



历史上的今天
今天是:2024年11月01日(星期五)
2021年11月01日 | stm32专题三十四:独立看门狗 IWDG
2021-11-01 来源:eefocus
独立看门狗简介

IWDG结构框图

(1)独立看门狗时钟
独立看门狗的时钟由独立的 RC 振荡器 LSI 提供, 即使主时钟发生故障它仍然有效,非常独立。 LSI 的频率一般在 30~60KHZ 之间,根据温度和工作场合会有一定的漂移,我们一般取 40KHZ,所以独立看门狗的定时时间并一定非常精确,只适用于对时间精度要求比较低的场合。
(2)计数器时钟
实际的计数频率为:


(3)计数器

(4)重装载寄存器
重装载寄存器是一个 12 位的寄存器,里面装着要刷新到计数器的值,这个值的大小决定着独立看门狗的溢出时间。
(5)键寄存器

寄存器说明:

(6)状态寄存器:

如何使用IWDG

RCC复位描述
STM32F10xxx支持三种复位形式,分别为系统复位、上电复位和备份区域复位。
1 系统复位

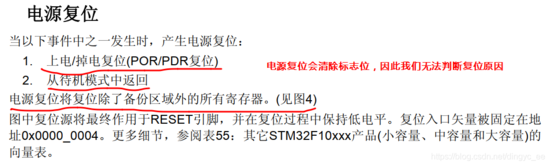
2 电源复位
3 备份域复位

*************************************************************************************************************************
如果独立看门狗 IWDG 产生复位,我们可以从RCC复位和时钟控制寄存器中获取复位原因:
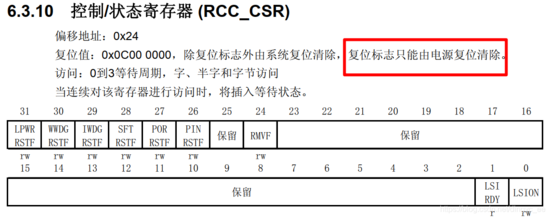
以下是各种复位标志位:

代码分析
标准库中,关于 IWDG 总共就只有以下几个函数,都是配置或读取寄存器,非常简单,就不看源码了:
/** @defgroup IWDG_Exported_Functions
* @{
*/
void IWDG_WriteAccessCmd(uint16_t IWDG_WriteAccess);
void IWDG_SetPrescaler(uint8_t IWDG_Prescaler);
void IWDG_SetReload(uint16_t Reload);
void IWDG_ReloadCounter(void);
void IWDG_Enable(void);
FlagStatus IWDG_GetFlagStatus(uint16_t IWDG_FLAG);
常用的独立看门狗配置 和喂狗操作:
/*
* 设置 IWDG 的超时时间
* Tout = prv/40 * rlv (s)
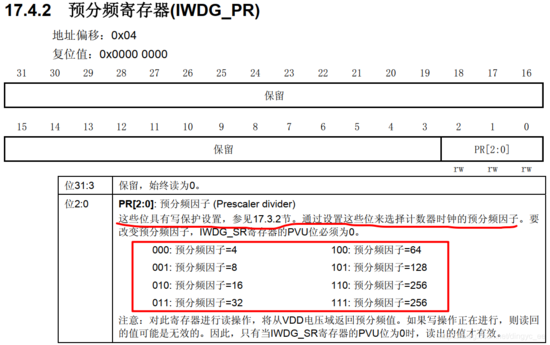
* prv可以是[4,8,16,32,64,128,256]
* prv:预分频器值,取值如下:
* @arg IWDG_Prescaler_4: IWDG prescaler set to 4
* @arg IWDG_Prescaler_8: IWDG prescaler set to 8
* @arg IWDG_Prescaler_16: IWDG prescaler set to 16
* @arg IWDG_Prescaler_32: IWDG prescaler set to 32
* @arg IWDG_Prescaler_64: IWDG prescaler set to 64
* @arg IWDG_Prescaler_128: IWDG prescaler set to 128
* @arg IWDG_Prescaler_256: IWDG prescaler set to 256
*
* rlv:预分频器值,取值范围为:0-0XFFF
* 函数调用举例:
* IWDG_Config(IWDG_Prescaler_64 ,625); // IWDG 1s 超时溢出
*/
void IWDG_Config(uint8_t prv ,uint16_t rlv)
{
// 使能 预分频寄存器PR和重装载寄存器RLR可写
IWDG_WriteAccessCmd( IWDG_WriteAccess_Enable );
// 设置预分频器值
IWDG_SetPrescaler( prv );
// 设置重装载寄存器值
IWDG_SetReload( rlv );
// 把重装载寄存器的值放到计数器中
IWDG_ReloadCounter();
// 使能 IWDG
IWDG_Enable();
}
// 喂狗
void IWDG_Feed(void)
{
// 把重装载寄存器的值放到计数器中,喂狗,防止IWDG复位
// 当计数器的值减到0的时候会产生系统复位
IWDG_ReloadCounter();
}
然后在主函数中进行测试,如果 看门狗复位,那么就能够检测到相应的复位标志。
main.c
int main(void)
{
// 配置LED GPIO,并关闭LED
LED_GPIO_Config();
Delay(0X8FFFFF);
/*------------------------------------------------------------*/
/* 检查是否为独立看门狗复位 */
if (RCC_GetFlagStatus(RCC_FLAG_IWDGRST) != RESET)
{
/* 独立看门狗复位 */
/* 亮红灯 */
LED_RED;
/* 清除标志 */
RCC_ClearFlag();
/*如果一直不喂狗,会一直复位,加上前面的延时,会看到红灯闪烁
在1s 时间内喂狗的话,则会持续亮绿灯*/
}
else
{
/*不是独立看门狗复位(可能为上电复位或者手动按键复位之类的) */
/* 亮蓝灯 */
LED_BLUE;
}
/*--------------------------------------------------------------*/
// 配置按键GPIO
Key_GPIO_Config();
// IWDG 1s 超时溢出
IWDG_Config(IWDG_Prescaler_64 ,625);
//while部分是我们在项目中具体需要写的代码,这部分的程序可以用独立看门狗来监控
//如果我们知道这部分代码的执行时间,比如是500ms,那么我们可以设置独立看门狗的
//溢出时间是600ms,比500ms多一点,如果要被监控的程序没有跑飞正常执行的话,那么
//执行完毕之后就会执行喂狗的程序,如果程序跑飞了那程序就会超时,到达不了喂狗
//的程序,此时就会产生系统复位。但是也不排除程序跑飞了又跑回来了,刚好喂狗了,
//歪打正着。所以要想更精确的监控程序,可以使用窗口看门狗,窗口看门狗规定必须在
//规定的窗口时间内喂狗。
while(1)
{
// 这里添加需要被监控的代码,如果有就去掉按键模拟喂狗,把按键扫描程序去掉
//--------------------------------------------------------------------------
if( Key_Scan(KEY1_GPIO_PORT,KEY1_GPIO_PIN) == KEY_ON )
{
// 喂狗,如果不喂狗,系统则会复位,LED1则会灭一次,如果在1s
// 时间内准时喂狗的话,则绿会常亮
IWDG_Feed();
//喂狗后亮绿灯
LED_GREEN;
}
}
//---------------------------------------------------------------------------
}
下一篇:stm32专题三十五:DAC
史海拾趣
|
STM32F103Z核心板,板载512K SRAM/64M NAND flash http://item.taobao.com/auction/item_detail-db2-2494f2cca7bcf576c2eb50164b94ab8e.htm QQ:21578936 资源: 1:REV1.1版 STM32F103Z核心板,板载512K SRAM/64M NAND flash 2:引出所有I/O口 3:独立BOOT跳针 4:20PIN标准JTAG接口(支持JTA ...… 查看全部问答> |
|
我这个问题好像是新手必问的问题。 在VS2005,没有Wince5.0的仿真程序。现在我要做个Wince5.0 的应用程序,想调测,就必须先接设备。 接设备我是通过ActiveSync4.5做的。 问题是我习惯开发时每一段代 ...… 查看全部问答> |
|
该TDA3560设计为一个3毫米功率LED具有某些特点:(1)高通量输出;(2)超薄;(3)较低的热阻;(4)低功耗;(5)在反射的荧光粉转换的氮化铟镓蓝色发光芯 片到理想的白色;(6)典型的色度坐标x = 0.30,y = 0.29根据CIE1931;(7)本产品本身将保持在符合R ...… 查看全部问答> |
|
请教:在掌握51的基础上,进一步提高是学习ARM呢还是DSP好点呢?学习他们有什么分别? 我想请教大家,现在我对51有一定掌握了,想进一步提高一下,DSP和ARM学习那个好点呢?他们的应用前景怎样?学习起来难易程度又如何?我本人偏向DSP,DSP算法是 精髓,有的研究。这只是我个人看法,不知具体他们的情况如何,还望大家不吝赐教。… 查看全部问答> |
|
USB学习板做完了,最近做了批,大家如果需要可以参与本次团购活动。 团长备案号: EEWORLD_005 团长承诺:我已经详细阅读过论坛自发团购规则,并愿意严格遵照此规则执行,愿意为大家提供货真价实、物美价廉的产品。 【征询贴】链接:ht ...… 查看全部问答> |
|
keil 下编译LM3S9B96官方例程boot_eth出错 官方提供的StellarisWare\\boards\\dk-lm3s9b96\\boot_eth\\ 使用keil的工程编译,出现下面提示: Build target \'boot_eth\'User command #1: armcc --device DLM -I . -E -o bl_config.inc ..\\..\\..\\boot_loader\\bl_config.c--- Error: User ...… 查看全部问答> |
|
最近学习LaunchPAD,在看到这个文档的时候(文档名称Getting Started with the MSP430 LaunchPad--- Student Guide and Lab Manual), 发现一个疑似错误,发帖求证一下! 该文档的第36页, 我用的版本是 好像之前的版本也有这 ...… 查看全部问答> |
|
新手求教。除了传统的PWM输入捕获方式测PWM周期和占空比,还有其他方法可以实现么? 例如,信号输入Pin口外部中断exit(双边沿),开定时器TIM3,不同边沿中断时,记下不同的TIM3->cnt的值。 不知道这样可以否? 因为遇到了非TIMx输入通道的信号测频率和占空比问题,所以想到了这个方法。 请教下各位大大! 还有其他更好的方法么 ...… 查看全部问答> |