



历史上的今天
今天是:2025年01月16日(星期四)

2020年01月16日 | 禾赛发布超广角补盲利器激光雷达PandarQT
2020-01-16 来源:大号评车
L2级自动驾驶正在被今天的汽车主机厂广泛提及,但是距离L3级甚至更高级别自动驾驶的商业化量产,还有很多事情要做,这其中最重要需要解决问题就是探测传感器的性能,当前被广泛采用的环境感知传感器就是激光雷达,可能我们通常都在关注远程激光雷达在车辆巡航状态时的功能和效果,但真正让车变得更加聪明,更像人类的驾驶行为是我们经常会忽略掉的短距激光雷达。
在了解短距激光雷达前,我们需要先知道激光雷达到底是什么,激光雷达(简称:LiDAR – Light Detection And Ranging)是激光主动探测传感器设备的一种统称。对于测量成像激光雷达,其主要工作原理是通过高频测距和扫描测角实现对目标轮廓三维扫描测量(成像)。现有的激光探测雷达通过多条扫描线实现对目标三维轮廓测量。相比摄像头、超声波雷达和毫米波雷达等的辅助驾驶传感器,激光雷达是真正具备空间三维分辨能力的探测传感器,更加接近人眼视觉,但真正考验一家雷达研发厂商实力的是多传感器信息的融合能力。
激光雷达根据功能分为长程和短距两种类型,我们今天要说的短距雷达主要的功能和使命就是能为车载计算机提供精度更高的 探测能力和更广的视场。以64线短距雷达为例,短距雷达64线的多个激光束在竖直方向沿不同角度发出,经水平方向扫描实现对目标区域三维轮廓探测。多个测量通道(线)相当于多个倾角的扫描平面,因此垂直视场内激光线越多其竖直方向的角分辨率就越高,激光点云密度就越大。64线激光雷达可以为车辆提供更强的机动能力。
现在我们来看一下禾赛在这次CES发布的PandarQT 64线短距机械式激光雷达,虽然每年都有声音说固态雷达将会彻底取代机械雷达,但是稳定可靠的机械式雷达仍然在当前占据市场主流,这和战斗机雷达的发展规律一样,固态有源相控阵电扫雷达完全取代机械式脉冲多普勒雷达用了相当长的时间,综合成本、稳定性和多方面原因考量,在现阶段机械式雷达在短距雷达方面仍然举办许多不可替代性。

PandarQT 64线短距机械式激光雷达最大的优势就是在测近能力方面,它的最小可探测距离为0.1 m,能对近距离的物体进行精准,这十分关键,当我们的车辆在非巡航状态时,例如路口,转弯,狭小空间精准行驶等环境下,短距激光雷达的精度起到至关重要的因素,这决定了车载计算机根据什么精度的环境感知能力进行运算,最终能够输出什么精度的驾驶指令,近距盲区问题可以被短距雷达更好地解决。我们来看一下PandarQT 64线实测点云。
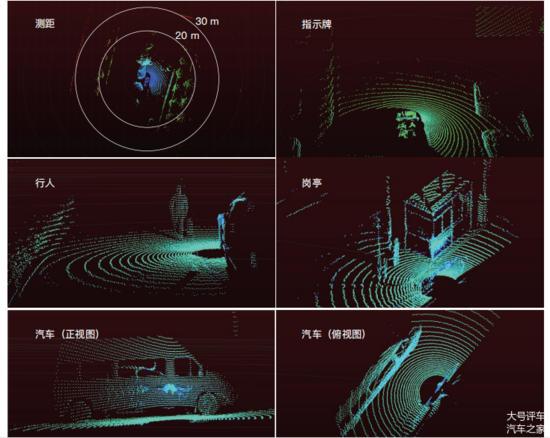
仅有高精度的环境感知能力还不够,还需要雷达拥有超广视场角,这决定了我们这辆车在同一时间内的感知范围,对车载计算机的信息量输入是否够大,PandarQT64在水平视场角保持360度的基础上,垂直视场角提升至104.2度,这样可以最大限度覆盖近距盲区,而且在大视场的基础上,仍保证了最优1.45°的垂直角分辨率和0.6°的水平角分辨率。我们可以来看一下64线的线束分布图。

PandarQT64还可以在一定程度上满足多种场景的测远能力,30 m@20%的测远能力,不仅满足自动驾驶盲区避障要求,也能满足低速物流应用场景的感知要求,对于区域驾驶环境的低速物流车来说,可能用一套雷达就可以解决所有的方案,对于物流企业来说这无疑可以降低成本。
禾赛雷达的优势在于超强的抗干扰能力,这也是可靠性的重要组成部分,PandarQT64避免了因其他雷达干扰而造成的障碍物误判,为车载计算机提供更加稳定可靠的输入数据,减少冗余计算量,提升指令速度,提升自动驾驶时候的安全性能。
PandarQT64支持PTP时间同步方式:极大地简化了线缆,这样做的好处显而易见,体积更小,重量更轻,PandarQT64的高度为76mm,直径为80.2mm,重量仅为0.4kg。减少体积和重量对于雷达来说十分重要,对于车企来说,更加灵活选择安装位,而且雷达线缆被简化后可以减少潜在的故障点,从某种意义上来说也是提升了整体元件的可靠性。
在提升可靠性方面,禾赛PandarQT不仅经过严格的精度、测距等出厂性能测试,还通过了振动、跌落、温度、湿度、老化、电气等多维度的可靠性测试,对产品的可靠性进行了多重验证。
短距激光雷达的独特优势就是高精度和大视场角,禾赛此次CES发布的这款PandarQT64在此基础上还进一步优化了产品的稳定性和可靠性,用更低的成本和更小的提及为汽车主机厂提供了一套优异的激光雷达解决方案。这无疑将更高等级自动驾驶的商业化量产之路又向前推进了一步,真正在道路上解放双手指日可待。
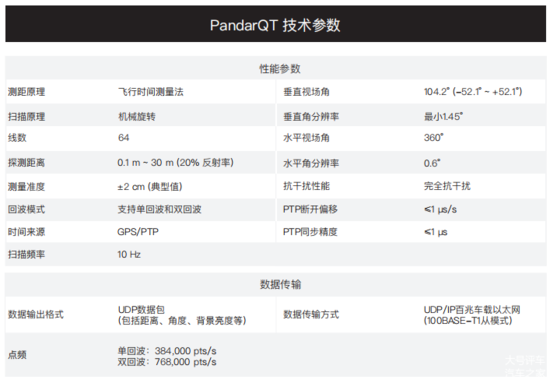
附表:PandarQT64的技术参数。
史海拾趣
|
[求助]电气规则检查出错Output Pins And Power Pins…… #1 Error Output Pins And Power Pins On Net +10V Output Pins : mc1490.SCH(U2-1 @410,570) Power Pins : mc1490.SCH(U2-2 @410,560) #2 Error Output Pins And Power Pins On Net GND Output Pins ...… 查看全部问答> |
|
出错:i2cwrite error:1460 麻烦高手指点一二 12c init iic irq mapping :[irq:27->sysIRQ:21]. OEMIoControl:Unspported Code 0x10100b4-device 0x0101 func 52 OEMIoControl:Unspported Code 0x10100b4-device 0x0101 func 62 CamCLOCKOn=1 syncist:IO_Abandoned I2CWrite error :1460 ...… 查看全部问答> |
|
我现在的6713dsp是将256kiram分为两个部分 192k用于放code和data 64k用于l2cache 但是现在速度还是上不去, 老板要求1-2毫秒完成的任务,我现在用了18毫秒 不知道主频太低是不是主要原因啊? 现在做了也有一段时间了 时间始终还是在18毫秒左 ...… 查看全部问答> |
|
下面是我的程序及硬件电路,我想通过按最左上角的键让P1.6置低电平,让蜂鸣器响起来,我的思路是先检测是否有键按下,通过对比P0口的前后电平变化来实现,然后具体扫描时哪个键,但按键怎么都不起作用,用proteus仿真时发现按下开关,那个开关处电 ...… 查看全部问答> |
|
$(\'swf_r53\').innerHTML=AC_FL_RunContent(\'width\', \'550\', \'height\', \'400\', \'allowNetworking\', \'internal\', \'allowScriptAccess\', \'never\', \'src\', encodeURI(\'http://player.youku.com/player.php/sid/XMzQ3Nzg4MjEy/v.sw ...… 查看全部问答> |
|
以前就来过eeworld,期间陆续回来离开过几次,这次又注册新号回来。发现eeworld的版面基本还是老样子,看着真不习惯。版面显示很混乱,主次不分,总给人一种杂乱无序的感觉。虽然我肯定不是技术高手,但是对于一个没有考虑到人类视觉感官的论坛,真 ...… 查看全部问答> |
|
串口问题:芯片与串口调试助手的第一次发送时,芯片发送的第一个字符收不到 最近发现一个很奇怪的问题:芯片与串口调试助手的第一次发送时,芯片发送的第一个字符收不到,第二次就全能收到了。求解 如我发送一个“hallo,world!”第一次发送就变成了“allo,world”第二次再发送就正常了。但只要一按复位键,第一次又变成 ...… 查看全部问答> |
|
为了保证高频输入和输出。(这不是说电容能跳Hokey Cokey1。) 每个集成电路(IC)都必须使用电容将各电源引脚连接到器件上的地,原因有二:防止噪声影响其本身的性能,以及防止它传输噪声而影响其它电路的性能。 电力线就像天线一样,可能会拾取其它 ...… 查看全部问答> |