



历史上的今天
今天是:2024年10月28日(星期一)

2019年10月28日 | STM32F103RC USART2串口查询方式接收数据
2019-10-28 来源:eefocus
现有一个小需求,使用STM32F1系列单片机做串口2的收发数据的功能,通过PC上的串口调试助手给单片机发一串数据,单片机收到数据后再给PC的串口调试助手发回去。
看似简单的功能,调试了好久才调好,记录一下供大家参考。
STM32使用USART2,对应单片机的PA1控制方向,PA2发送,PA3接收。
代码如下:
z_hardware_usart2.h
#ifndef __STM32F10X_H
#define __STM32F10X_H
#include "stm32f10x.h"
#endif
#ifndef __Z_UTIL_TIME_H
#define __Z_UTIL_TIME_H
#include "z_util_time.h"
#endif
#ifndef _UART_BUF_LEN_512
#define _UART_BUF_LEN_512 512
#endif
#ifndef _UART_BUF_LEN_256
#define _UART_BUF_LEN_256 256
#endif
#ifndef _UART_COMM_CH_TIMEOUT_3MS
#define _UART_COMM_CH_TIMEOUT_3MS 3
#endif
#ifndef _UART_COMM_CH_TIMEOUT_2MS
#define _UART_COMM_CH_TIMEOUT_2MS 2
#endif
#ifndef _UART_COMM_INT_TIMEOUT_300MS
#define _UART_COMM_INT_TIMEOUT_300MS 300
#endif
#ifndef _UART_COMM_INT_TIMEOUT_500MS
#define _UART_COMM_INT_TIMEOUT_500MS 500
#endif
void init_hardware_usart2(u32 bound);
void func_usart2_send_a_byte(u8 abyte);
u8 func_usart2_recv_a_byte(u8 *recv_data);
void func_usart2_send_bytes(u8 *bytes, u8 bytes_len);
u8 func_usart2_recv_bytes(const u16 BUF_MAX_LEN, u8 *recv_datas, u16 *recv_datas_len, const u16 int_timeout_ms, const u8 ch_timeout_ms);
z_hardware_usart2.c
#ifndef __Z_HARDWARE_USART2_H
#define __Z_HARDWARE_USART2_H
#include "z_hardware_usart2.h"
#endif
void init_hardware_usart2(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = bound;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);
USART_Cmd(USART2, ENABLE);
USART_ClearFlag(USART2, USART_FLAG_TC);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
void func_usart2_send_a_byte(u8 abyte)
{
while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
USART_SendData(USART2, abyte);
while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
}
u8 func_usart2_recv_a_byte(u8 *recv_data)
{
if(USART_GetFlagStatus(USART2, USART_FLAG_RXNE) != RESET)
{
*recv_data = USART_ReceiveData(USART2);
USART_ClearFlag(USART2, USART_FLAG_RXNE);
return 0;
}
return 1;
}
void func_usart2_send_bytes(u8 *bytes, u8 bytes_len)
{
u8 i;
GPIO_SetBits(GPIOA, GPIO_Pin_1);
for(i = 0; i < bytes_len; i++)
{
func_usart2_send_a_byte(bytes[i]);
}
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
u8 func_usart2_recv_bytes(const u16 BUF_MAX_LEN, u8 *recv_datas, u16 *recv_datas_len, const u16 int_timeout_ms, const u8 ch_timeout_ms)
{
u8 flag_recv;
u8 tmp_recv;
u16 tmp_int_timeout_cnt = 0;
u8 tmp_ch_timeout_cnt = 0;
u16 len_recv = 0;
u8 *p_recv;
p_recv = recv_datas;
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
for(;func_usart2_recv_a_byte(&tmp_recv) != 0;)
{
tmp_int_timeout_cnt ++;
if(tmp_int_timeout_cnt > int_timeout_ms * 10)
{
return 1;
}
delay_us(100);
}
len_recv ++;
*p_recv = tmp_recv;
p_recv ++;
for(;;)
{
flag_recv = func_usart2_recv_a_byte(&tmp_recv);
if(flag_recv == 0)//data recv
{
tmp_ch_timeout_cnt = 0;
len_recv ++;
*p_recv = tmp_recv;
p_recv ++;
}
else //data not recv
{
tmp_ch_timeout_cnt ++;
delay_us(800);//FIXME 适用9600波特率。波特率不同需要针对性修改
}
if(tmp_ch_timeout_cnt > ch_timeout_ms)
{
*recv_datas_len = len_recv;
return 0;
}
if(len_recv > BUF_MAX_LEN - 1)
{
*recv_datas_len = BUF_MAX_LEN - 1;
return 2;
}
}
}
z_util_time.h
#ifndef __STM32F10X_H
#define __STM32F10X_H
#include "stm32f10x.h"
#endif
#define AHB_INPUT 72
void delay_us(uint32_t time_us);
void delay_ms(uint32_t time_ms);
z_util_time.c
#ifndef __Z_UTIL_TIME_H
#define __Z_UTIL_TIME_H
#include "z_util_time.h"
#endif
void delay_us(uint32_t time_us)
{
SysTick->LOAD = AHB_INPUT * time_us;
SysTick->VAL = 0x00;
SysTick->CTRL = 0x00000005;
for(;!(SysTick->CTRL & 0x00010000););
SysTick->CTRL = 0x00000004;
}
void delay_ms(uint32_t time_ms)
{
for(;time_ms-- > 0;)
{
delay_us(1000);
}
}
main.c
#include "stm32f10x.h"
#ifndef __Z_HARDWARE_USART2_H
#define __Z_HARDWARE_USART2_H
#include "z_hardware_usart2.h"
#endif
#include int main() { u8 to_recv[_UART_BUF_LEN_256]; u16 to_recv_len; init_hardware_usart2(9600); while (1) { if(func_usart2_recv_bytes(_UART_BUF_LEN_256, to_recv, &to_recv_len, _UART_COMM_INT_TIMEOUT_500MS, _UART_COMM_CH_TIMEOUT_3MS) == 0) { func_usart2_send_bytes(to_recv, to_recv_len); } to_recv_len = 0; memset(to_recv, 0, sizeof(to_recv)); } } 效果如下: 经过测试发现,串口调试助手给单片机发送了1W+多次,失误率为0,准确率可以应用。 测试代码,仅供参考。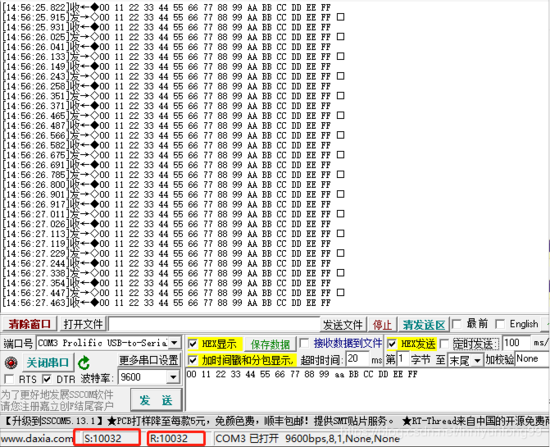
史海拾趣
|
在设计一个9b92的板子,请问之前有人用过别的型号的usb 接口的功能么. 但作为usb device用时,是否一定要把vbus上拉。 我的板不从usb去电,是否可以通过软件在上电后启动usb口进行枚举? 因为我想省下vbus那个脚做io :-),LM的脚的复用的也太 ...… 查看全部问答> |
|
那里可以下到魅族M8和宇龙酷派N90手机的原理图啊?想知道他们用的什么手机基带芯片,他们的GSM协议栈怎么实现的。 那里可以下到魅族M8和宇龙酷派N90手机的原理图啊?想知道他们用的什么手机基带芯片,他们的GSM协议栈怎么实现的。… 查看全部问答> |
|
TCHAR *szver=NULL; dwlen=GetFileVersionInfoSize(szpath[k],&dwtemp); szver=new TCHAR[dwlen]; rt1=GetFileVersionInfo(szpath[k],0,dwlen +1,szver);//这里rt1==1了 DWORD cbTranslate = 0; VerQueryValue(szver, TEXT(\"\\\\VarFileInfo\ ...… 查看全部问答> |
|
我刚上大二,对IC设计和嵌入式系统开发都有一定的兴趣,我是读电子的,同时对软件也很感兴趣,所以为了避免茫然,我想定一个长远的目标,从而更好的努力。所以我想知道这两者哪个更有前景呢,说白了就是以后出来哪个薪水相对来说会更高呢。我该如何 ...… 查看全部问答> |
|
锅炉房的plc300系列有个触摸屏,现在出现个现象,有三个高压泵,2#一直运行中,1#3#备用,现在启动1#泵触摸屏会显示气压极高,导致锅炉停炉,但是起3#就没这种现象,高手们都来分析下,存在干扰?… 查看全部问答> |
|
速度性能的应用示例方案——传统的GPIB配置与经过优化的开关-源表配置 吉时利707B型开关主机和2636A型源表的优化配置时获得的速度性能的应用实例方案,有如下2个介绍: 方案1:传统的GPIB配置 此配置如图1所示。与黄色阴影部分的任务相关的时间进行了吞吐能力对比。蓝色阴影部分的执行任务的时间未进行吞吐能力对比 ...… 查看全部问答> |