



历史上的今天
今天是:2025年02月19日(星期三)
2021年02月19日 | 锐颖科技的人脸识别,准确感知真实影像
2021-02-19 来源:爱集微
近日,锐颖科技的“燎原”系列人脸识别终端隆重出场,其双通道ISP设计支持双摄像头传感器,使人脸识别终端支持仿生双目活体检测,能够感知真实影像,拒绝照片视频欺骗。
随着人脸识别技术的发展,人脸识别被广泛应用于门禁、考勤、支付、金融等领域,也因此面临各种威胁,比如攻击者使用存有目标人脸图片的手机,或打印有对应人脸的纸张进行识别。现有多种活体判断方法来防备这种攻击,但这些方法难度大,计算量大,对深度信息精度要求高,并且容易受到光线,环境等因素的影响,存在一定概率的漏判和误判。
为此,锐颖科技于2020年10月15日申请了一项名为“基于双目深度信息的活体检测方法、设备及存储介质”的发明专利(申请号: 202011105534.2),申请人为杭州锐颖科技有限公司。
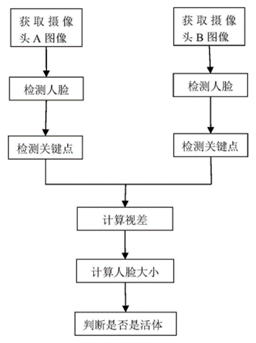
图1 基于双目深度信息的活体检测方法流程图
图1为本发明提出的基于双目深度信息的活体检测方法流程图。首先通过两个摄像头拍摄同一目标物的图像,得到第一目标图像和第二目标图像。然后获取目标物的关键点在第一目标图像和第二目标图像中的坐标,并根据坐标计算两个摄像头之间的视差,再根据视差计算得出图像中目标物的像素宽度。最后判断计算出的图像中目标物的像素宽度是否小于阈值,若小于阈值,则目标物为活体,否则为非活体。
其中目标物指人脸,实际人脸在图像中像素宽度的平均值通过以下步骤获得:首先获取多个不同人脸图像,分别计算每个图像中人脸的像素宽度,最后将多个图像中人脸的像素宽度求平均值。阈值的设定以实际人脸在图像中像素宽度的平均值为参考值,以此平均值为基准上下浮动一定范围,使阈值更接近人脸的实际大小。
双目设备获取深度信息的原理是通过同一目标在两个摄像头(摄像头A和摄像头B)中存在视差,距离越近视差越大,距离越远视差越小。一般人脸识别中的非活体攻击是使用手机中或纸张打印的人脸图片,与实际的人脸大小相差较大。为了防御这种非活体攻击,对两个摄像头成像的人脸图像检测关键点,然后根据关键点的坐标计算人脸在两个摄像头之间的视差,计算得到实际人脸大小后,和现实中的平均人脸大小作比较,如果两者相差小于设定的阈值,那么就认为是活体,大于阈值则认为非活体。
简而言之,锐颖科技的人脸识别专利,与传统的活体检测方法相比,逻辑简单计算量少,完全满足实时性的要求,不需要目标主动配合。并且对于特定的非活体攻击有很好的防御效果,准确率高,没有误判,提高了整体的活体判断准确率。
锐颖科技是以人工智能领域尖端技术为核心,专业从事智能化硬件设备研发、生产与销售的高科技企业。公司秉承“让硬件更智能,让生活更便捷”的理念,致力于智能视觉处理技术研究及相关产品的研发生产,志在成为全球卓越的智能硬件解决方案提供商。
史海拾趣
|
单片机的中断技术,在一定程度上解决了高速单片机内核与 低速外部设备之间的矛盾,从而大大提高了单片机的效率,但它 对高速外部设备要求快速传送数据则显得无能为力。C805 1 FO6X 系列单片机的最大亮点是其高速高精度数模转换器接口,对于 1 M ...… 查看全部问答> |
|
请问CPLD的JTAG口和CPLD距离有12CM远。。这样会不会有问题啊??? 来自EEWORLD合作群:arm linux fpga 嵌入0群 49900581(超级群) 群主在坛子里ID:wangkj 请问CPLD的JTAG口和CPLD距离有12CM远。。这样会不会有问题啊??? 会不会下载不了啊?… 查看全部问答> |
|
图附件电路:IC为控制电路,Q端输出控制信号3V左右,控制三极管的导通。工作电压5--24V, K为24V继电器。 主要意图:24V电源供电,当Q没有输出时,继电器不工作,但有漏电流。当Q端有输出时,三极管导通,继电器工作。电路目前问题是:三极管导通 ...… 查看全部问答> |
|
我的永磁电机驱动电路中采用了6颗IGBT,目前用的英飞凌IKD03N60RF(就是他们今年推出的RC-D Fast系列),一个是2.5A器件,最高可支持100W的逆变器输出功率,性能确实非常好(功耗优点最明显,不用散热器,另外尺寸减小不少,不过我的PCB尺寸不是问 ...… 查看全部问答> |
|
活动就在本版的置顶位置 https://bbs.eeworld.com.cn/thread-414389-1-1.html 一些大家发出来的bug我将陆续汇总在此: 【“解BUG”活动】最近在玩LED灯,看到430板子上有三色灯,请教恒压PWM调流https://bbs.eeworld.com.cn/thread-415689-1-1.h ...… 查看全部问答> |