



历史上的今天
今天是:2025年01月21日(星期二)

2020年01月21日 | 运用pic单片机设计直流电机无级调速系统方案
2020-01-21 来源:elecfans
现代工业生产中,电动机是主要的驱动设备,目前在直流电动机拖动系统中已大量采用晶闸管(即可控硅)装置向电动机供电的KZ—D拖动系统,取代了笨重的发电动一电动机的F—D系统,又伴随着电子技术的高度发展,促使直流电机调速逐步从模拟化向数字化转变,特别是单片机技术的应用,使直流电机调速技术又进入到一个新的阶段,智能化、高可靠性已成为它发展的趋势。本调速系统采用PIC16F874单片机作为中心处理器,充分利用了PIC16F874单片机捕捉、比较、模/数转换模块的特点作为触发电路,其优点是:结构简单,能与主电路同步,能平稳移相且有足够的移相范围,控制角调整量可达10000步,能够实现电机的无级平滑控制,脉冲前沿陡且有足够的幅值,脉宽可设定,稳定性与抗干扰性能好等。
1 直流电机调速原理
直流电动机的转速n和其它参数的关系可用下式来表示: (1)
(1)
(1)式中: Va-电枢电压,Ia-电枢电流,Ra-电枢回路总电阻,Ca-电势常数,Φ -励磁磁通。 (2)
(2)
(2)式中: p-磁极对数,N-导体数,a-电枢支路数。
CaΦ=K (3)
(3)式中:当电机型号确定后,CaΦ常数,故式式(1)改变为
在中小功率直流电机中,电枢回路电阻非常小,式(4)中IaRa项可省略不计,由此可见,直流电机的调速当改变电枢电压时,转速n随之改变。
2 系统工作原理
本系统主要由主控开关,电机激磁电路,晶闸管调速电路(包括测速电路),整流滤波电路,平波电抗器及放电电路,能耗制动电路组成,系统采用闭环PI调节器控制。当主控开关闭合后,单相交流电经晶闸管调速电路控制后,又经过桥式整流、滤波、平波电抗器后,获得脉冲小,连续的直流,提供给电机,同时,交流电通过激磁电路整流后,使电机获得励磁,开始工作。调节触发电路中的速度设定电位器RP1,使得当AN1输入电压减小时,PIC16F874单片机输出的控制角也相应减小,晶闸管导通角随之增加,主电路输出电压增大,电机速度增大,同时测速电路输出电压也增大,经PI调节器作用后,电机在设定的速度范围内稳定运转。
3 系统各部分电路设计
3.1 主电路设计
主电路中各元件参数如图1所示: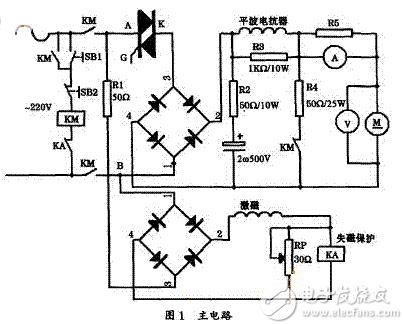
按一下启动按钮SB1,接触器KM线圈通电,KM常开触点闭合,常闭触点打开,启动按钮自锁,主电路导通。晶闸管调速电路通过改变双向晶闸管控制角大小来控制交流电输出,再经桥式整流,滤波后,得到直流,同时,电机通过激磁电路整流后,获得励磁,开始工作。
按一下停止按钮SB2,接触器KM线圈断电,KM常开触点打开,常闭触点闭合,自锁解除,主电路断电,电机停止工作。
为了限制直流电流脉动,电路中接入平波电抗器,电阻 在主电路突然断电时,为平波电抗器提供放电回路。
为了加快制动与停车,本装置中采用能耗制动,由电阻R4与主电路接触器常闭触点组成制动环节。电动机激磁由单独整流电路供电,为了防止电动机失磁而引起飞车事故,在激磁电路中,串接欠电流继电器KA。动作电流可通过电位器RP进行调整。
3.2 晶闸管触发电路设计
晶闸管触发电路及参数具体如图2所示,来自主电路中A、B两点电压经变压器变压为-20 V,再经过桥式整流后,在2点产生100 Hz左右的半波信号,通过R6,R7分压后接入NPN三极管进行放大,在三极管集电极产生过零脉冲,利用CCP1模块先捕捉过零脉冲上升沿,记下其发生时间,紧接着捕捉过零脉冲下降沿,两者的时间差即为过零脉冲宽度,其值的一半即为脉冲中点,采用这样的捕捉方式可以精确地得到交流电的实际过零点,同时利用ADC模傲转换模块转换PIC16F874引脚RA1/AN1模拟电压的值作为晶闸管控制角的设定值(电机速度设定值),改变电位器RP1设定值,相应改变晶闸管控制角大小,同时测速电路输出值由PIC16F874引脚RC0/T1CKI输入,经过TMR1计数器计数,算出转速,作为速度反馈值。本系统中单片机的振荡频率采用4 MHz,由PIC16F874单片机指令周期的特点可知,晶闸管控制角的分辨率是单片机振荡频率的四分之一的倒数,即1us,对于工频电的半波时间10 ms来说,控制角可达10000步,完全能够实现电机的无级平滑控制。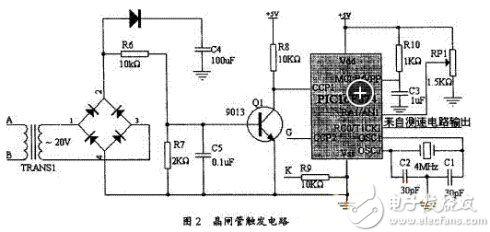
3.3 测速电路设计
测速电路由附着在电机转子上的光码盘及电脉冲放大整形电路组成。电脉冲的频率与电机的转速成固定的比例关系,光码盘输出的电脉冲信号经放大整形为标堆TTL电平从PIC16F874单片机引脚RC0/T1CKI输入,通过TMR1计数器进行计数,从而算出转速,将这个转速与预置转速进行比较,得出差值,PIC16F874通过对这个差值进行PI运算,得出控制增量,在CCP2送出晶闸管控制角的大小,从而改变加在电机两端的有效电压,最终达到控制转速的目的。
4 系统软件设计
将速度闭环控制设计成为典型I系统,即PI调节器,用来调节晶闸管控制角时间Td,其控制算法为:
其中a1=Kp,Kp-控制器的比例系数,T1-积分时间常数,Ti-采样周期。
本系统的软件设计模块主要包括CCP1上升沿捕捉模块,CCP1下升沿捕捉模块,控制角设定值A/D转换模块,测速电路脉冲定时计数模块,PI调节器模块,CCP2比较输出模块等,各模块程序流程图的关系如图3所示。
图3 CCP1,CCP2模块中断程序流程图
假设我们得到过零点时间为Tσ,晶闸管控制角时间为Td,那么送入CCP2寄存器CCPR2H:L比较值Tf=Tσ+Td,比较一致后,将在CCP2引脚上输出高电平,使晶闸管导通,然后根据所需的触发脉宽值,再次修改CCPR2H:L值,使输出高电平触发脉冲维持一定的时间后再回到低电平,这样就完成一个双向晶闸管触发脉冲输出。
总结:本系统软件、硬件设计充分利用了PIC16F874单片机捕捉、比较、模/数转换模块的特点,以及单片机振荡频率高,响应快等优点,设计出相应的触发电路,使得PIC16F874单片机的模/数转换模块能迅速、准确的转换速度设定值;CCP1模块能精确捕捉交流电的过零点;测速电路的定时计数模块能准确地计数,算出反馈转速;CCP2模块能及时地比较Tf值输出触发脉冲,在中小型直流电机调速系统应用中,具有结构简单,运行可靠,调节范围宽,电流连续性好,响应快等特点。
史海拾趣
|
新手提问,请勿取笑,呵呵。 S3C2410在管脚复用的时候有这样一段代码: //set GPG1 as EINT9 for CS8900A value = INREG32(&pOalPortRegs->GPGCON); OUTREG32(&pOalPortRegs->GPGCON,(value & ~(3… 查看全部问答> |
|
产品最初正常工作,内核和应用程序都好的。过了一段时间后启动异常。 步骤是开机Bootloader启动,启动时加载了LOGO界面填充了液晶的显示缓冲区,后来就停在这里了。 我可以按照原来的方式烧内核,更换了画面也可以显示。 重烧了BOOTLOADER后也没 ...… 查看全部问答> |
|
在应用程序里如何查询某个USB连在哪一个USB controller上 在具有多个USB controller和多个USB设备的情况下, 如何查询这些USB设备连接在哪个USB controller上。 设备管理器中,如果选择“依连接排序设备”,就可以看到所 有设备的Device Tree,VC里有什么API或者什么方法可以获得 类似的信息吗? 请高 ...… 查看全部问答> |
|
看看有没有问题,第一次玩STM32,没有什么经验,硬件是按照st-link制作的,做了一些修改(st-link本来也是一块开发板)。准备自己做JTAG下载工具或者调试工具,呵呵,如果搞的定的话。PCB还没铺地,其他都OK了。发现一个错误,应该BOOT1接地,BO ...… 查看全部问答> |
|
μC/OS-II实时性能测试指标 衡量嵌入式实时操作系统的好坏一般主要参考以下主要性能指标参数: 任务切换时间、中断响应时间、任务响应时间、任务创建/删除时间、交替信号量时间、取得/释放信号量时间、交替消息队列传输时间等。本文仅对前2个 ...… 查看全部问答> |