



历史上的今天
今天是:2024年08月26日(星期一)
2018年08月26日 | stm32之GPIO的理解
2018-08-26 来源:eefocus
GPIO中的常用的寄存器
GPIOx_CRH 与GPIOx_CRL : 可以配置GPIO的各种模式,进行初始化。
GPIOx_BSRR : 32位寄存器,可以写入或清除1/0
GPIOx_IDR : 低16位寄存器,读取IO的电平
GPIOx_ODR :低16位寄存器,写入IO的电平
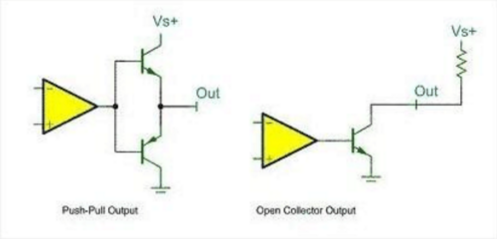
输出模式中包含
通用推挽输出:可以输出高低电平
通用开漏输出:不能输出高电平,需要外接上拉电阻
复用推挽输出:复用功能时,同上
复用开漏输出:复用功能时,同上
用一幅最简单的图形来概括:
输入模式中包含
模拟输入模式:输入的是模拟量(用于ADC等)
浮空输入模式:浮空输入状态下,IO的电平状态是不确定的,完全由外部输入决定(一般用于各种通信协议)
上拉/下拉输入模式:比较容易理解
通过对寄存器的操作就可以实现IO口的操作了。
对IO口进行宏定义
对库函数进行宏定义
#define LED1_OFF GPIO_SetBits(GPIOB,GPIO_Pin_0)
#define LED1_ON GPIO_ResetBits(GPIOB,GPIO_Pin_0)
1
2
对寄存器进行宏定义
/* 直接操作寄存器的方法控制IO */
#define digitalHi(p,i) {p->BSRR=i;} //设置为高电平
#define digitalLo(p,i) {p->BRR =i;} //输出低电平
#define digitalToggle(p,i) {p->ODR ^=i;} //输出反转状态
/* 定义控制IO的宏 */
#define LED1_TOGGLE digitalToggle(GPIOB,GPIO_Pin_0)
#define LED1_OFF digitalHi(GPIOB,GPIO_Pin_0)
#define LED1_ON digitalLo(GPIOB,GPIO_Pin_0)
位带操作的宏定义
首先引用正点原子中sys.h中的代码
//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
位带别名区把每个比特膨胀成一个 32 位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。

位带操作可以使用普通的加载/存储指令来对单一的比特进行读写,实现原子操作。
优势在于:`
位带操作对于硬件 I/O 密集型的底层程序最有用处,操作方便,速度快。
在多任务中,用于实现共享资源在任务间的“互锁”访问。
史海拾趣
|
中国的汽车产业在今年很有可能触及或跨越年产销一千万辆这个门槛,事实上在实现这个目标以前,中国就已经成为仅次于美国的全球第二大汽车市场。在当前的汽车中,汽车电子系统所占的比重越来越大,很多特色化的功能都是依赖汽车电子技术来实现的,如 ...… 查看全部问答> |
|
我是新手,以前都是跟着导师做单片机的。感觉单片机有点“不过瘾”的感觉,想往高深的学。想学linux下嵌入式编程,但是身边又没有的这方面的资源。于是想买一块开发板子。请问:淘宝上的那种便宜的开发板比如像2410、2440板子能买不?? 问题1:开 ...… 查看全部问答> |
|
本人在校学生,最近做的项目都用到了一些驱动的开发,感觉底层这方面的编程比普通的软件开发难度大一点。如果是软件公司招聘的话,他们会招聘新手吗?个人感觉做这方面的真正开发,都是有多年经验的老手。… 查看全部问答> |
|
三、伺服系统调试 接通伺服驱动器的电源, 先进入测试调整模式,测试调整模式可以执行伺服驱动器的测试操作,报警复位和参数编辑等等.其数字操作器的按键说明如表1: 键 出现的情况 MOD 在不同模式 ...… 查看全部问答> |
|
2812调试时关于看门狗的一些问题 大家好, 我目前正在调试一块自己做的2812的板子,遇到关于看门狗的一些问题: 一点连续运行按钮程序就跳到3FFC00处(此处应该是复位向量),而点单步运行的时候程序可以走的.点连续运行的时候用示波器观察reset引脚,发 ...… 查看全部问答> |
|
单片机的接收端是连接的GPS信号, 发送端连接的是GPRS的接收。 单片机就是把收到的经纬度找出来传给GPRS,用UDP发送。 只要不连GPS, 发送的数据就完全正确。 连了GPS之后,数据就乱了,GPS是一直在发送,速度很快 #include #include #incl ...… 查看全部问答> |