



历史上的今天
今天是:2026年01月11日(星期日)
2023年01月11日 | stm32之SPI通信协议实例详解
2023-01-11 来源:jdzj
之前一直对SPI通信一知半解,所以想抽空把它搞得明白一些。考虑到之前是结合Flash芯片来学的,十分不直观,而且主要把时间和精力都花在Flash芯片的datasheet和驱动上了,SPI通信也没学好。所以这次就考虑用4位数码管显示模块,模块是直接买的现成的,这样可以简化操作,把精力聚焦到学习的核心–SPI通信本身上来。
本次采用的模块是用2片74HC595串联驱动的,一片用来控制数码管的位选(U1),一片用来控制数码管的段选(U2)。
接口比较简单,总共5个引脚,2个引脚分别接VCC和GND,DIO用来接收串行数据的输入,SCLK用来接收同步时钟,每个SCLK上升沿74HC595内部的移位寄存器会移一位,RCLK用来控制数据的输出,每个RCLK上升沿74HC595内部的移位寄存器的数据会被放进存储寄存器并输出到外部引脚QA~QH上。而QH’是串行输出引脚,该引脚会接收最高位的溢出,从而实现多片74HC595的级联。

当两片74HC595串联时,先发八位数据用于段选,再发八位数据用于位选,然后RCLK上升沿,就可以驱动某位数码管显示某个字符,通过动态扫描数码管,由于人眼的视觉暂停效果,就可以实现4位数码管的同时显示。先用通用I/O来实现该数码管的驱动,程序如下:
头文件74HC595.h
#ifndef __74HC595_H__
#define __74HC595_H__
#include"stm32f10x_lib.h" //包含所有的头文件
#include
// 4-Bit LED Digital Tube Module
#define HC595_SCLK_PIN GPIO_Pin_5 // SPI1_SCK PA5
#define HC595_RCLK_PIN GPIO_Pin_12 // SPI1_NSS PA4
#define HC595_DIO_PIN GPIO_Pin_7 // SPI1_MOSI PA7
#define HC595_GPIO GPIOA
#define HC595_RCLK_GPIO GPIOB
#define HC595_RCC RCC_APB2Periph_GPIOA
#define HC595_RCLK_RCC RCC_APB2Periph_GPIOB
void HC595_Init(void);
void HC595_SendByte(u8 data);
u8 HC595_Display(u16 num, u8 dp);
#endif
源文件74HC595.c
// 用于HC595实现的4Bit-LED Digit Tube Module
// 注意:该4位数码管是共阳的!
#include "74HC595.h"
// 码表
const u8 digitTable[] =
{
// 0 1 2 3 4 5 6 7 8 9
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8, 0x80, 0x90,
// A b C d E F -
0x8C, 0xBF, 0xC6, 0xA1, 0x86, 0xFF, 0xbf
};
/*******************************************************************************
* Function Name : HC595_Init
* Description : 初始化HC595
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void HC595_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量
RCC_APB2PeriphClockCmd(HC595_RCC | HC595_RCLK_RCC, ENABLE); //使能HC595的时钟
//74HC595, SCLK RCLK DIO 推挽输出
GPIO_InitStructure.GPIO_Pin = HC595_SCLK_PIN| HC595_DIO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //管脚频率为50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //输出模式为推挽输出
GPIO_Init(HC595_GPIO, &GPIO_InitStructure); //初始化寄存器
GPIO_InitStructure.GPIO_Pin = HC595_RCLK_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //管脚频率为50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //输出模式为推挽输出
GPIO_Init(HC595_RCLK_GPIO, &GPIO_InitStructure); //初始化寄存器
}
/*******************************************************************************
* Function Name : HC595_SendByte
* Description : 发送一个字节
* Input : data
* Output : None
* Return : None
*******************************************************************************/
void HC595_SendByte(u8 data)
{
u8 i;
for (i=8; i>=1; i--)
{
// 高位在前
if (data&0x80)
GPIO_SetBits(HC595_GPIO, HC595_DIO_PIN);
else
GPIO_ResetBits(HC595_GPIO, HC595_DIO_PIN);
data <<= 1;
// SCLK上升沿
GPIO_ResetBits(HC595_GPIO, HC595_SCLK_PIN);
GPIO_SetBits(HC595_GPIO, HC595_SCLK_PIN);
}
}
/*******************************************************************************
* Function Name : HC595_Display
* Description : 显示4位数字(包括小数点)
* Input : num: 0000 - 9999
* dp: 小数点的位置1-4
* Output : None
* Return : 正常返回0,错误返回1
*******************************************************************************/
u8 HC595_Display(u16 num, u8 dp)
{
u8 qian = 0, bai = 0, shi = 0, ge = 0;
// 对显示的参数范围进行检查
if (num > 9999 || dp > 4)
//报错
return 1;
// 对num进行分解
qian = num / 1000;
bai = num % 1000 / 100;
shi = num % 100 / 10;
ge = num % 10;
// 千位
if(dp == 1)
HC595_SendByte(digitTable[qian] & 0x7F);
else
HC595_SendByte(digitTable[qian]);
HC595_SendByte(0x08);
GPIO_ResetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
GPIO_SetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
// 百位
if(dp == 2)
HC595_SendByte(digitTable[bai] & 0x7F);
else
HC595_SendByte(digitTable[bai]);
HC595_SendByte(0x04);
GPIO_ResetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
GPIO_SetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
// 十位
if(dp == 3)
HC595_SendByte(digitTable[shi] & 0x7F);
else
HC595_SendByte(digitTable[shi]);
HC595_SendByte(0x02);
GPIO_ResetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
GPIO_SetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
// 个位
if(dp == 4)
HC595_SendByte(digitTable[ge] & 0x7F);
else
HC595_SendByte(digitTable[ge]);
HC595_SendByte(0x01);
GPIO_ResetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
GPIO_SetBits(HC595_RCLK_GPIO, HC595_RCLK_PIN);
return 0;
}
接下来就可以把重心都放在STM32的SPI外设上了,首先需要读一下STM32F10x的参考手册的SPI(串行外设接口)部分,这样对SPI就可以有较好的理解,比较重要的是要看懂SPI的结构框图和主从机通信的示意图,如下:
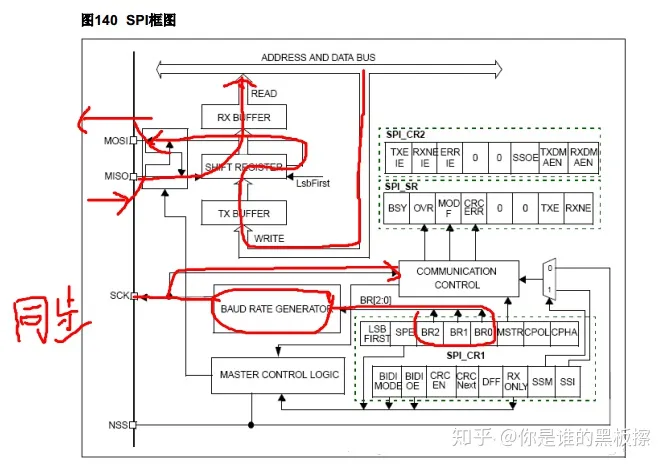
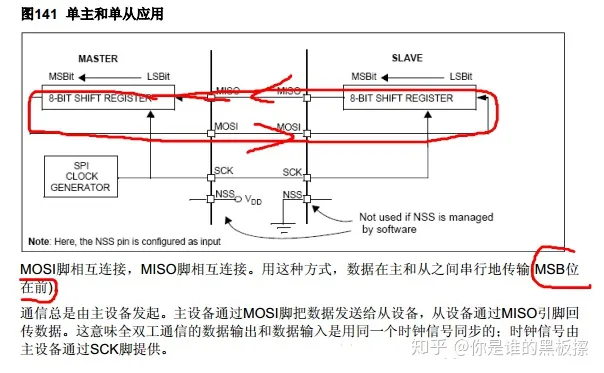
这个理解以后,我们就可以参考《STM32F103XX固件库用户手册》的SPI部分来实现STM32的SPI外设配置和收发数据了,具体代码如下:
头文件74HC595_SPI.h
#ifndef __74HC595_SPI_H__
#define __74HC595_SPI_H__
#include"stm32f10x_lib.h" //包含所有的头文件
#include
// 4-Bit LED Digital Tube Module
// 引脚 // SPI1 4位数码管
#define HC595_NSS_PIN GPIO_Pin_4 // SPI1_NSS 未用
#define HC595_SCK_PIN GPIO_Pin_5 // SPI1_SCK SCLK
#define HC595_MISO_PIN GPIO_Pin_6 // SPI1_MISO 未用
#define HC595_MOSI_PIN GPIO_Pin_7 // SPI1_MOSI DIO
#define HC595_RCLK_PIN GPIO_Pin_12 // RCLK
// 端口
#define HC595_SPI1_GPIO GPIOA
#define HC595_RCLK_GPIO GPIOB
// 时钟
#define HC595_SPI1_RCC RCC_APB2Periph_GPIOA
#define HC595_RCLK_RCC RCC_APB2Periph_GPIOB
void HC595_Init(void);
void HC595_SendByte(u8 data);
u8 HC595_Display(u16 num, u8 dp);
#endif
源文件74HC595_SPI.c
/************************省略部分代码见(74HC595.c)************************/
/*******************************************************************************
* Function Name : HC595_Init
* Description : 初始化HC595
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void HC595_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure; // 声明一个结构体变量
// 不需要开启AFIO时钟
RCC_APB2PeriphClockCmd(HC595_SPI1_RCC | HC595_RCLK_RCC | RCC_APB2Periph_SPI1, ENABLE); // 使能HC595及SPI1的时钟
//74HC595, SPI1_NSS、SPI1_SCK、SPI1_MOSI
GPIO_InitStructure.GPIO_Pin = HC595_NSS_PIN | HC595_SCK_PIN |HC595_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 管脚频率为50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 输出模式为复用推挽输出
GPIO_Init(HC595_SPI1_GPIO, &GPIO_InitStructure); // 初始化寄存器
//74HC595, SPI1_MISO
GPIO_InitStructure.GPIO_Pin = HC595_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 输入模式为浮空输入
GPIO_Init(HC595_SPI1_GPIO, &GPIO_InitStructure); // 初始化寄存器
//74HC595, RCLK
GPIO_InitStructure.GPIO_Pin = HC595_RCLK_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 管脚频率为50MHZ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 输出模式为复用推挽输出
GPIO_Init(HC595_RCLK_GPIO, &GPIO_InitStructure); // 初始化寄存器
/* Initialize the SPI1 according to the SPI_InitStructure members */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
// 第一步:设置主从模式和通信速率
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
// SPI_NSS_Hard时需要外部电路把NSS接VCC, SPI_NSS_Soft时SPI外设会将SSM和SSI置位
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
// 实测波特率最低为SPI_BaudRatePrescaler_8,否则出错
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
// 第二步:设置数据格式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
// MSB在前还是LSB在前要根据码表和数码管与74HC595的接法来定
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
// 第三步:设置时钟和极性
// 当SPI_CPOL_Low且SPI_CPHA_2Edge出错
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
//第四步:其它,CRC校验,可靠通信,这步可以不设置
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
/* Enable SPI1 */
SPI_Cmd(SPI1, ENABLE);
}
/*******************************************************************************
* Function Name : HC595_SendByte
* Description : 发送一个字节
* Input : data
* Output : None
* Return : None
*******************************************************************************/
void HC595_SendByte(u8 data)
{
SPI_I2S_SendData(SPI1, data);
while(!SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE));
}
/************************省略部分代码(见74HC595.c)************************/
这样就大工告成啦,STM32的SPI外设还是比较简单的,尤其是通过库函数来调用。用数码管模块这种简单的可视化工具,我们就可以更好的研究通信协议本身的特性啦,这种方式在后续学习其他的通讯协议也是可以的。
史海拾趣
|
有用过BISS0001红外热释电处理芯片的吗?现金交易,找人做开发 有用过BISS0001红外热释电处理芯片的吗?现金交易,找人做开发。 可先看看这个http://www.xie-gang.com/ot0001.htm QQ:184949533 Email:genens@126.com… 查看全部问答> |
|
我的毕设是基于ARM11的蓝牙音频网关的设计与实现,用的是辰汉电子i.mx31 MDK开发板,里面要写入linux操作系统,现在要买一个蓝牙适配器接在它上面来与手机通信,但是了解到一些蓝牙适配器好像都是支持WINDOWS操作系统,只有一款水木行SMH-BT555写着支持l ...… 查看全部问答> |
|
我的电脑每次关机后都不能启动显示的是(因以下文件的损坏或者丢失windows无法启动windows\\system32\\c_936.nis)每次装了系统后只要1关机就会出现这种情况,请问一下怎么解决啊,是不是硬盘有了物理坏道了… 查看全部问答> |
|
硬件特性 (主版) -------------------------------------------------------------------------------- 硬 件 部 件 功 能 描 述 备 注 主板类型 5.25”单板结构 主处理器 Atmel AT91RM9200(PQFP) A ...… 查看全部问答> |
|
我要做一块数据采集卡,卡上有两个通道,分别是一个模拟输入通道和一个模拟输出通道。和计算机通讯 采用USB的方式。具体的要求如下 1.一个模拟输入通道,精度16位,最高采样率1M/s(可设置),采集范围可设,量程(-10到+10V,-5到+5V,-2.5到+ ...… 查看全部问答> |