,WR1
SETB P1.0H
RET
;=======================================
READ_18200:
MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
MOV R1,#31H ; 低位存入30H(TEMPER_L),高位存入31H(TEMPER_H)
RE00:
MOV R2,#8
RE01:
CLR C
SETB P1.0H
NOP
NOP
CLR P1.0H
NOP
NOP
NOP
SETB P1.0H
MOV R3,#7
DJNZ R3,$
MOV C,P1.0H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE01
MOV @R1,A
DEC R1
DJNZ R4,RE00
RET
;=======================================
INIT_1820:
SETB P1.0H
NOP
CLR P1.0H
MOV R0,#250
TSR1:
DJNZ R0,TSR1 ; 延时520us
SETB P1.0H
MOV R0,#25H ;96US-25H
TSR2:
DJNZ R0,TSR2
JNB P1.0H,TSR3;如D0为低则复位成功,DS18B20存在
LJMP TSR4 ; 延时
TSR3:
SETB 00H ; 置标志位,表示DS1820存在
LJMP TSR5
TSR4:
CLR 00H ; 清标志位,表示DS1820不存在
LJMP TSR7
TSR5:
MOV R0,#06BH ;200US
TSR6:
DJNZ R0,TSR6 ; 延时
TSR7:
SETB P1.0H ;拉高总线
RET
;===============================
GET_TEMPER2:
SETB P1.1H ; 定时入口
BCD2: LCALL INIT_18202
JB 00H,S222
LJMP BCD2 ; 若DS18B20不存在则返回
S222: LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配------0CC命令
LCALL WRITE_18202
MOV A,#44H ; 发出温度转换命令
LCALL WRITE_18202
NOP
LCALL DELAY1
CBA2:LCALL INIT_18202
JB 00H,ABC2
LJMP CBA2
ABC2:LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配
LCALL WRITE_18202
MOV A,#0BEH ; 发出读温度命令
LCALL WRITE_18202
LCALL READ_182002 ;READ_1820
RET
;==============================
READ_18202:
MOV R2,#8
RE12:
CLR C
SETB P1.1H
NOP
NOP
CLR P1.1H
NOP
NOP
NOP
SETB P1.1H
MOV R3,#7
DJNZ R3,$
MOV C,P1.1H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE12
RET
;=============================
WRITE_18202:
MOV R2,#8
CLR C
WR12:
CLR P1.1H
MOV R3,#6
DJNZ R3,$
RRC A
MOV P1.1H,C
MOV R3,#23
DJNZ R3,$
SETB P1.1H
NOP
DJNZ R2,WR12
SETB P1.1H
RET
;=======================================
READ_182002:
MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
MOV R1,#31H ; 低位存入30H(TEMPER_L),高位存入31H(TEMPER_H)
RE002:
MOV R2,#8
RE012:
CLR C
SETB P1.1H
NOP
NOP
CLR P1.1H
NOP
NOP
NOP
SETB P1.1H
MOV R3,#7
DJNZ R3,$
MOV C,P1.1H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE012
MOV @R1,A
DEC R1
DJNZ R4,RE002
RET
;=======================================
INIT_18202:
SETB P1.1H
NOP
CLR P1.1H
MOV R0,#250
TSR12:
DJNZ R0,TSR12 ; 延时520us
SETB P1.1H
MOV R0,#25H ;96US-25H
TSR22:
DJNZ R0,TSR22
JNB P1.1H,TSR32;如D0为低则复位成功,DS18B20存在
LJMP TSR42 ; 延时
TSR32:
SETB 00H ; 置标志位,表示DS1820存在
LJMP TSR52
TSR42:
CLR 00H ; 清标志位,表示DS1820不存在
LJMP TSR72
TSR52:
MOV R0,#06BH ;200US
TSR62:
DJNZ R0,TSR62 ; 延时
TSR72:
SETB P1.1H ;拉高总线
RET
;===============================
GET_TEMPER3:
SETB P1.2H ; 定时入口
BCD3: LCALL INIT_18203
JB 00H,S223
LJMP BCD3 ; 若DS18B20不存在则返回
S223: LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配------0CC命令
LCALL WRITE_18203
MOV A,#44H ; 发出温度转换命令
LCALL WRITE_18203
NOP
LCALL DELAY1
CBA3:LCALL INIT_18203
JB 00H,ABC3
LJMP CBA3
ABC3:LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配
LCALL WRITE_18203
MOV A,#0BEH ; 发出读温度命令
LCALL WRITE_18203
LCALL READ_182003 ;READ_1820
RET
;==============================
READ_18203:
MOV R2,#8
RE13:
CLR C
SETB P1.2H
NOP
NOP
CLR P1.2H
NOP
NOP
NOP
SETB P1.2H
MOV R3,#7
DJNZ R3,$
MOV C,P1.2H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE13
RET
;=============================
WRITE_18203:
MOV R2,#8
CLR C
WR13:
CLR P1.2H
MOV R3,#6
DJNZ R3,$
RRC A
MOV P1.2H,C
MOV R3,#23
DJNZ R3,$
SETB P1.2H
NOP
DJNZ R2,WR13
SETB P1.2H
RET
;=======================================
READ_182003:
MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
MOV R1,#31H ; 低位存入30H(TEMPER_L),高位存入31H(TEMPER_H)
RE003:
MOV R2,#8
RE013:
CLR C
SETB P1.2H
NOP
NOP
CLR P1.2H
NOP
NOP
NOP
SETB P1.2H
MOV R3,#7
DJNZ R3,$
MOV C,P1.2H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE013
MOV @R1,A
DEC R1
DJNZ R4,RE003
RET
;=======================================
INIT_18203:
SETB P1.2H
NOP
CLR P1.2H
MOV R0,#250
TSR13:
DJNZ R0,TSR13 ; 延时520us
SETB P1.2H
MOV R0,#25H ;96US-25H
TSR23:
DJNZ R0,TSR23
JNB P1.2H,TSR33;如D0为低则复位成功,DS18B20存在
LJMP TSR43 ; 延时
TSR33:
SETB 00H ; 置标志位,表示DS1820存在
LJMP TSR53
TSR43:
CLR 00H ; 清标志位,表示DS1820不存在
LJMP TSR73
TSR53:
MOV R0,#06BH ;200US
TSR63:
DJNZ R0,TSR63 ; 延时
TSR73:
SETB P1.2H ;拉高总线
RET
;===============================
GET_TEMPER4:
SETB P1.3H ; 定时入口
BCD4: LCALL INIT_18204
JB 00H,S224
LJMP BCD4 ; 若DS18B20不存在则返回
S224: LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配------0CC命令
LCALL WRITE_18204
MOV A,#44H ; 发出温度转换命令
LCALL WRITE_18204
NOP
LCALL DELAY1
CBA4:LCALL INIT_18204
JB 00H,ABC4
LJMP CBA4
ABC4:LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配
LCALL WRITE_18204
MOV A,#0BEH ; 发出读温度命令
LCALL WRITE_18204
LCALL READ_182004 ;READ_1820
RET
;==============================
READ_18204:
MOV R2,#8
RE14:
CLR C
SETB P1.3H
NOP
NOP
CLR P1.3H
NOP
NOP
NOP
SETB P1.3H
MOV R3,#7
DJNZ R3,$
MOV C,P1.3H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE14
RET
;=============================
WRITE_18204:
MOV R2,#8
CLR C
WR14:
CLR P1.3H
MOV R3,#6
DJNZ R3,$
RRC A
MOV P1.3H,C
MOV R3,#23
DJNZ R3,$
SETB P1.3H
NOP
DJNZ R2,WR14
SETB P1.3H
RET
;=======================================
READ_182004:
MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
MOV R1,#31H ; 低位存入30H(TEMPER_L),高位存入31H(TEMPER_H)
RE004:
MOV R2,#8
RE014:
CLR C
SETB P1.3H
NOP
NOP
CLR P1.3H
NOP
NOP
NOP
SETB P1.3H
MOV R3,#7
DJNZ R3,$
MOV C,P1.3H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE014
MOV @R1,A
DEC R1
DJNZ R4,RE004
RET
;=======================================
INIT_18204:
SETB P1.3H
NOP
CLR P1.3H
MOV R0,#250
TSR14:
DJNZ R0,TSR14 ; 延时520us
SETB P1.3H
MOV R0,#25H ;96US-25H
TSR24:
DJNZ R0,TSR24
JNB P1.3H,TSR34;如D0为低则复位成功,DS18B20存在
LJMP TSR44 ; 延时
TSR34:
SETB 00H ; 置标志位,表示DS1820存在
LJMP TSR54
TSR44:
CLR 00H ; 清标志位,表示DS1820不存在
LJMP TSR74
TSR54:
MOV R0,#06BH ;200US
TSR64:
DJNZ R0,TSR64 ; 延时
TSR74:
SETB P1.3H ;拉高总线
RET
;===============================
GET_TEMPER5:
SETB P1.4H ; 定时入口
BCD5: LCALL INIT_18205
JB 00H,S225
LJMP BCD5 ; 若DS18B20不存在则返回
S225: LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配------0CC命令
LCALL WRITE_18205
MOV A,#44H ; 发出温度转换命令
LCALL WRITE_18205
NOP
LCALL DELAY1
CBA5:LCALL INIT_18205
JB 00H,ABC5
LJMP CBA5
ABC5:LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配
LCALL WRITE_18205
MOV A,#0BEH ; 发出读温度命令
LCALL WRITE_18205
LCALL READ_182005 ;READ_1820
RET
;==============================
READ_18205:
MOV R2,#8
RE15:
CLR C
SETB P1.4H
NOP
NOP
CLR P1.4H
NOP
NOP
NOP
SETB P1.4H
MOV R3,#7
DJNZ R3,$
MOV C,P1.4H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE15
RET
;=============================
WRITE_18205:
MOV R2,#8
CLR C
WR15:
CLR P1.4H
MOV R3,#6
DJNZ R3,$
RRC A
MOV P1.4H,C
MOV R3,#23
DJNZ R3,$
SETB P1.4H
NOP
DJNZ R2,WR15
SETB P1.4H
RET
;=======================================
READ_182005:
MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
MOV R1,#31H ; 低位存入30H(TEMPER_L),高位存入31H(TEMPER_H)
RE005:
MOV R2,#8
RE015:
CLR C
SETB P1.4H
NOP
NOP
CLR P1.4H
NOP
NOP
NOP
SETB P1.4H
MOV R3,#7
DJNZ R3,$
MOV C,P1.4H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE015
MOV @R1,A
DEC R1
DJNZ R4,RE005
RET
;=======================================
INIT_18205:
SETB P1.4H
NOP
CLR P1.4H
MOV R0,#250
TSR15:
DJNZ R0,TSR15 ; 延时520us
SETB P1.4H
MOV R0,#25H ;96US-25H
TSR25:
DJNZ R0,TSR25
JNB P1.4H,TSR35;如D0为低则复位成功,DS18B20存在
LJMP TSR45 ; 延时
TSR35:
SETB 00H ; 置标志位,表示DS1820存在
LJMP TSR55
TSR45:
CLR 00H ; 清标志位,表示DS1820不存在
LJMP TSR75
TSR55:
MOV R0,#06BH ;200US
TSR65:
DJNZ R0,TSR65 ; 延时
TSR75:
SETB P1.4H ;拉高总线
RET
;===============================
GET_TEMPER6:
SETB P1.5H ; 定时入口
BCD6: LCALL INIT_18206
JB 00H,S226
LJMP BCD6; 若DS18B20不存在则返回
S226: LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配------0CC命令
LCALL WRITE_18206
MOV A,#44H ; 发出温度转换命令
LCALL WRITE_18206
NOP
LCALL DELAY1
CBA6:LCALL INIT_18206
JB 00H,ABC6
LJMP CBA6
ABC6:LCALL DELAY1
MOV A,#0CCH ; 跳过ROM匹配
LCALL WRITE_18206
MOV A,#0BEH ; 发出读温度命令
LCALL WRITE_18206
LCALL READ_182006 ;READ_1820
RET
;==============================
READ_18206:
MOV R2,#8
RE16:
CLR C
SETB P1.5H
NOP
NOP
CLR P1.5H
NOP
NOP
NOP
SETB P1.5H
MOV R3,#7
DJNZ R3,$
MOV C,P1.5H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE16
RET
;=============================
WRITE_18206:
MOV R2,#8
CLR C
WR16:
CLR P1.5H
MOV R3,#6
DJNZ R3,$
RRC A
MOV P1.5H,C
MOV R3,#23
DJNZ R3,$
SETB P1.5H
NOP
DJNZ R2,WR16
SETB P1.5H
RET
;=======================================
READ_182006:
MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
MOV R1,#31H ; 低位存入30H(TEMPER_L),高位存入31H(TEMPER_H)
RE006:
MOV R2,#8
RE016:
CLR C
SETB P1.5H
NOP
NOP
CLR P1.5H
NOP
NOP
NOP
SETB P1.5H
MOV R3,#7
DJNZ R3,$
MOV C,P1.5H
MOV R3,#23
DJNZ R3,$
RRC A
DJNZ R2,RE016
MOV @R1,A
DEC R1
DJNZ R4,RE006
RET
;=======================================
INIT_18206:
SETB P1.5H
NOP
CLR P1.5H
MOV R0,#250
TSR16:
DJNZ R0,TSR16 ; 延时520us
SETB P1.5H
MOV R0,#25H ;96US-25H
TSR26:
DJNZ R0,TSR26
JNB P1.5H,TSR36;如D0为低则复位成功,DS18B20存在
下一篇:单片机水塔控制系统
史海拾趣
|
2008 电子设计 A题 原创作品 基于ARM (省二等奖内附参赛论文) 本帖最后由 paulhyde 于 2014-9-15 03:32 编辑 这可是我们8天7夜奋斗的结果哦,虽然我们得了省二等奖,但是我们能成功的运用ARM,也很满足了!~!~ 下载不了的可以留下你们的邮箱!~!~! [ 本帖最后由 歹匕示申 于 2008-12-25 14:50 编辑 ] ...… 查看全部问答> |
|
我做课程设计其中写的一个模块的程序老出错,改了很多遍仍不能用。这个模块的功能就像是电话机号码输入,计算器的数字输入差不多。 程序要求: 用10个按键控制0-9数字输入。 每次按键输入,前一个数都向前进一位,例如:输入一个5,显示00000005 ...… 查看全部问答> |
|
最近忙一个项目,时间紧迫了,可目前遇到一个严重的问题,详情是这样:我用EVC.0编一个程序来把采集的数据保存在嵌入式设备的SQLCE数据库中,但弄来弄去发现保存速度跟不上,不知道各位大侠是否知道有什么方法能实现数据库的高速保存。感激不尽啊, ...… 查看全部问答> |
|
求助:CodeWarrior for ADS 1.2中编译出错 工程中,用ADS编译,出现了Errors: Could not find or load the file 襐IC.a?for target 褼ebugRel?for project 襱est1.mcp? Could not find or load the file 褻omm.a?for target 褼ebugRel?for project 襱est1.mcp? The following access p ...… 查看全部问答> |
|
请登陆淘宝进行详细的细节查询 淘宝地址: http://auction1.taobao.com/auction/0/item_detail-0db2-a975eaf6e989403d6987eeb2fde3c9d9.jhtml 欢迎购买. … 查看全部问答> |
|
小弟刚入道,就遇到棘手的问题,希望大家帮忙啊,谢谢! 问题如下 在Wince下 我在Form1中添加了一个PictureBox1,想在上面画个点,或者圆 结果发现连Paint()函数都没 ,郁闷;还有 CreatGraphic函数也没,该怎么办啊? 使用VB.net2005 谁能发个 ...… 查看全部问答> |