



历史上的今天
今天是:2024年11月05日(星期二)
2021年11月05日 | STM32F103ZET6 — USART
2021-11-05 来源:eefocus
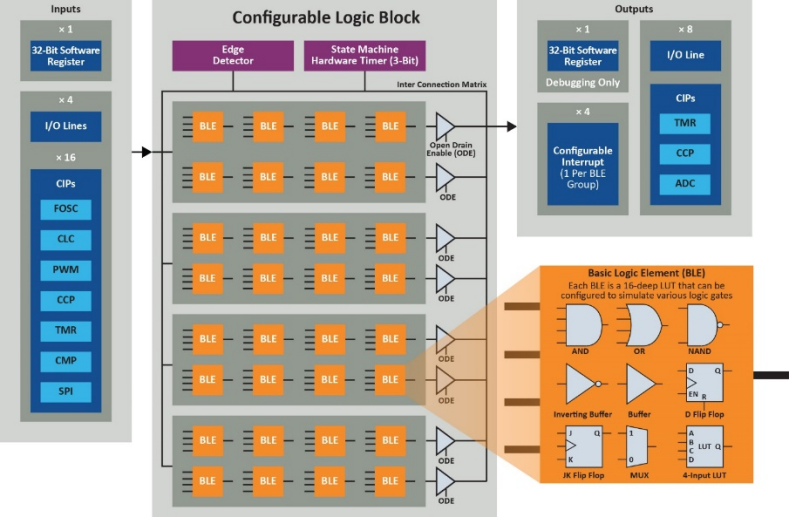
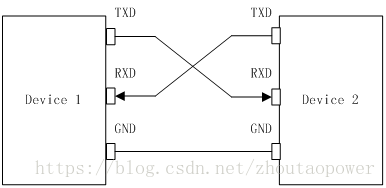
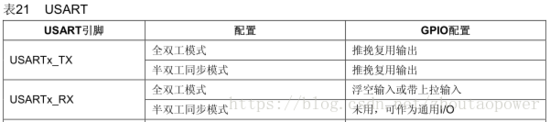
串口通信介绍
UART串口通信,使用三线即可进行最基本的数据收发传送:
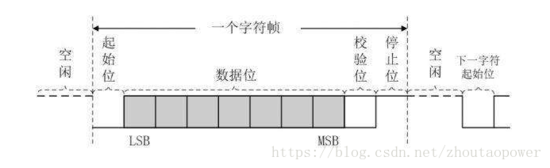
在数据线上的 Timing 遵循标准的串口通信协议,由起始位,数据,校验位,停止位组成,数据传输 LSB -> MSB:
板载 USART 资源介绍
当然,由于电平不一样,使用 RS232 标准进行串口数据传送,需要增加 MAX3232 进行电平转换,再接PC:
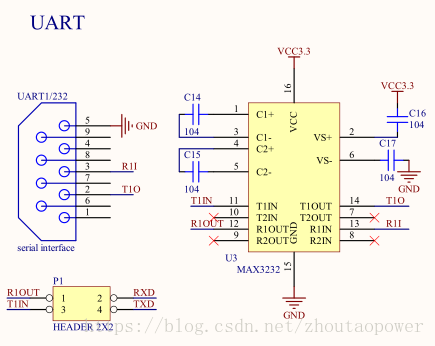
单板上的 T1IN 和 R1OUT 接到了 STM32 芯片的 USART1 的 TXD/RXD 管脚,故单板上使用了 USART1 来作为 RS232 和 PC 机进行数据传送:

USART 初始化配置
既然确定了使用了芯片上的 USART1,要正确使用该功能,需要进行如下配置:
1. 开启 USART1 时钟源,开启 GPIOA 组时钟源(因为使用 UASRT1之前,对 PA9/PA10 需要对管脚进行配置)
2. 复位 USART1 模块(使用之前,应当首先对该模块进行复位)
3. 配置管脚功能的 Remap
4. 配置 PA9/PA10 管脚,PA9 为 TXD,配置成为推挽输出,PA10 配置成为浮空输入
5. 配置串口的波特率(9600),数据长度(8bit),停止位(1bit),校验位(无),以及是否开启流控(无)
注意:波特率的配置,遵循一组计算公式(公式复杂),详见 STM32 的芯片手册
6. 配置 NVIC 控制器
7. 配置 USART1 的中断类型(即,工作过程中,会来些什么中断)
8. 使能 USART1 功能
void SK_UartInit(void)
{
GPIO_InitTypeDef stGpioInit;
USART_InitTypeDef stUsartInit;
NVIC_InitTypeDef stNVIC;
/* Step1: Open USART1 And GPIOA Clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
USART_DeInit(USART1);
/* Step2: Config The Pin Remap */
// According to the hardware diagram, just use UART1 On PA9 And PA10 in default
GPIO_PinRemapConfig(GPIO_Remap_USART1, DISABLE);
/* Step3: Config RXD/TXD Mode */
// PA9 As TXD
stGpioInit.GPIO_Pin = GPIO_Pin_9;
stGpioInit.GPIO_Speed = GPIO_Speed_50MHz;
stGpioInit.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &stGpioInit);
// PA10 As RXD
stGpioInit.GPIO_Pin = GPIO_Pin_10;
stGpioInit.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &stGpioInit);
/* Step4: Reset USART1 before use it */
USART_DeInit(USART1);
/* Step5: Configure the UART Basic Settings */
stUsartInit.USART_BaudRate = 9600;
stUsartInit.USART_WordLength = USART_WordLength_8b;
stUsartInit.USART_StopBits = USART_StopBits_1;
stUsartInit.USART_Parity = USART_Parity_No;
stUsartInit.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
stUsartInit.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &stUsartInit);
// Configure RX Interrupt
stNVIC.NVIC_IRQChannel = USART1_IRQn;
stNVIC.NVIC_IRQChannelPreemptionPriority= 3 ;
stNVIC.NVIC_IRQChannelSubPriority = 3;
stNVIC.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&stNVIC);
#ifndef USART_USE_DMA
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
#endif
USART_DMACmd(USART1, USART_DMAReq_Rx, ENABLE);
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);
// Enable Usart1
USART_Cmd(USART1, ENABLE);
}
在配置过程中,只打开了 RX 接收中断
TX 发送数据时刻,只需 polling 是否发送完成,在进行下一次的数据发送即可。
值得注意的是,数据收发都是使用了同一个DR寄存器,不同时刻,由硬件来进行区分。
USART 数据 TX 发送(Polling)
STM32 USART 数据发送是通过往 USART 的 DR 寄存器写值完成的,DR 寄存器支持每次写 1 Byte 的数据,每次写完数据后,硬件会将 DR 寄存器的值送到移位寄存器中,将数据发送出去。软件需要 polling 硬件的 TC (Transfer Complete)标志位,待 1 Byte 数据发送完成后,再次进行下一个数据的发送:
void SK_UsartSendChar(uint8_t ch)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC) == RESET);
USART_SendData(USART1, ch);
}
void SK_UsartSendData(uint8_t *buf, uint32_t len)
{
uint32_t i = 0;
for (i = 0; i < len; i++)
SK_UsartSendChar(buf[i]);
}
USART 数据 RX 接收(IRQ)
对于数据接收,使用 Polling 显然不是一种好办法,用中断的方式进行数据接收,接收的数据带简单的自定义格式:帧头+长度+Data的方式:
typedef struct {
volatile uint32_t hdr_found;
volatile uint32_t data_len;
volatile uint32_t data_ready;
}SK_USART_RX_CTL_t;
SK_USART_RX_CTL_t g_stUsartRxCtl;
uint8_t g_SK_UsartRxDataBuf[SK_USART_RX_BUF_LEN] = {0};
/*
* Protocol: 1st. Frame start at 0x5A
* 2nd. Second is data length
* 3rd. Data
*/
/*
void USART1_IRQHandler(void)
{
uint8_t rx_data = 0;
static uint8_t cnt = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE))
{
rx_data = USART_ReceiveData(USART1);
}
if (SK_USART_RX_FRM_HEADER == rx_data && !g_stUsartRxCtl.hdr_found)
{
g_stUsartRxCtl.hdr_found++;
return;
}
if (g_stUsartRxCtl.hdr_found && g_stUsartRxCtl.data_len == 0)
{
g_stUsartRxCtl.data_len = rx_data;
if (g_stUsartRxCtl.data_len > SK_USART_RX_BUF_LEN)
g_stUsartRxCtl.data_len = SK_USART_RX_BUF_LEN;
return;
}
if (cnt < g_stUsartRxCtl.data_len)
{
g_SK_UsartRxDataBuf[cnt++] = rx_data;
if (g_stUsartRxCtl.data_len == cnt)
{
g_stUsartRxCtl.data_ready = 1;
cnt = 0;
SK_SetLedStatus(SK_LED_1, SK_LED_ON);
delay_ms(2000);
SK_SetLedStatus(SK_LED_1, SK_LED_OFF);
SK_UsartSendData(g_SK_UsartRxDataBuf, g_stUsartRxCtl.data_len);
}
}
}
USART 数据 RX 接收(IRQ + DMA)
虽然可以使用 IRQ 的方式进行一个 Byte 一个 Byte 的数据接收(中断),但您不觉得这会让 CPU 累死么?看着都费劲。
好嘛,STM32 UASRT 数据接收又不带 FIFO,不过没关系,用 DMA 放飞 CPU 吧!!
STM32 的 DMA1 支持 7个通道:
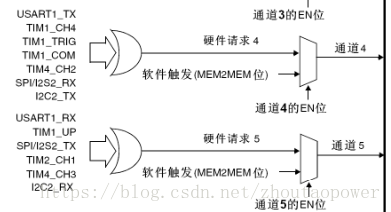
如上图所示:Ch4 用作 USART1_TX,Ch5 用作 USART1_RX。让 CPU 在歇一会。 转存失败重新上传取消
转存失败重新上传取消
USART DMA 配置
DMA 指的是 (Direct Memory Access)直接内存存取,不经过 CPU。STM32 的 DMA 支持外设到内存,内存到外设,以及内存到内存。只要咱们告诉 DMA 控制器,从什么地方去取外设数据,数据有多少,数据宽度是多少,以及将数据放置到内存的什么地方,它便可以带你飞。
当然,DMA 也支持中断的配置,能够配置成为数据传送一半的时候来中断,or,数据传送完来中断,从各方面解决了您的烦恼。让您无忧无虑进行数据传送。
回到正题上来,配置 USART DMA要有入下几个步骤:
1. 开启 DMA1 时钟(这不废话么)
2. 配置 NVIC,并使能(也是废话)
3. 复位 DMA1 的 Ch4/Ch5
4. 设定外设地址为 USART1 的 DR 寄存器,即数据寄存器
5. 设置接收数据的内存地址(本地的一个缓存 RX BUF指针)
6. 设置数据方向为 USART1 的 DR 寄存器 ----> 内存
7. 设置 DMA 传输的数据大小(最大 65536)
8. 设置关闭外设地址自动增加
9. 设置启用缓存 BUF 地址自动增加 (数据传来后,自动存在本地 RX BUF 并指针递增)
10. 配置外设传输数据宽度为 8bit (USART DR 寄存器就 8bit)
11. 配置本地缓存数据宽度为 8bit
12. 配置 DMA 传输模式为 one shot(即传输完一次后,就停止了,也可以配置成为循环模式)
13. 设置 DMA CH15 的优先级
14. 关闭 memory to memory(废话,使用的是外设到内存的数据传输)
15. 开启 DMA1 CH15
16. 使能数据传输完成的 DMA1 中断
17. 在 USART 寄存器中,开启 RX DMA 请求(此项是在 USART 寄存器中进行配置)
好啦,此刻配置基本完成:
void SK_UsartDmaInit(void)
{
DMA_InitTypeDef stDMA_InitStructCh4;
DMA_InitTypeDef stDMA_InitStructCh5;
/// Step 1 : Open the DMA1 Clock
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
// NVIC Config
DMA_NVIC_Config();
/// Step 2 : Reset DMA1_CH4(For USART1 TX) and DMA1_CH5(For USART1 RX)
DMA_DeInit(DMA1_Channel4);
// Configure the USART1 TX DMA Transfer for DMA CH4
// Configure the Peripheral address
stDMA_InitStructCh4.DMA_PeripheralBaseAddr = (uint32_t)&USART1->DR;
// Configure the TX Data Buffer address
stDMA_InitStructCh4.DMA_MemoryBaseAddr = (uint32_t)g_SK_UsartTxDataBuf;
// Configure the data direct: Memory to Peripheral
stDMA_InitStructCh4.DMA_DIR = DMA_DIR_PeripheralDST;
// Configure the data Len
stDMA_InitStructCh4.DMA_BufferSize = SK_USART_TX_BUF_LEN;
// Configure the Peripheral Address auto add (disable)
stDMA_InitStructCh4.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
// Configure the Memory Address auto add (enable)
stDMA_InitStructCh4.DMA_MemoryInc = DMA_MemoryInc_Enable;
// Configure the Peripheral Data Size = 1 byte
stDMA_InitStructCh4.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
// Configure the Memory Data Size = 1 byte
stDMA_InitStructCh4.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
// Configure Normal mode
stDMA_InitStructCh4.DMA_Mode = DMA_Mode_Normal;
// Configure Priority as medium
stDMA_InitStructCh4.DMA_Priority = DMA_Priority_Medium;
// Disable memory to memory
stDMA_InitStructCh4.DMA_M2M = DMA_M2M_Disable;
// Config DMA1 CH4
DMA_Init(DMA1_Channel4, &stDMA_InitStructCh4);
// Enable Ch4
DMA_Cmd(DMA1_Channel4, ENABLE);
// Enable IRQ when transfer finished
DMA_ITConfig(DMA1_Channel4, DMA_IT_TC, ENABLE);
/// Step 3: Reset DMA1_CH5(For USART1 RX)
DMA_DeInit(DMA1_Channel5);
// Configure the USART1 RX DMA for DMA CH5
// Configure the Peripheral address
stDMA_InitStructCh5.DMA_PeripheralBaseAddr = (uint32_t)&USART1->DR;
// Configure the TX Data Buffer address
stDMA_InitStructCh5.DMA_MemoryBaseAddr = (uint32_t)g_SK_UsartRxDataBuf;
// Configure the data direct: Memory to Peripheral
stDMA_InitStructCh5.DMA_DIR = DMA_DIR_PeripheralSRC;
// Configure the data Len
stDMA_InitStructCh5.DMA_BufferSize = SK_USART_RX_BUF_LEN;
// Configure the Peripheral Address auto add (disable)
stDMA_InitStructCh5.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
史海拾趣
|
AVR ATMega16 步进电机驱动程序,已经调试通过【转】 这两天做步进电机的驱动成功,现将程序共享,愿起到抛砖引玉的作用。 此程序可驱动五引线步进电机,通过按键可控制步进电机的转速、方向、三种驱动方式,三种驱动方式分别为:单四拍驱动、双四拍驱动、单双八拍驱动,其中以单双八拍驱动转速最慢。 ...… 查看全部问答> |
|
上述代码经过在Quartus II上编译仿真后其波形如图2所示。 设计中适当选取K值特别的重要。如果K值偏大,这样计数器对少量噪声干扰不可能计满,就不会有进位或者借位脉冲,有利于抑制随机噪声;但就会使捕捉带减小,导致环路进入锁定 ...… 查看全部问答> |
|
发送到普通手机上没问题,发送到SP提供商时软吗 int SendSMSForMobile(BOOL bSendConfirmation, BOOL bUseDefaultSMSC, LPCTSTR lpszSMSC, LPCTSTR lpszRecipient, LPCTSTR lpszMessage) { BOOL bRet = FALSE; & ...… 查看全部问答> |