



mini2440 按键驱动POLL机制实验
2022-10-13 来源:csdn
Makefile
KERN_DIR = /home/grh/kernel_source_code/linux-2.6.32.2
all :
make -C $(KERN_DIR) M=`pwd` modules
arm-linux-gcc key_interrupt_app.c -o key_interrupt_app
clean :
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
obj-m += test_driver.o
obj-m += key_poll.o
obj-m += key_interrupt.o
copy :
cp key_interrupt.ko key_interrupt_app /nfs
驱动源代码,就只是添加了Poll相关的部分
#include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #include #define GRH_MODULE_NAME 'key_interrupt' static int major; static struct class *key_interrupt_class; static struct class_device *key_interrupt_device; static int key_value; //wait_event_interruptible函数需要的两个变量 static DECLARE_WAIT_QUEUE_HEAD(grh_wait_interrupt); //休眠的进程队列头 static volatile int sleep_for_interrupt; //这个变量为0的时候read函数会休眠,中断里面将其置1,read函数末尾将其设置为0 //pin_desc是对每一个按键中断的描述,不仅仅可以是整数,也可以是更复杂到的字段,这里用简单的按键值就行了 int pin_desc[6] = { 1, 2, 3, 4, 5, 6 }; //中断处理函数 static irqreturn_t grh_handle_key_eint(int irq, void *dev_id){ int *p; p = dev_id; //printk(KERN_EMERG'key pressed! key=%dn', *p); key_value = *p; //唤醒休眠的进程 sleep_for_interrupt = 1; wake_up_interruptible(&grh_wait_interrupt); return IRQ_HANDLED; } static void init_key(void){ //注册irq中断处理函数,将按键值和中断号绑定,所有清中断操作以及初始化中断相关寄存器的操作全部交给 //内核自动完成了,不再需要像裸机程序一样显式地对寄存器进行读写了,中断发生后会自动跳到grh_handle_key_eint request_irq(IRQ_EINT8, grh_handle_key_eint, IRQ_TYPE_EDGE_BOTH, 'key1', pin_desc); request_irq(IRQ_EINT11, grh_handle_key_eint, IRQ_TYPE_EDGE_BOTH, 'key2', pin_desc+1); request_irq(IRQ_EINT13, grh_handle_key_eint, IRQ_TYPE_EDGE_BOTH, 'key3', pin_desc+2); request_irq(IRQ_EINT14, grh_handle_key_eint, IRQ_TYPE_EDGE_BOTH, 'key4', pin_desc+3); request_irq(IRQ_EINT15, grh_handle_key_eint, IRQ_TYPE_EDGE_BOTH, 'key5', pin_desc+4); request_irq(IRQ_EINT19, grh_handle_key_eint, IRQ_TYPE_EDGE_BOTH, 'key6', pin_desc+5); } static int key_interrupt_open(struct inode *inode, struct file *file){ printk(KERN_EMERG'DRIVER: OPENn'); sleep_for_interrupt = 0; init_key(); return 0; } static ssize_t key_interrupt_write(struct inode *inode, const char __user *buf, size_t count, loff_t *ppos){ printk(KERN_EMERG'DRIVER: WRITEn'); return 0; } static ssize_t key_interrupt_read(struct file *file, char __user *buf, size_t count, loff_t *ppos){ printk(KERN_EMERG'DRIVER: READn'); //根据sleep_for_interrupt的数值决定是否将驱动进程加进休眠队列grh_wait_interrupt中,立即休眠进程 wait_event_interruptible(grh_wait_interrupt, sleep_for_interrupt); copy_to_user(buf, &key_value, 4); //下一次进入read的时候继续休眠等待中断发生 sleep_for_interrupt = 0; return 0; } int key_interrupt_release(struct inode *inode, struct file *file){ //注销中断 free_irq(IRQ_EINT8, pin_desc); free_irq(IRQ_EINT11, pin_desc+1); free_irq(IRQ_EINT13, pin_desc+2); free_irq(IRQ_EINT14, pin_desc+3); free_irq(IRQ_EINT15, pin_desc+4); free_irq(IRQ_EINT19, pin_desc+5); printk(KERN_EMERG'DRIVER: RELEASEn'); return 0; } //sys_poll会反复在死循环里面调用key_interrupt_poll unsigned int key_interrupt_poll(struct file *file, struct poll_table_struct *wait){ unsigned int mask; printk(KERN_EMERG'DRIVER POLLn'); poll_wait(file, &grh_wait_interrupt, wait); //把当前进程挂到休眠队列里面,但是不立即休眠 mask = 0; if(sleep_for_interrupt){ //中断发生了 mask |= POLLIN | POLLRDNORM; //把有可读数据的标志位设置为1,用户层可以得到这个mask } return mask; /* 如果返回的mask是0那么进程直接进入定时休眠,如果在定时休眠过程中中断发生了,sys_poll里面的 定时休眠结束,sys_poll又会循环调用key_interrupt_poll,但这个时候mask一定返回非零数值了,这时 sys_poll中的休眠结束,进程继续运行。如果定时休眠过程中中断一直没有发生,那么定时休眠超时之后, sys_poll再调用一次key_interrupt_poll,然会判断是否超时,如果超时直接结束进程的休眠。这是 Linux内核的poll机制的大概原理,这样在用户层调用一次poll函数,进程最多休眠时间就是传进来的wait参数, 中断一发生,定时休眠立刻结束,否则进程就休眠到一次定时休眠结束为止。 */ } static struct file_operations key_interrupt_fops = { .owner = THIS_MODULE, .open = key_interrupt_open, .write = key_interrupt_write, .read = key_interrupt_read, .release = key_interrupt_release, .poll = key_interrupt_poll }; int key_interrupt_module_init(void){ printk(KERN_EMERG'INIT MODULE!n'); //register the driver with the device major = register_chrdev(0, GRH_MODULE_NAME, &key_interrupt_fops); //create my own device class key_interrupt_class = class_create(THIS_MODULE, 'key_interrupt_class'); //create my device of my own class key_interrupt_device = device_create(key_interrupt_class, NULL, MKDEV(major,0), NULL, 'key_interrupt_device'); return 0; } void key_interrupt_module_exit(void){ unregister_chrdev(major, GRH_MODULE_NAME); device_unregister(key_interrupt_device); class_destroy(key_interrupt_class); printk(KERN_EMERG'EXIT MODULE!n'); } module_init(key_interrupt_module_init); module_exit(key_interrupt_module_exit); MODULE_AUTHOR('GRH'); MODULE_VERSION('1.0'); MODULE_DESCRIPTION('KEY POLL DRIVER'); MODULE_LICENSE('GPL'); 用户空间测试程序,每次在Poll之后判断是不是发生了中断,如果发生了中断就打印按键值,如果超时了就直接退出程序 #include #include #include #include #include #include #include int main(void){ struct pollfd fds[1]; int i, sum, ret; int key_value; int fd; fd = open('/dev/key_interrupt_device', O_RDWR); if(-1 == fd){ printf('open key device error!n'); return -1; } fds[0].fd = fd; fds[0].events = POLLIN; while(1){ ret = poll(fds, 1, 5000); //只监控一个设备,这里不使用poll的多路复用功能,休眠延时是5000ms if(-1 == ret){ printf('poll error!n'); break; } else if(0 == ret){ printf('poll time out!n'); break; } else{ //读操作结束的时候自然驱动程序里面的中断发生的标志sleep_for_interrupt //就清空了,实际上read的时候该标志比为1,进程已经不可能进入休眠了,因为poll //返回正值的时候,才会进入read read(fd, &key_value, 4); printf('key pressed : %dn', key_value); } } close(fd); return 0; } 测试结果(经过测试在timeout情况下,驱动里面poll会调用两次,这和Linux内核中poll机制的实现是吻合的,内核里面实现Poll机制的源代码这里就不分析了,有兴趣的自己去读一下吧,这里只是我自己对实验代码做一个记录而已):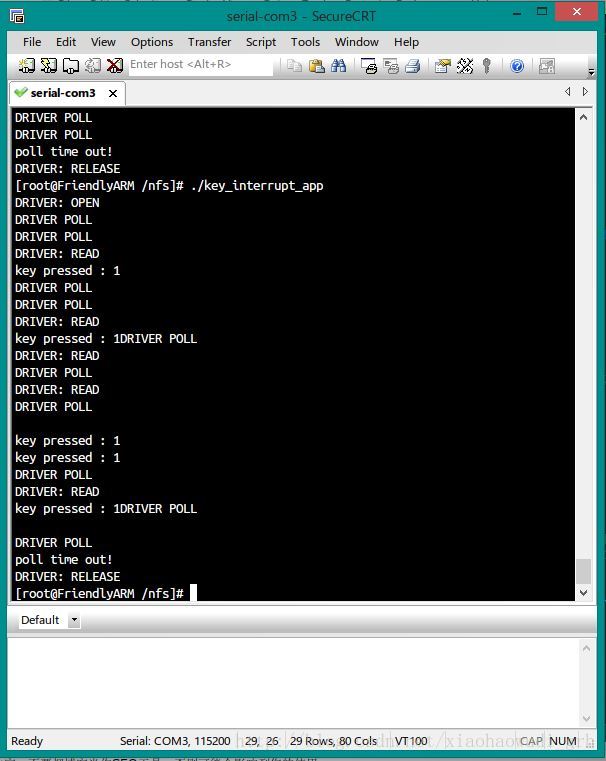
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 有源晶振与无源晶振的六大区别详解
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 蓝牙信道探测技术原理与开发套件实践
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

家用电器遥控器
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外开关
-

DS1669数字电位器
-

HA1377 桥式放大器 BCL 电容 17W(汽车音频)