



历史上的今天
今天是:2024年10月29日(星期二)

2021年10月29日 | 51单片机实现在在定时中断里动态扫描数码管的程序
2021-10-29 来源:eefocus
一、使用proteus绘制简单的电路图,用于后续仿真
二、编写程序
/********************************************************************************************************************
---- @Project: LED-74HC595
---- @File: main.c
---- @Edit: ZHQ
---- @Version: V1.0
---- @CreationTime: 20200605
---- @ModifiedTime: 20200605
---- @Description: 用两片74HC595动态驱动八位共阴数码管。
---- 开机后显示 8765.4321 的内容,注意,其中有一个小数点。
---- 单片机:AT89C52
********************************************************************************************************************/
#include "reg52.h"
/*——————宏定义——————*/
#define FOSC 11059200L
#define T1MS (65536-FOSC/12/500) /*0.5ms timer calculation method in 12Tmode*/
#define const_voice_short 40 /*蜂鸣器短叫的持续时间*/
#define const_key_time1 20 /*按键去抖动延时的时间*/
#define const_sensor 20 /*开关感应器去抖动延时的时间*/
#define const_1s 500 /*开关感应器去抖动延时的时间*/
/*——————变量函数定义及声明——————*/
/*定义数码管的74HC595*/
sbit Dig_Hc595_Sh = P2^0;
sbit Dig_Hc595_St = P2^1;
sbit Dig_Hc595_Ds = P2^2;
/*定义蜂鸣器*/
sbit Beep = P2^7;
/*作为中途暂停指示灯 亮的时候表示中途暂停*/
sbit LED = P3^5;
unsigned char ucDigShow8; /*第8位数码管要显示的内容*/
unsigned char ucDigShow7; /*第7位数码管要显示的内容*/
unsigned char ucDigShow6; /*第6位数码管要显示的内容*/
unsigned char ucDigShow5; /*第5位数码管要显示的内容*/
unsigned char ucDigShow4; /*第4位数码管要显示的内容*/
unsigned char ucDigShow3; /*第3位数码管要显示的内容*/
unsigned char ucDigShow2; /*第2位数码管要显示的内容*/
unsigned char ucDigShow1; /*第1位数码管要显示的内容*/
unsigned char ucDigDot8; /*数码管8的小数点是否显示的标志*/
unsigned char ucDigDot7; /*数码管7的小数点是否显示的标志*/
unsigned char ucDigDot6; /*数码管6的小数点是否显示的标志*/
unsigned char ucDigDot5; /*数码管5的小数点是否显示的标志*/
unsigned char ucDigDot4; /*数码管4的小数点是否显示的标志*/
unsigned char ucDigDot3; /*数码管3的小数点是否显示的标志*/
unsigned char ucDigDot2; /*数码管2的小数点是否显示的标志*/
unsigned char ucDigDot1; /*数码管1的小数点是否显示的标志*/
unsigned char ucDigShowTemp = 0; /*临时中间变量*/
unsigned char ucDisplayDriveStep = 1; /*动态扫描数码管的步骤变量*/
unsigned char ucDisplayUpdate = 1; /*更新显示标志*/
unsigned int uiVoiceCnt = 0; /*蜂鸣器鸣叫的持续时间计数器*/
void Dig_Hc595_Drive(unsigned char, unsigned char);
/*根据原理图得出的共阴数码管字模表*/
code unsigned char Dig_Table[] =
{
0x3f, /*0 序号0*/
0x06, /*1 序号1*/
0x5b, /*2 序号2*/
0x4f, /*3 序号3*/
0x66, /*4 序号4*/
0x6d, /*5 序号5*/
0x7d, /*6 序号6*/
0x07, /*7 序号7*/
0x7f, /*8 序号8*/
0x6f, /*9 序号9*/
0x00, /*不显示 序号10*/
};
/**
* @brief 定时器0初始化函数
* @param 无
* @retval 初始化T0
**/
void Init_T0(void)
{
TMOD = 0x01; /*set timer0 as mode1 (16-bit)*/
TL0 = T1MS; /*initial timer0 low byte*/
TH0 = T1MS >> 8; /*initial timer0 high byte*/
}
/**
* @brief 外围初始化函数
* @param 无
* @retval 初始化外围
* 让数码管显示的内容转移到以下几个变量接口上,方便以后编写更上一层的窗口程序。
* 只要更改以下对应变量的内容,就可以显示你想显示的数字。
**/
void Init_Peripheral(void)
{
ucDigShow8 = 8; /*第8位数码管要显示的内容*/
ucDigShow7 = 7; /*第7位数码管要显示的内容*/
ucDigShow6 = 6; /*第6位数码管要显示的内容*/
ucDigShow5 = 5; /*第5位数码管要显示的内容*/
ucDigShow4 = 4; /*第4位数码管要显示的内容*/
ucDigShow3 = 3; /*第3位数码管要显示的内容*/
ucDigShow2 = 2; /*第2位数码管要显示的内容*/
ucDigShow1 = 1; /*第1位数码管要显示的内容*/
ucDigDot8 = 0;
ucDigDot7 = 0;
ucDigDot6 = 0;
ucDigDot5 = 1; /*数码管5的小数点显示*/
ucDigDot4 = 0;
ucDigDot3 = 0;
ucDigDot2 = 0;
ucDigDot1 = 0;
ET0 = 1;/*允许定时中断*/
TR0 = 1;/*启动定时中断*/
EA = 1;/*开总中断*/
}
/**
* @brief 初始化函数
* @param 无
* @retval 初始化单片机
**/
void Init(void)
{
LED = 0;
Beep = 1;
Dig_Hc595_Drive(0x00, 0x00); /*关闭所有经过另外两个74HC595驱动的LED灯*/
Init_T0();
}
/**
* @brief 延时函数
* @param 无
* @retval 无
**/
void Delay_Long(unsigned int uiDelayLong)
{
unsigned int i;
unsigned int j;
for(i=0;i for(j=0;j<500;j++) /*内嵌循环的空指令数量*/ { ; /*一个分号相当于执行一条空语句*/ } } } /** * @brief 延时函数 * @param 无 * @retval 无 **/ void Delay_Short(unsigned int uiDelayShort) { unsigned int i; for(i=0;i ; /*一个分号相当于执行一条空语句*/ } } /** * @brief 显示数码管字模的驱动函数 * @param 无 * @retval 动态驱动数码管的原理 * 在八位数码管中,在任何一个瞬间,每次只显示其中一位数码管,另外的七个数码管 * 通过设置其公共位com为高电平来关闭显示,只要切换画面的速度足够快,人的视觉就分辨不出来,感觉八个数码管 * 是同时亮的。以下dig_hc595_drive(xx,yy)函数,其中第一个形参xx是驱动数码管段seg的引脚,第二个形参yy是驱动 * 数码管公共位com的引脚。 **/ void Display_Drive(void) { switch(ucDisplayDriveStep) { case 1: /*显示第1位*/ ucDigShowTemp = Dig_Table[ucDigShow1]; if(ucDigDot1 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xfe); break; case 2: /*显示第2位*/ ucDigShowTemp = Dig_Table[ucDigShow2]; if(ucDigDot2 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xfd); break; case 3: /*显示第3位*/ ucDigShowTemp = Dig_Table[ucDigShow3]; if(ucDigDot3 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xfb); break; case 4: /*显示第4位*/ ucDigShowTemp = Dig_Table[ucDigShow4]; if(ucDigDot4 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xf7); break; case 5: /*显示第5位*/ ucDigShowTemp = Dig_Table[ucDigShow5]; if(ucDigDot5 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xef); break; case 6: /*显示第6位*/ ucDigShowTemp = Dig_Table[ucDigShow6]; if(ucDigDot6 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xdf); break; case 7: /*显示第7位*/ ucDigShowTemp = Dig_Table[ucDigShow7]; if(ucDigDot7 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0xbf); break; case 8: /*显示第8位*/ ucDigShowTemp = Dig_Table[ucDigShow8]; if(ucDigDot8 == 1) { ucDigShowTemp = ucDigShowTemp | 0x80; /*显示小数点*/ } Dig_Hc595_Drive(ucDigShowTemp, 0x7f); break; } ucDisplayDriveStep ++; /*逐位显示*/ if(ucDisplayDriveStep > 8) /*扫描完8个数码管后,重新从第一个开始扫描*/ { ucDisplayDriveStep = 1; } } /** * @brief 数码管的595驱动函数 * @param 无 * @retval * 如果直接是单片机的IO口引脚驱动的数码管,由于驱动的速度太快,此处应该适当增加一点delay延时或者 * 用计数延时的方式来延时,目的是在八位数码管中切换到每位数码管显示的时候,都能停留一会再切换到其它 * 位的数码管界面,这样可以增加显示的效果。但是,由于是间接经过74HC595驱动数码管的, * 在单片机驱动74HC595的时候,dig_hc595_drive函数本身内部需要执行很多指令,已经相当于delay延时了, * 因此这里不再需要加delay延时函数或者计数延时。 **/ void Dig_HC595_Drive(unsigned char ucDigStatusTemp16_09, unsigned char ucDigStatusTemp08_01) { unsigned char i; unsigned char ucTempData; Dig_Hc595_Sh = 0; Dig_Hc595_St = 0; ucTempData = ucDigStatusTemp16_09; /*先送高8位*/ for(i = 0; i < 8; i ++) { if(ucTempData >= 0x80) { Dig_Hc595_Ds = 1; } else { Dig_Hc595_Ds = 0; } /*注意,此处的延时delay_short必须尽可能小,否则动态扫描数码管的速度就不够。*/ Dig_Hc595_Sh = 0; /*SH引脚的上升沿把数据送入寄存器*/ Delay_Short(1); Dig_Hc595_Sh = 1; Delay_Short(1); ucTempData = ucTempData <<1; } ucTempData = ucDigStatusTemp08_01; /*再先送低8位*/ for(i = 0; i < 8; i ++) { if(ucTempData >= 0x80) { Dig_Hc595_Ds = 1; } else { Dig_Hc595_Ds = 0; } Dig_Hc595_Sh = 0; /*SH引脚的上升沿把数据送入寄存器*/ Delay_Short(1); Dig_Hc595_Sh = 1; Delay_Short(1); ucTempData = ucTempData <<1; } Dig_Hc595_St = 0; /*ST引脚把两个寄存器的数据更新输出到74HC595的输出引脚上并且锁存起来*/ Delay_Short(1); Dig_Hc595_St = 1; Delay_Short(1); Dig_Hc595_Sh = 0; /*拉低,抗干扰就增强*/ Dig_Hc595_St = 0; Dig_Hc595_Ds = 0; } /** * @brief 定时器0中断函数 * @param 无 * @retval 无 **/ void ISR_T0(void) interrupt 1 { TF0 = 0; /*清除中断标志*/ TR0 = 0; /*关中断*/ /*显示数码管字模的驱动函数*/ Display_Drive(); TL0 = T1MS; /*initial timer0 low byte*/ TH0 = T1MS >> 8; /*initial timer0 high byte*/ TR0 = 1; /*开中断*/ } /*——————主函数——————*/ /** * @brief 主函数 * @param 无 * @retval 实现LED灯闪烁 **/ void main() { /*单片机初始化*/ Init(); /*延时,延时时间一般是0.3秒到2秒之间,等待外围芯片和模块上电稳定*/ Delay_Long(100); /*单片机外围初始化*/ Init_Peripheral(); while(1) { ; } } 三、仿真实现 51单片机实现在在定时中断里动态扫描数码管的程序 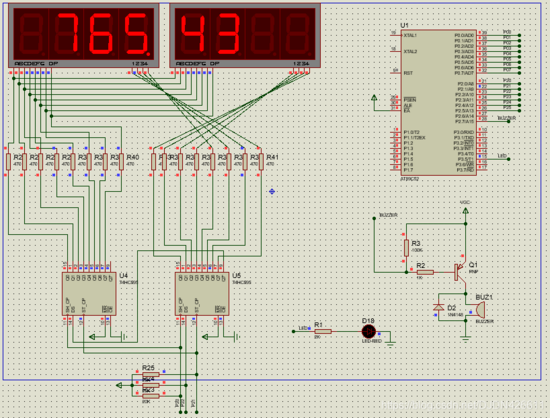
史海拾趣
|
来源:窗户纸 http://www.getproject.com.cn/post/98.html 机器人,听起来挺神秘的,在大多数科幻电影和文学作品中,机器人通常无所不知,无所不能,跟人类相比起来,简直就是完美无瑕了。因此,作品中的机器人,要么是人类的好朋友, ...… 查看全部问答> |
|
本帖最后由 paulhyde 于 2014-9-15 09:23 编辑 我产生的调制信号频率150K,在不混频的情况下可以直接通过功率放大器进行电感耦合吗???两个电感线圈的距离为5CM 具体功率放大器怎样设计??? … 查看全部问答> |
|
virtual BOOL ExtTextOut ( int x, int y, UINT nOptions, LPCRECT lpRect, LPCTSTR lpszString, UINT nCount, LPINT lpDxWidths ); 想请教一下参数nOptions是否有效?本人通过测试,觉得ETO-CLIPPED、ETO-OPAQUE、NULL三者之间没有 ...… 查看全部问答> |
|
VC++关于directshow图像旋转90度输出花屏的问题 VC++关于directshow图像旋转90度输出花屏的问题 我在transfilter对图像做了一个90度的旋转,再传给第三个filter,发现图像是花屏,解析度为176x144 如果解析度为高,宽相等就是正常的(如:240x240) 请问是什么原因?… 查看全部问答> |
|
我问ST工程师的邮件:~~: 你好! 我需要用到BEEP功能,可是设定寄存器后跑程序,发现BEEP寄存器并没有改变.OPTION里面我有把PD4设成BEEP功能,OPTION里的PRSC设成(16MHZ TO 128KHZ P ...… 查看全部问答> |
|
我在用LPC11C14写IAP在线升级程序时,将用户程序的向量表复制到RAM的0地址,再通过重映射寄存器重映射到FLASH的0地址,实现了用户程序调用中断,但现在要把CAN API的程序加上去,而CAN API要占用RAM的0x1000 0050-0x1000 00B8 ...… 查看全部问答> |
|
现在刚开始接触FPGA不久,看了很长时间论坛了,也学习了Verilog,试着学习应用quartusii和modelsim,现在依旧感觉没有多大进步,好像根本还没有入门,简单的仿真还能进行,遇到复杂点的,比如几个模块联合编译仿真就总是仿真失败,也没有找到原因! ...… 查看全部问答> |