



历史上的今天
今天是:2025年06月10日(星期二)

2018年06月10日 | STM32-串口通信printf重定向
2018-06-10 来源:eefocus
前言:平时我们进行c语言编程的时候会经常用到printf函数进行打印输出,来调试代码。可是这个printf函数C库已经帮我们实现好了,通常只需要直接调用即可,但是如果在一个新的开发平台,如果库没有帮我们实现好,比如STM32开发板,那么我们怎么实现printf打印输出呢?
首先我们来了解一下串口通信!
1、什么是串口通信?
串口通信(Serial Communication),是指外设和计算机间,通过数据信号线、地线等,按位进行传输数据的一种通讯方式。
串口是一种接口标准,它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。
2、串口通信协议
在串口通信中,常用的协议包括RS-232、RS-422和RS-485。
•RS-232:标准串口,最常用的一种串行通讯接口。有三种类型(A,B和C),它们分别采用不同的电压来表示on和off。最被广泛使用的是RS-232C,它将mark(on)比特的电压定义为-3V到-12V之间,而将space(off)的电压定义到+3V到+12V之间。传送距离最大为约15米,最高速率为20kb/s。RS-232是为点对点(即只用一对收、发设备)通讯而设计的,其驱动器负载为3~7kΩ。所以RS-232适合本地设备之间的通信。
•RS-422:最大传输距离为1219米,最大传输速率为10Mb/s。其平衡双绞线的长度与传输速率成反比,在100kb/s速率以下,才可能达到最大传输距离。只有在很短的距离下才能获得最高速率传输。一般100米长的双绞线上所能获得的最大传输速率仅为1Mb/s。
•RS-485:从RS-422基础上发展而来的,最大传输距离约为1219米,最大传输速率为10Mb/s。平衡双绞线的长度与传输速率成反比,在100kb/s速率以下,才可能使用规定最长的电缆长度。只有在很短的距离下才能获得最高速率传输。一般100米长双绞线最大传输速率仅为1Mb/s。
3、同步通信?异步通信?
同步通信:是一种比特同步通信技术,要求发收双方具有同频同相的同步时钟信号,只需在传送报文的最前面附加特定的同步字符,使发收双方建立同步,此后便在同步时钟的控制下逐位发送/接收。如:SPI总线,I2C总线。
异步通信:指两个互不同步的设备通过计时机制或其他技术进行数据传输。也就是说,双方不需要共同的时钟。发送方可以随时传输数据,而接收方必须在信息到达时准备好接收。如:串口(USART)
4、通信方式
•单工模式(Simplex Communication):单向的数据传输。通信双方中,一方为发送端,一方则为接收端。信息只能沿一个方向传输,使用一根传输线。双方是固定的。
•半双工模式(Half Duplex):通信使用同一根传输线,既可以发送数据又可以接收数据,但不能同时进行发送和接收。数据传输允许数据在两个方向上传输,但是,在任何时刻只能由其中的一方发送数据,另一方接收数据。
•全双工模式(Full Duplex)通信允许数据同时在两个方向上传输。因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。在全双工模式中,每一端都有发送器和接收器,有两条传输线,信息传输效率高。
5、数据格式
(1)起始位:起始位必须是持续一个比特时间的“0”,标志传输一个字符的开始。
(2)数据位:数据位紧跟在起始位之后,是通信中的真正有效信息。数据位的位数可以由通信双方共同约定,一般可以是5位、7位或8位。传输数据时先传送字符的低位,后传送字符的高位。
(3)奇偶校验位:奇偶校验位仅占一位,用于进行奇校验或偶校验,奇偶检验位不是必须有的。如果是奇校验,需要保证传输的数据总共有奇数个“1”;如果是偶校验,需要保证传输的数据总共有偶数个“1”
(4)停止位:停止位可以是是1位、1.5位或2位,可以由软件设定。它一定是“1”,标志着传输一个字符的结束。
了解了串口通信的基础知识之后,我们再来看看STM32开发板上是如何实现串口通信的,我以实现printf重定向为例来进行分析!
先看代码:
main.c:
#include "printf.h"
int main()
{
printf_init();
printf("\nhello!every body!\n");
printf("I am zoulei\n");
printf("serial communications is so mystical and interesting!\n");
printf("keep striving!\n");
}
printf.c:
#include "printf.h"
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h"
#include "misc.h"
int fputc(int ch,FILE *f)
{
while(USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET);
USART_SendData(USART2,(unsigned char)ch);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET);
return (ch);
}
void printf_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/*config USART clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2,ENABLE);
/*USART1 GPIO config*/
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_IN_FLOATING; //复用开漏输入
GPIO_Init(GPIOA,&GPIO_InitStructure);
/*USART1 mode Config*/
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2,&USART_InitStructure);
USART_Cmd(USART2,ENABLE);
printf.h:
#ifndef __printf_H
#define __printf_H
#include "stm32f10x.h"
#include
void printf_init(void);
int fputc(int ch,FILE *f);
#endif
代码分析:
1.串口初始化配置
学了STM串口通信之后,我们知道配置串口通信至少要配置:字长(一次传送的数据长度),波特率(每秒传输的数据位数),奇偶校验位,还有停止位。当然我在
配置过程中把他们分别设为8,115200,No ,1。
串口的配置主要与USART_InitTypeDef这个结构体有关,里面存放了控制参数成员:
typedef struct
{
uint32_t USART_BaudRate; //波特率
uint16_t USART_WordLength; //字长
uint16_t USART_StopBits; //停止位
uint16_t USART_Parity; //奇偶校验位
uint16_t USART_Mode; // 收发数据使能或失能
uint16_t USART_HardwareFlowControl; //硬件控制流
} USART_InitTypeDef;
其实在学习32的时候,一般如果要用到32的内设或者外设,都要进行相应的初始化,也就是相应的结构体成员进行配置,而我们本次要实现的printf重定向,也
就用到了串口,所以也要对串口进行初始化!而我是用的USART2,所以要对其进行相应的配置。
查看STM32硬件原理图:
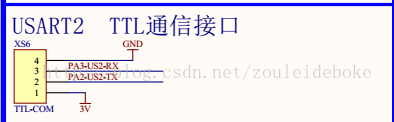
由原理图可知,这个串口是支持TTL电平的,接收数据RX是接在PA3管脚上的,发送数据是接在PA2上的。由于我是要输出到PC上的串口终端,所以PA2要
设为复用推挽输出模式,PA3设为复用开漏输入模式。
查看stm32f10x_it.c这个代码可知USART2是挂接在APB1总线上的,GPIO是挂在APB2总线上的,如下所示:
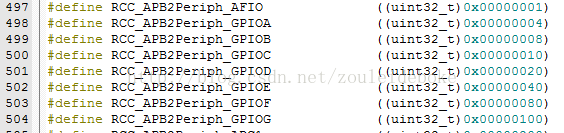

所以我们在进行时钟初始化的时候要特别注意。
2.printf重定向
其实printf重定向就是我们将printf重新定向到串口,也就是我们可以自己重写C的库函数,当连接器检查到用户编写了与C库函数相同的名字,优先采用
用户编写的函数这样用户就可以实现对库的修改了。
printf函数实际是一个宏,最终调用的是 fputc(int ch,FILE *f)这个函数,所以我们需要修改这个函数。
下面我们着重分析一下fputc函数:
这个库函数调用了两个ST库函数,分别是:USART_GetFlagStatus()与USART_SendData(),形参ch表示串口将要发送的数据,也就是说。当使用printf()时,它先调用fpuc()函数,然后使用ST库的串口发送函数USART_SendData(),把数据转移到发送数据寄存器TDR.触发我们的串口向PC发送一个相应的数据,调用完USART_SendData()之后,
使用 while(USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET)语句不停的检查串口的数据是否发送完成的标志位TC,一直检查到标志为“完成”,才进行下一步操作,
要注意的是USART_SendData()每次只发送一个字节的数据!
注意:由于fputc()函数的形参调用了C库的FILE,所以在程序中加入stdio.h这个头文件,便且在keil的编译器的设置中勾选Use MicroLIB(使用微库)
3.硬件连接
首先硬件上我们将USB转串口线的TXD,RXD,GND,分别接在32开发板USART2上的RXD,TXD,GND。
由于USART2是TTL电平,所以我们用的usb转串口线一定要是支持TTL电平的,否则串口通信不上!
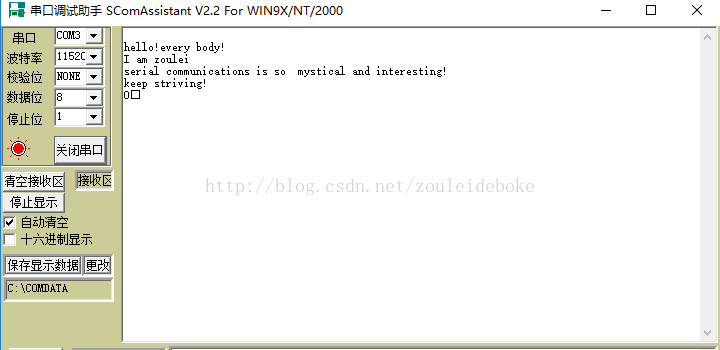
4.效果图
串口调试助手显示:
史海拾趣
|
Linux内核IP Queue机制的分析(三)——ip_queue内核模块的分析 序 笔者将会通过包括本文在内的三篇文章,对IP Queue机制从用户态的应用到内核态的模块程序设计进行分析。三篇文章的题目分别是: Linux内核IP Queue机制的分析(一)——用户态接收数据包 Linux内核IP Queue机制的分析(二)—— ...… 查看全部问答> |
|
求助:我通过platform builter5.0下载WINCE nk.bin文件到ARM板中,提示如下错误: Warning: Debugger service map is set to none. If your image has debugging support it may not boot properly. Cannot access selecte ...… 查看全部问答> |
|
本人在做一个硬件项目的软件方面的东西,现在遇到一个问题,请求解决。 是一个主板连接一个MCU,由MCU控制内存的电压调节或超频从而测试内存的性能。 现在要在DOS下,使用MCU去超频。假如死机,利用superIO的watchdog功能,发出一个信号告诉MCU, ...… 查看全部问答> |
|
MicriumuC/OS-IIforSTM32官方移植的问题与解决 Micrium uC/OS-II for STM32官方移植包的下载在:http://www.micrium.com/st/STM32.html但这个移植包里有一点问题,主要是上下文切换函数OSCtxSw和OSIntCtxSw里没有保护R4和R5寄存器的值,详见dy008的帖子里跟帖的讨论。Micriu ...… 查看全部问答> |
|
关于用JLINK调试博创UP-TECH2410板子目标板自动重启的问题的解决方法 问题是这样的大概一个月前,我在IAR6.1上建了一个S3C2410的工程,我这边有两种板子,一块优龙FS2410板子,两块博创UP-TECH2410的板子,对应的也有两种调试器,优龙的使用的是DragonJtag,一端跟电脑的并口相连接,一端连接板子的JTAG接口,优龙的板 ...… 查看全部问答> |
|
XDS510 100元 KL05Z 开发板,全新. 50元 串口服务器,全新,带光盘. 50元 M动力 F28035开发板,加焊485芯片 100元. 测试样品 推挽正激加并网. 200元. ...… 查看全部问答> |
|
如何利用MSP430对一个4-20mA信号与给定值进行比较,然后驱动灯泡亮灭,并将信号给上位机。 是利用MSP430的比较器呢?还是如何操作?谁能给个思路?谢谢!!!!! \0\0\0eeworldpostqq… 查看全部问答> |