



历史上的今天
今天是:2024年08月22日(星期四)
2019年08月22日 | 基于STM32超声波测距
2019-08-22 来源:eefocus
2019年7月26日
做小车的第5天。
今天我又学习了一个新的知识:超声波测距。
超声波测距(超声波测距模块US-025)的基本原理如下:
Trig端:向此管脚输入一个超过10us以上的高电平,可触发模块测距
Echo端:当测距结束时,此管脚会输出一个高电平,电平宽度为超声波往返时间之和。
只需要在Trig管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。当检测到回波信号后,通过Echo管脚输出。
根据Echo管脚输出高电平的持续时间可以计算距离值。即距离值为:(高电平时间*340m/s)/2
当测量距离超过US-025/US-026的测量范围时,仍会通过Echo管脚输出高电平的信号,高电平的宽度约为66ms。
代码大致如下:
/*******************************************************.h函数********/
#define TRIG_Send PBout(6) //输出端口为PB6
#define ECHO_Reci PBin(7) //输入端口为PB7
float Senor_Using(void);
void TIM3_Int_Init();
/**********************************************.c函数/
uint overcount=0; //记录定时器溢出次数
void TIM3_Int_Init()
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); /时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/*****************************************************************
PA6为输出端 PB6为输入端*****************/
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;//设置为推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_6;
GPIO_Init(GPIOB,&GPIO_InitStruct);
//定时器3初始化
TIM_TimeBaseStructure.TIM_Period = 999; //设置自动重转载值为999
TIM_TimeBaseStructure.TIM_Prescaler =71; //设置预分频系数
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE );//使能制定TIM3中断,允许更新中断
//中断设置
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM3, DISABLE);
}
//下面写测距函数
float Senor_Using(void) //单精度数据类型
{
float length=0,sum=0;
u16 tim;
unsigned int i=0;
//测五次数据计算一次平均值
while(i!=5)
{
PAout(6)=1; //拉高信号,作为触发信号
delay_us(20); //高电平信号超过10us
PAout(6)=0; //等待回响信号
while(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_7)==RESET);
//回响信号到来,开启定时器计数
TIM_Cmd(TIM3,ENABLE);
i+=1; //每收到一次回响信号+1,收到5次就计算均值
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)==SET);//回响信号消失
TIM_Cmd(TIM2,DISABLE);//关闭定时器
tim=TIM_GetCounter(TIM3); //获取计TIM2数寄存器中的计数值
length=(tim+overcount*1000)/58.0; //通过回响信号计算距离
sum=length+sum;
TIM3->CNT=0; //将TIM2计数寄存器的计数值清零
overcount=0; //中断溢出次数清零
delay_ms(100);
}
length=sum/5;
return length; //距离作为函数返回值
}
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3,TIM_IT_Update)!= RESET) //检查是否发生TIM3中断
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清楚中断更新标志
overcount++;
}
}
/*************************main/
int main(void)
{
float length;
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(9600);
TIM3_Int_Init();
while(1)
{
length = Senor_Using(); //调用测距函数
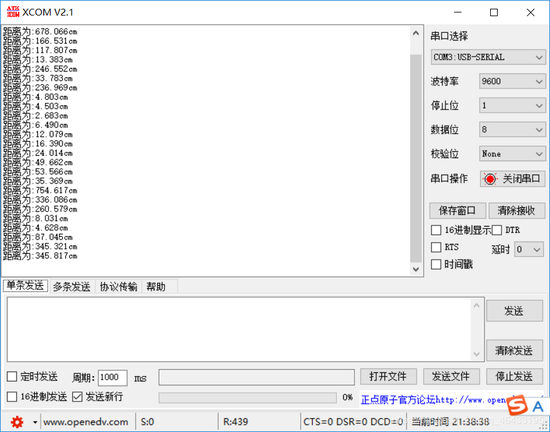
printf(“距离为:%.3fcmn”,length);
delay_ms(1000);
}
}
超声波测距模块原理图以及如下: 串口接收到的数据
串口接收到的数据
史海拾趣
|
小弟现在搞通讯设备,,需要电话线路发送反极信号,但是电信局不给开,现有市场上的反极信号发生器没有检测被叫是否通话完毕挂机的功能,现在小弟高价求方案,或是成品。… 查看全部问答> |
|
本帖最后由 paulhyde 于 2014-9-15 09:24 编辑 之前看到NEC有送开发板的活动,大家使用过程中有什么感触或心得呢? 希望可以贴图出来分享下。 因为我们学校已经有自己的开发板了,所以当时没有申请,但是很想了解下相关的信息。 … 查看全部问答> |
|
电路板系统的互连包括:芯片到电路板、PCB板内互连以及PCB与外部器件之间的三类互连。在RF设计中,互连点处的电磁特性是工程设计面临的主要问题之一,本文介绍上述三类互连设计的各种技巧,内容涉及器件安装方法、布线的隔离以及减少引线电感的措施 ...… 查看全部问答> |
|
大家好: 小弟画了一块板子,现在PCB布线已经搞好,就差覆铜了,不规则覆铜,就是在顶层需要覆铜的地方才覆,不需覆铜的地方不覆,这样板子上覆铜的边缘就不是直线了,请问怎样实现不规则的覆铜,怎样设置,如何操作才能达到效果! ...… 查看全部问答> |
|
真实世界的应用需要真实世界的物理连接,一般来说,这意味着模拟信号要在系统内的某处被数字化处理,以便于微处理器、ASIC或FPGA采集数据并做出决策。 基本选用标准 当选择一款模拟数字转换器(ADC)时,大多数设计师似乎只关注几个主 ...… 查看全部问答> |
|
请问各位高手,我在用MSP430F133单片机实现AD转换的时候,测量输入电压后,程序显示的转换的结果与采用公式计算的结果不符,并且在不同的输入电压下,AD转换的结果并非线性关系,请教各位高手原因在那,以下是我写的程序:(系统采用内部2.5伏参考电 ...… 查看全部问答> |
|
1. 51单片机 P2.5 I/O口上的LED灯一闪一闪: #include <reg51.h>sbit led0=P2^5; void delay () { unsigned int a; a=50000; while (a--); } void main (main){ vo ...… 查看全部问答> |