



历史上的今天
今天是:2024年10月12日(星期六)
2021年10月12日 | S3C2440裸机------异常与中断__und异常模示程序示例
2021-10-12 来源:eefocus
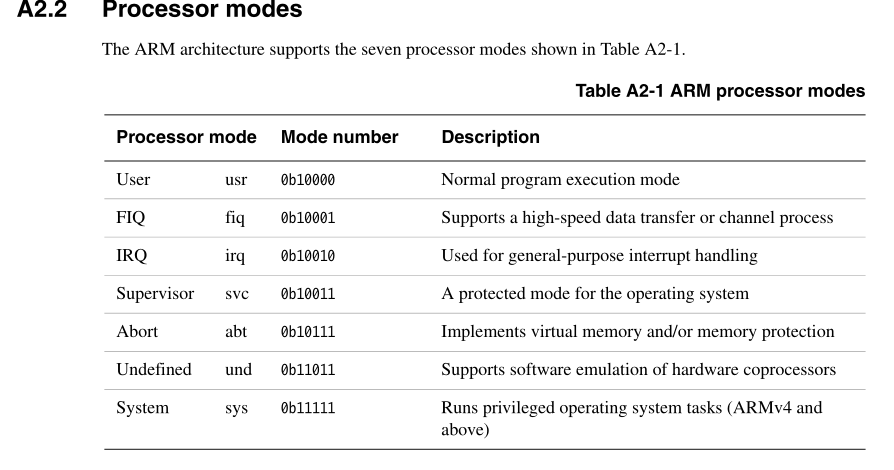
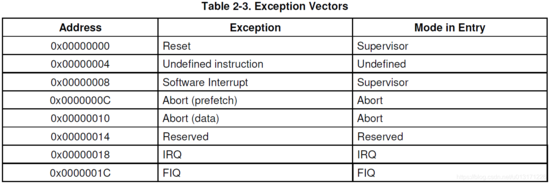
1.异常向量表
我们先看一下芯片手册里面的异常向量表,
2.代码流程
我们在重定位的第10个程序的基础上进行修改。
我们要在start.S的前面增加跳转到相应异常向量表的代码,并且要增加代码,当发生未定义指令异常时候跳转到该代码块进行保存现场、处理未定义异常以及恢复现场的工作,然后在下面故意写一条不能被识别的指令。
2.1增加异常向量表代码
首先在start.S的前面增加相应的跳转指令,当发生异常时会根据这里的跳转指令跳转到相应的地方,代码如下。
_start:
b reset /* vector 0 : reset */
b do_und /* vector 4 : und */
2.2设置栈
进入异常模式之后,使用的异常模式下的栈,所以我们要在处理异常之前设置一下异常模式的栈,我们随便找一块没有用到的内存就可以了,这里我们让他指向64MSDRAM的最高地址0x34000000。
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
2.3 保存现场
由于r0-r12都有可能被修改,因为我们要把r0-r12都保存一下,另外当发生异常时,当前被中断的地址回报存在LR寄存器里面,所以我们也要把LR寄存器保存一下,这里stmdb只是stm decrease before,也就是先减后存。
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
2.4 处理异常
这里处理未定义异常的的工作我们通过编写一个C函数实现,我们新建一个exception.c,在里面编写我们的处理函数,exception.c内容如下:
#include "uart.h"
void printException(unsigned int cpsr, char *str)
{
puts("Exception! cpsr = ");
printHex(cpsr);
puts(" ");
puts(str);
puts("nr");
}
这个函数由两个参数,所以我们在start.S中调用这个函数时要传给他两个参数,在汇编代码中定义字符串可以使用.ascii和.string,他们两个的区别在于,用.ascii定义的字符串变量不会再末尾自动加上结束符�.
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
2.5 恢复现场
把r0-r12的值从栈中读出来,并且并原来保存在LR寄存器中的值赋值给PC,ldmia是指ldm increase after,也就是 先读后加。
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
2.6 故意加入一条未定义指令
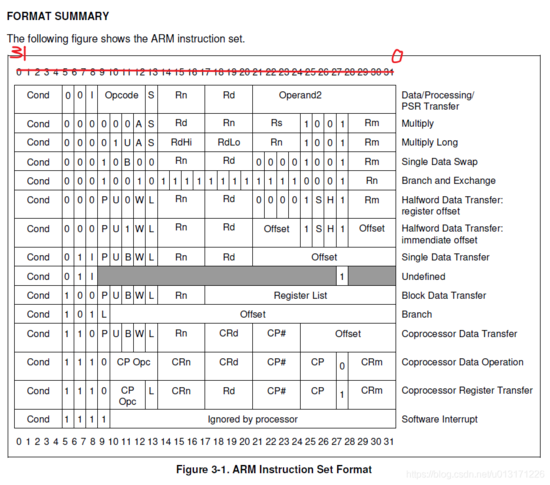
我们看一下2440的芯片手册,找到ARM指令集,只要是下表中的指令都是合法的指令。我们需要定义一条下表中不支持的非法指令,或者直接用0xdeadc0de表示一条未定义指令。
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
3.代码
3.1start.S
下面我们看一下修改后的完整的start.S。
.text
.global _start
_start:
b reset /* vector 0 : reset */
b do_und /* vector 4 : und */
do_und:
/* 执行到这里之前:
* 1. lr保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
3.2 exception.c
#include "uart.h"
void printException(unsigned int cpsr, char *str)
{
puts("Exception! cpsr = ");
printHex(cpsr);
puts(" ");
puts(str);
puts("nr");
}
4.优化
我们把前面异常向量表的跳转指令改为绝对跳转,这样保证如果是nandflash,并且代码大于4K,那么我们后面的bl printException也不会出错,
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
这样修改之后还有一个问题,我们看一下反汇编,

它去300000c0这个地方去取值,
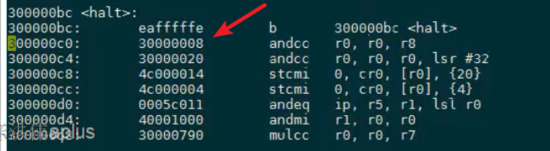
然后c0这个地方存在的30000008,30000008就是下面这条指令的地址。

其实就是do_und指令的地址保存到内存中,然后ldr pc, und_addr会去内存中找到这个值,然后付给pc, 那么他去内存的那个地方找这个值呢,一般由编译器决定,通常会放在汇编文件的最后面,我们这个start.S非常小,如果这个start.S非常大,那么他有可能会去4K之外的地方取值,所以我们能不能指定让他去前面的内存去读这个值呢,因为我们担心这个汇编文件很大的话,有可能超过4K,如果你的板子是nand启动,那么在4K之外就没有办法读到值。修改如下:
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
und_addr:
.word do_und
同样下面的代码在重定位之后,我们就应该跳转到SDRAM去执行代码,所以增加ldr pc, =sdram
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
修改后的start.S如下:
.text
.global _start
_start:
b reset /* vector 0 : reset */
ldr pc, und_addr /* vector 4 : und */
und_addr:
.word do_und
do_und:
/* 执行到这里之前:
* 1. lr_und保存有被中断模式中的下一条即将执行的指令的地址
* 2. SPSR_und保存有被中断模式的CPSR
* 3. CPSR中的M4-M0被设置为11011, 进入到und模式
* 4. 跳到0x4的地方执行程序
*/
/* sp_und未设置, 先设置它 */
ldr sp, =0x34000000
/* 在und异常处理函数中有可能会修改r0-r12, 所以先保存 */
/* lr是异常处理完后的返回地址, 也要保存 */
stmdb sp!, {r0-r12, lr}
/* 保存现场 */
/* 处理und异常 */
mrs r0, cpsr
ldr r1, =und_string
bl printException
/* 恢复现场 */
ldmia sp!, {r0-r12, pc}^ /* ^会把spsr的值恢复到cpsr里 */
und_string:
.string "undefined instruction exception"
.align 4
reset:
/* 关闭看门狗 */
ldr r0, =0x53000000
ldr r1, =0
str r1, [r0]
/* 设置MPLL, FCLK : HCLK : PCLK = 400m : 100m : 50m */
/* LOCKTIME(0x4C000000) = 0xFFFFFFFF */
ldr r0, =0x4C000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/* CLKDIVN(0x4C000014) = 0X5, tFCLK:tHCLK:tPCLK = 1:4:8 */
ldr r0, =0x4C000014
ldr r1, =0x5
str r1, [r0]
/* 设置CPU工作于异步模式 */
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/* 设置MPLLCON(0x4C000004) = (92<<12)|(1<<4)|(1<<0)
* m = MDIV+8 = 92+8=100
* p = PDIV+2 = 1+2 = 3
* s = SDIV = 1
* FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400M
*/
ldr r0, =0x4C000004
ldr r1, =(92<<12)|(1<<4)|(1<<0)
str r1, [r0]
/* 一旦设置PLL, 就会锁定lock time直到PLL输出稳定
* 然后CPU工作于新的频率FCLK
*/
/* 设置内存: sp 栈 */
/* 分辨是nor/nand启动
* 写0到0地址, 再读出来
* 如果得到0, 表示0地址上的内容被修改了, 它对应ram, 这就是nand启动
* 否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /* 读出原来的值备份 */
str r1, [r1] /* 0->[0] */
ldr r2, [r1] /* r2=[0] */
cmp r1, r2 /* r1==r2? 如果相等表示是NAND启动 */
ldr sp, =0x40000000+4096 /* 先假设是nor启动 */
moveq sp, #4096 /* nand启动 */
streq r0, [r1] /* 恢复原来的值 */
bl sdram_init
//bl sdram_init2 /* 用到有初始值的数组, 不是位置无关码 */
/* 重定位text, rodata, data段整个程序 */
bl copy2sdram
/* 清除BSS段 */
bl clean_bss
ldr pc, =sdram
sdram:
bl uart0_init
bl print1
/* 故意加入一条未定义指令 */
und_code:
.word 0xdeadc0de /* 未定义指令 */
bl print2
//bl main /* 使用BL命令相对跳转, 程序仍然在NOR/sram执行 */
ldr pc, =main /* 绝对跳转, 跳到SDRAM */
halt:
b halt
修改后的程序整体执行过程如下:

史海拾趣
|
如同高速网络交换和采用多处理器结构的超级计算机一样,在多FPGA的设计中千兆位收发器的采用是必然的。带有RocketIO收发器的FPGA会成为连接处理器矩阵和FPGA的唯一互连选择,以确保整个板上处理器矩阵间的数据吞吐能力。 当实现高速串行连接时 ...… 查看全部问答> |
|
为什么将GPIO配置成中断模式后,GPGDAT就不能读了?? 将GPIO如GPG端口中的GPG1配置成中断模式(GPGCON中配的),这样的话GPGDAT就不能读了吧(至少2440的datasheet上是这么说的)? 但是我看别人写的驱动怎么将GPG配成了中断模式,却用读取GPGDAT的相应位来判断是否产 ...… 查看全部问答> |
|
Windows Mobile 5.0,Windows Mobile 60设备,如何在我的程序运行过程中禁用上面的Power电源按钮 Windows Mobile 5.0,Windows Mobile 60设备,如何在我的程序运行过程中禁用上面的Power电源按钮… 查看全部问答> |
|
源码请教,关于Tab Ctrl 的多对话框共享从串口采集的数据,怎么实现啊? 现在有个项目,28号就要,很急,没实现Tab Ctrl 的多对话框共享从串口采集的数据,有四个对话框,每个对话框分别有很多的控件,要显示从串口采集来的数据,怎么样才能实现共享啊,请大家帮帮忙!!! 其中Tab Ctrl 的多对话框主要使用下面的方案5实 ...… 查看全部问答> |