



LiDAR
2022-04-20
LiDAR--Light Detection And Ranging,即激光探测与测量,也就是激光雷达。是利用GPS(Global Position System)和IMU(Inertial Measurement Unit,惯性测量装置)机载激光扫描。其所测得的数据为数字表面模型(Digital Surface Model, DSM)的离散点表示,数据中含有空间三维信息和激光强度信息。应用分类(Classification)技术在这些原始数字表面模型中移除建筑物、人造物、覆盖植物等测点,即可获得数字高程模型(Digital Elevation Model, DEM),并同时得到地面覆盖物的高度。
LIDAR简介
LIDAR(激光雷达)即Light Detection And Ranging,大致分为机载和地面两大类,其中机载激光雷达是一种安装在飞机上的机载激光探测和测距系统,可以量测地面物体的三维坐标。机载LIDAR是一种主动式对地观测系统,是九十年代初首先由西方国家发展起来并投入商业化应用的一门新兴技术。它集成激光测距技术、计算机技术、惯性测量单元(IMU) /DGPS差分定位技术于一体,该技术在三维空间信息的实时获取方面产生了重大突破,为获取高时空分辨率地球空间信息提供了一种全新的技术手段。它具有自动化程度高、受天气影响小、数据生产周期短、精度高等特点。机载LIDAR传感器发射的激光脉冲能部分地穿透树林遮挡,直接获取高精度三维地表地形数据。机载LIDAR数据经过相关软件数据处理后,可以生成高精度的数字地面模型DTM、等高线图,具有传统摄影测量和地面常规测量技术无法取代的优越性,因此引起了测绘界的浓厚兴趣。机载激光雷达技术的商业化应用,使航测制图如生成DEM、等高线和地物要素的自动提取更加便捷,其地面数据通过软件处理很容易合并到各种数字图中。
机载LIDAR技术在国外的发展和应用已有十几年的历史,但是我国在这方面的研究和应用还只是刚刚起步,其中利用航空激光扫描探测数据进行困难地区DEM、DOM、DLG数据产品生产是当今的研究热点之一。该技术在地形测绘、环境检测、三维城市建模等诸多领域具有广阔的发展前景和应用需求,有可能为测绘行业带来一场新的技术革命。、
针对不同的应用领域及成果要求,结合灵活的搭载方式,LiDAR技术可以广泛应用于基础测绘、道路工程、电力电网、水利、石油管线、海岸线及海岛礁、数字城市等领域,提供高精度、大比例尺(1:500至1:10000)的空间数据成果。
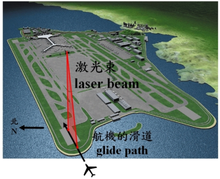
下图为激光雷达的激光束扫瞄机场的滑道,探测飞机将遇到的风切变,即逆风的改变。
工作原理
传感器发射激光束并经空气传播到地面或物体表面,再经表面反射,反射能量被传感器接收并记录为一个电信号。如果将发射时刻和接收时刻的时间精确记录,那么激光器至地面或者物体表面的距离(R)就可以通过以下公式计算出来 R=ct/2,c:光速,t:发射时刻和接受时刻的差。
光脉冲以光速传播, 由激光发射器发射一束离散的光脉冲,打在地表并反射,接收器总会在下一个光脉冲发出之前,收到一个被反射回来的光脉冲,通过记录瞬时红外线激光射到目标的时间从而测出距离。
当代激光雷达一般将发射和接收光路设计为同一光路。
激光扫描设备装置可记录一个单发射脉冲返回的首回波﹑中间多个回波与最后回波,通过对每个回波时刻记录,可同时获得多个高程信息,将IMU/DGPS系统和激光扫描技术进行集成,飞机向前飞行时,扫描仪横向对地面发射连续的激光束,同时接受地面反射回波,IMU/DGPS系统记录每一个激光发射点的瞬间空间位置和姿态,从而可计算得到激光反射点的空间位置。
系统原理
系统组成
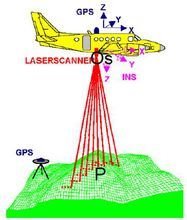
机载L IDAR 系统主要包括:1) 动态差分GPS接收机,用于确定扫描投影中心的空间位置;2) 姿态测量装置( IMU) ,用于测量扫描装置主光轴的空间姿态参数;3) 激光扫描测距系统,用于测量传感器到地面点的距离;4) 一套成像装置(主要是数码相机) ,用于获取对应地面的彩色数码影像,用于最终制作正射影像。
激光扫描测距系统原理
无线电波、X 光、可见光、红外光等都是电磁波。在雷达中,由发射机发出的无线电波射到空中后,一部分经物体或空气反射后,由雷达的接收器系统组成接收,这部分反射波称为雷达信号,反映从反射无线电波的物体到雷达的距离。激光雷达使用的是由激光器发射的红外线,或可见光,或紫外光。激光测距的基本原理是利用光在空气中的传播速度,测定光波在被测距离上往返传播的时间来求得距离值。设光波在某一段距离上往返传播时间为t ,待测定距离可表示为D =1/2ct , (1)式中, c 为光波在真空中的传播速度,约为300 000km/s。只要精确地求出时间就可以求出距离D 。
具体实现方法有脉冲法、相位法和变频法,常用的是脉冲法和相位法。相位法通过量测连续波(continuous wave ,CW) 信号的相位差间接确定传播时间;脉冲法直接量测脉冲信号传播时间。如果物体的表面高低不平,在地面使用三维激光扫描仪,可获得反射物体的表面形貌图;使用机载激光雷达系统,可以获取高精度的数字等高图。
激光扫描方式
一束激光脉冲一次回波只能获得航线下方的一条扫描线上的回波信息,为了获取一系列激光脚点的距离信息,需采用一定的扫描方式进行作业。常用的扫描方式有:线扫描、圆锥扫描、纤维光学阵列扫描等。
1) 线扫描方式:通过摆动式扫描镜和旋转式扫描镜实现,包括平行线形和'Z'字形两种。
2) 圆锥扫描方式:通过倾斜扫描镜实现,扫描镜的镜面具有一定倾角,旋转轴与发射装置的激光束
成45°夹角,随载体的运动光斑在地面上形成一系列有重叠的椭圆。
3) 纤维光学阵列扫描方式:光纤沿一条直线排列,光斑在地面上形成平行或'Z'形扫描线。
- 意法半导体完成收购恩智浦MEMS业务,扩展传感器实力
- 思特威推出全新1200万像素AI眼镜应用CMOS图像传感器
- 南芯科技推出大带宽高精度集成式电流传感器,进军磁传感市场
- 全新OptoTEC@MSX多级热电制冷器可提供超紧凑设计,实现真空中高达100至120°C温差
- 利用 GMSL 打造高性能机器人视觉
- 【激光测距系统,不只是几颗芯片】芯佰微模拟信号链解决方案
- Altera 25G Holoscan 传感器桥接器演示荣获Embedded Computing Design最佳展品奖
- 弥合传感器融合鸿沟:FPGA如何助力边缘端实时机器人应用
- 禾赛 2025 年中国车载主激光雷达市占率第一
- 贸泽电子开售适用于工业自动化的 Omron Electronics全新E8Y-L带数字显示器的微压传感器
- “暗光之王”系列再增新品!思特威推出800万像素4K高清超星光级智能安防应用CMOS图像传感
- 达尼森推出高精度钳位式直流和交流电流传感器具有高精度、卓越的相位偏移性能与高频带
- 芯片厂商集体“站队”英伟达,机器人这项技术要崛起?
- 南芯科技推出大带宽高精度集成式电流传感器,进军磁传感市场
- Altera 25G Holoscan 传感器桥接器演示荣获Embedded Computing Design最佳展品奖
- 思特威推出全新1200万像素AI眼镜应用CMOS图像传感器
- 全新OptoTEC@MSX多级热电制冷器可提供超紧凑设计,实现真空中高达100至120°C温差
- 利用 GMSL 打造高性能机器人视觉
- 禾赛 2025 年中国车载主激光雷达市占率第一
-

直播回放: 如何使用MPLAB® Mindi™软件进行模拟电路仿真
-

直播回放: 开启 SDV 的未来:集成 TI 的远程控制边缘节点解决方案
-

直播回放: 2026 是德科技XR8新品发布: 一段跨越70年的示波器创新之旅
-

直播回放: 使用RUHMI模型转换器部署BYOM模型并进行MINST模型部署
-

直播回放: 使用Reality AI Tools 基于数据创建微小型AI模型以及进行拉弧检测开发实践
-

直播回放: MPS 赋能人形机器人 - 因为没有运动,机器人只是一尊雕塑
-

1瓦线性调频增强器
-

家用电器遥控器
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外开关
-

DS1669数字电位器
-

HA1377 桥式放大器 BCL 电容 17W(汽车音频)