


无刷电机霍尔传感器位置及电机旋向确认方法研究
2022-11-18 来源:elecfans
摘 要:
ABSTRACT
针对三相全波六状态工作无刷直流电机霍尔位置及特定换相逻辑下的电机旋向问题,提出一种通过右手螺旋定则确定每相绕组磁势方向进而确定电机霍尔位置,随后通过左手定则及牛顿第三运动定律对电机旋向进行判断的简易方法;并通过两款电机实际工程验证,确定该方法的正确性及普遍适用性。
0 引言
无刷直流电机与有刷直流电机相比,不会产生有刷电机换相火花现象以及随之带来的电刷磨损问题,具有寿命长、噪声低、免维护等优点[1],因此其在空间飞行器领域广泛运用,并逐步取代了传统有刷直流电机。由于无刷直流电机通过逻辑开关电路实现电子换相,因此其需要位置传感器对转子磁极位置进行检测,以保障电子换相的准确性。霍尔位置传感器由于结构简单、易集成、占地小等优势,目前使用率最高[2]。精确确认霍尔传感器位置是确保电机高效运行的关键所在,本文主要对目前常用的三相全波六状态工作方式绕组星形连接的无刷直流电机霍尔传感器正确位置及电机旋向确认方法进行介绍,并结合工程实际案例进行说明。
JIDIANXINXI
1 霍尔传感器位置及电机旋向确认方法
由于影响霍尔传感器位置的因素众多,为简化分析方法,下文分析基于如下约定:
(1)示例电机所选霍尔器件为锁存型霍尔器件,其逻辑1和逻辑0各占180°电角度;
(2)霍尔标志面朝向磁钢N极时输出逻辑1,朝向磁钢S极时输出逻辑0;
(3)霍尔信号跳变至对应逻辑状态时,相关绕组同时导通;
(4)示例电机铁芯为直槽结构,针对斜槽电机,根据斜槽方式的不同,磁势需旋转斜槽角度的一半,具体旋转为从出线端看,同一槽如果轴伸端槽口位于出线端槽口左侧则逆时针旋转,如果轴伸端槽口位于出线端槽口右侧则顺时针旋转。
1.1 电枢绕组图绘制
在绘制电枢绕组磁势向量星形图前需绘制电机电枢绕组图。工程上,电枢绕组图可根据工程仿真软件所绘绕组分布图直接画出,本文依据Ansoft仿真软件中绕组分布图进行绘制。Ansoft所示绕组分布图视图方向为从电机轴伸端视之,绕组分布图中相序标记前为“-”表示电流方向为垂直纸面流入,相序标记前无符号表示电流方向为垂直纸面流出。
图1所示为4极12槽整数槽电机绕组分布图,图2所示为20极18槽分数槽电机绕组分布图。
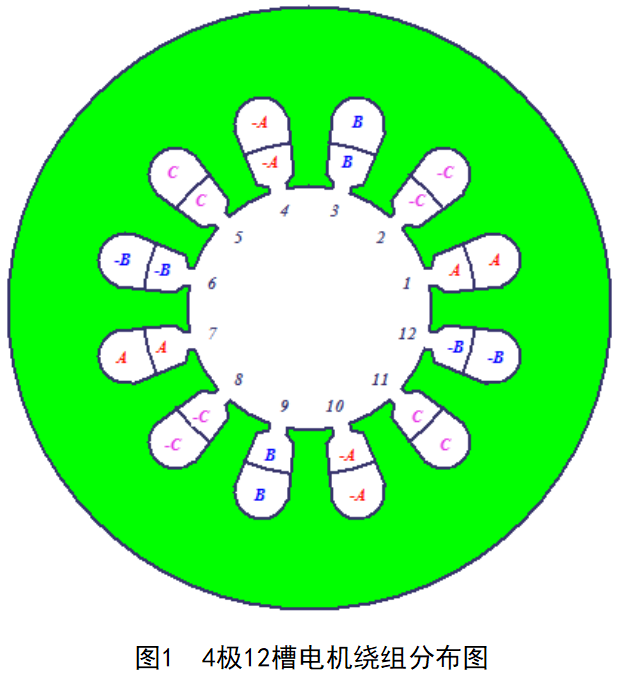
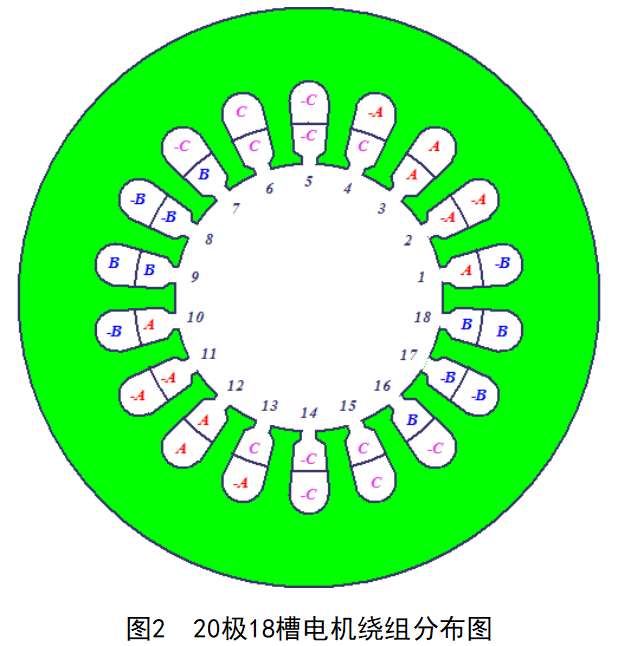
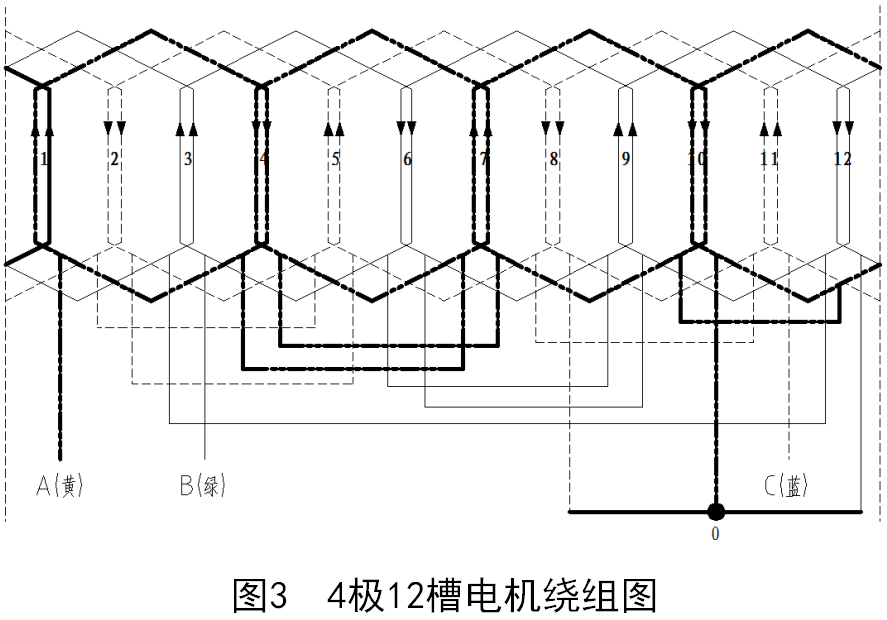
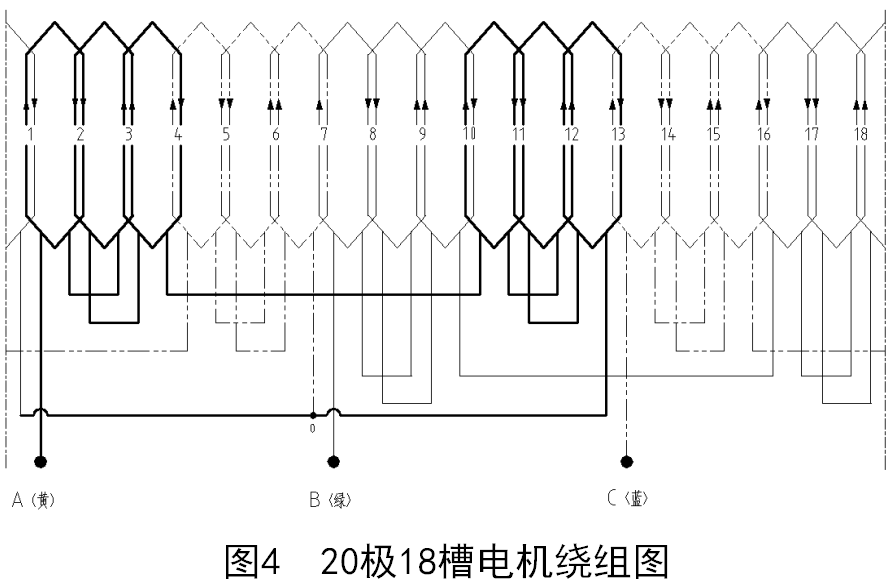
根据绕组分布图及Ansoft中电流方向定义可绘制两款电机电枢绕组图,分别如图3、图4所示,图中箭头方向为电流方向,序号表示铁芯槽号。
1.2 绕组磁势图绘制
通过分析,电机霍尔传感器位置位于磁势轴线上,对于三相无刷电机,无论其绕组结构如何,在1对极下,共有两组6个霍尔传感器位置可供选择[3-4]。霍尔HA、HB、HC分别位于磁势FB、FC、FA或-FB、-FC、-FA位置[5]。
通过图3所示绕组图及右手螺旋定则可绘制出图5所示的4极12槽电机A相绕组磁势图,磁势图视图方向为电机尾部出线端视之。其中1槽及7槽代表A相电流垂直纸面流入,4槽及10槽代表A相电流垂直纸面流出。同理,可将该4极12槽电机绕组磁势全部绘出,如图6所示。
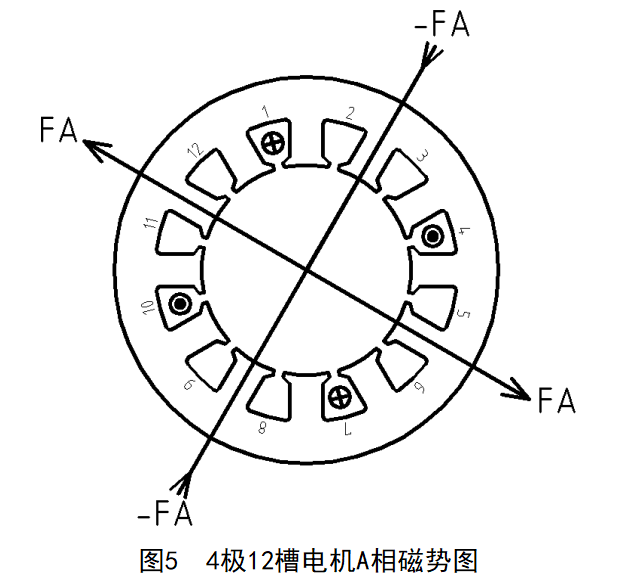

进一步观察可以发现,对于整数槽电机,各相磁势皆位于各齿中心线,由于三相电机1对极下存在6个霍尔传感器位置,因此所有齿中心线为该类电机所有允许分布的霍尔传感器位置。
对于分数槽集中绕组电机,由于三相绕组未均匀间隔分布,因此需要通过矢量合成方式绘制三相绕组每相合成磁势,随后通过阵列的方式绘出所有磁势方向。通过图4所示绕组图及右手螺旋定则可绘制出图7所示的20极18槽电机绕组合成磁势图,磁势图视图方向为电机尾部出线端视之。通过阵列方式可绘制该电机所有磁势,如图8所示。
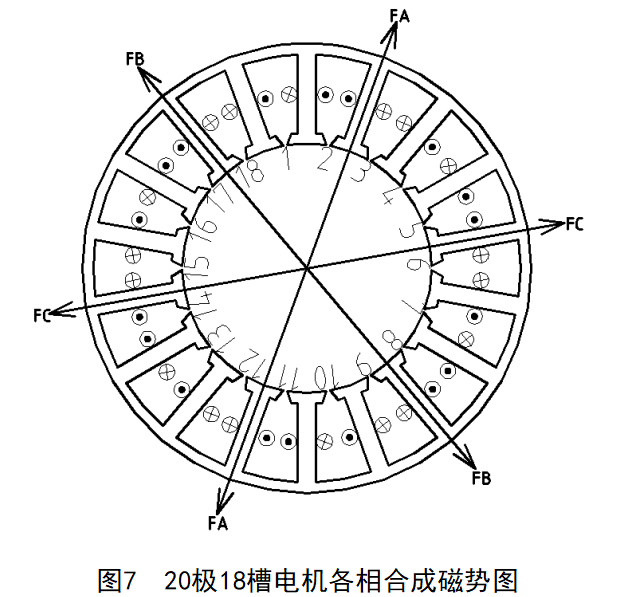

通过观察示例电机磁势图可以发现,相邻两磁势间方向相反,A、B、C三相磁势依次交替分布。对于极对数较多的情形,可通过该结论判断磁势图绘制的正确性。
1.3 电机旋转方向
通过上文分析拟选定两款电机,霍尔传感器位置分别如图9、图10所示,20极18槽电机为霍尔双备份结构。


针对两相导通三相六状态电机,目前常用控制器换相逻辑如表1所示。

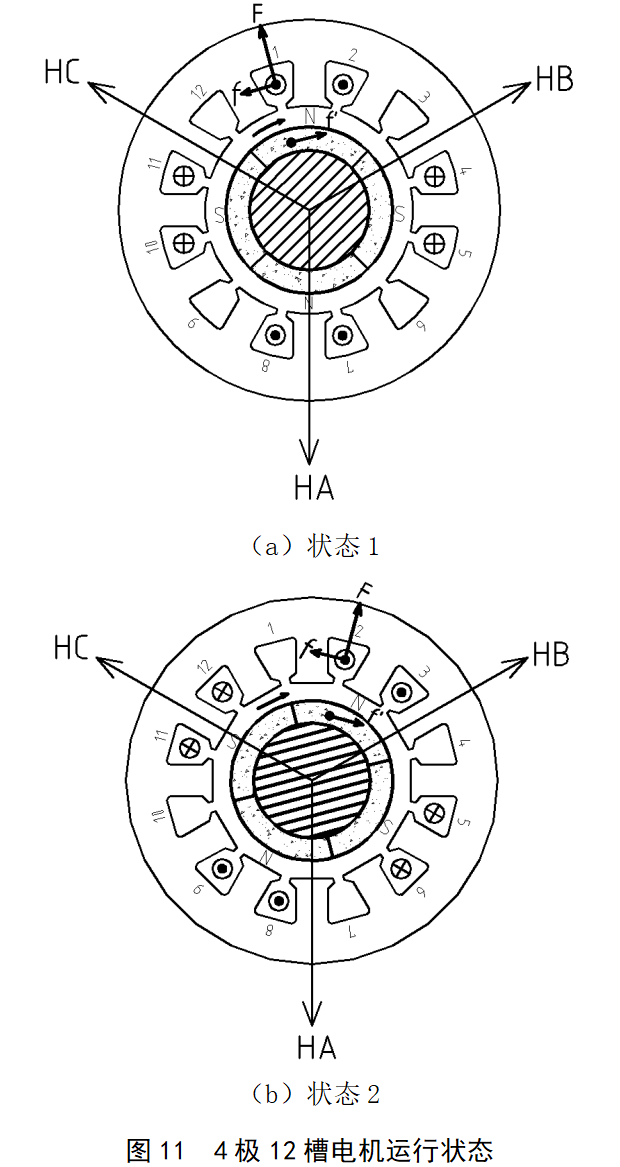
假定4极12槽电机转子初始位置如图11(a)所示。该电机霍尔标志面背对磁钢,此时霍尔HA、HB、HC输出真值为011,绕组电流由C相通至A相,A相、C相所在槽电流方向为1槽、2槽、7槽、8槽垂直纸面流出,4槽、5槽、10槽、11槽垂直纸面流入。状态1时磁钢N极与1槽相对,槽中导体磁场方向为F,根据左手定则,此时槽中导体所受电磁力方向为f,根据牛顿第三运动定律,施加于转子磁钢上的反作用力方向为f′。同理,可对其他槽内导体进行分析,此时电机转子呈现图示顺时针方向运动趋势。当转子运行至图11(b)所示状态2,此时霍尔HA、HB、HC输出真值为001,槽内电流方向及转子受力方向如图11(b)所示,经分析电机仍保持顺时针方向运动。通过上述方法可对电机6个状态进行分析,出线端视之电机皆顺时针运行。因此,当电机霍尔传感器处于图9所示位置,电机按表1所示真值进行换相,则出线端视之电机顺时针旋转。
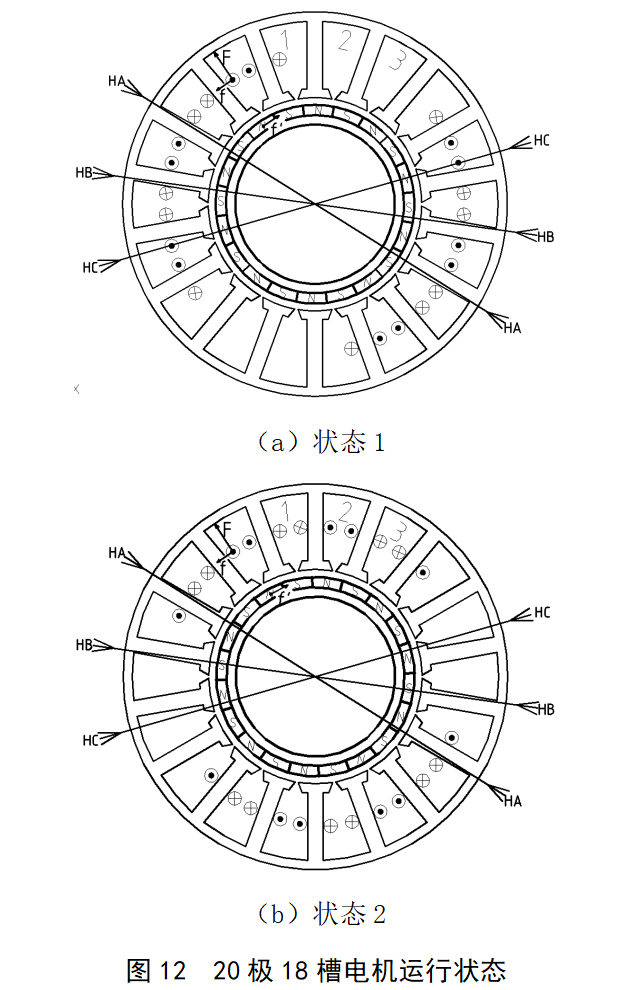
假定20极18槽电机转子初始位置如图12(a)所示,该电机霍尔标志面朝向磁钢,此时霍尔HA、HB、HC输出真值为001,按上述分析方法,此时槽内电流方向及转子受力方向如图12(a)所示,电机转子呈现图示顺时针方向运动趋势。当转子运行至图12(b)所示状态2,此时霍尔HA、HB、HC输出真值为101,槽内电流方向及转子受力方向如图12(b)所示,经分析电机仍保持顺时针方向运动。通过上述方法可对电机6个状态进行分析,出线端视之电机皆顺时针运行。因此,当电机霍尔传感器处于图10所示位置,电机按表1所示真值进行换相,则出线端视之电机顺时针旋转。
JIDIANXINXI
2 实物验证
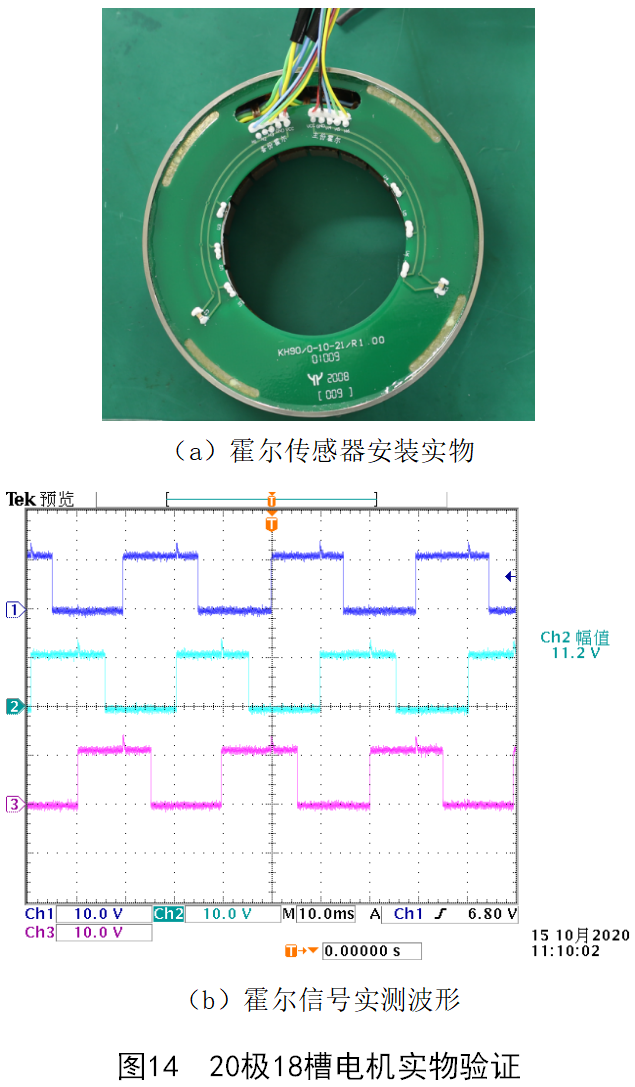
图13(a)及图14(a)分别为两款电机霍尔传感器实际安装位置示意图,安装位置与理论分析位置一致。图13(b)及图14(b)为两款电机出线端顺时针运行时霍尔传感器输出波形,波形从上到下依次为霍尔HA、HB、HC输出波形,霍尔真值变化情况与分析结果一致。

JIDIANXINXI
3 结语
本文通过上述两个例子,验证了上述霍尔传感器位置及电机旋向确认方法的准确性。针对两相导通三相六状态电机,无论是整数槽绕还是分数槽绕,上述方法均具有普遍适用性。上述方法所得出的霍尔传感器位置为该类电机所有霍尔传感器位置,实际运用过程中可根据空间结构、尺寸等限制条件选取满足要求的霍尔传感器位置。
-

PX4固件二次开发课程
-

RISC-V嵌入式系统开发
-

NuttX Workshop 2024
-

自己动手写操作系统
-

SOC系统级芯片设计实验
-

自己动手做一台计算机
-

PIC单片机控制的遥控防盗报警器电路
-

红外线探测报警器
-

短波AM发射器电路设计图
-

使用ESP8266从NTP服务器获取时间并在OLED显示器上显示
-

开关电源的基本组成及工作原理
-

带有短路保护系统的5V直流稳压电源电路图