



机器视觉缺陷检测-边学边做-相机选取
2025-09-23 来源:elecfans
主要分为三部分
1.相机示意图及基本结构
2.相机参数确定方法
3.最终选择
1.相机示意图及基本结构
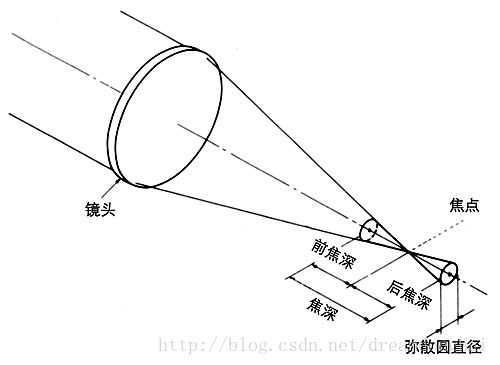
简图↑
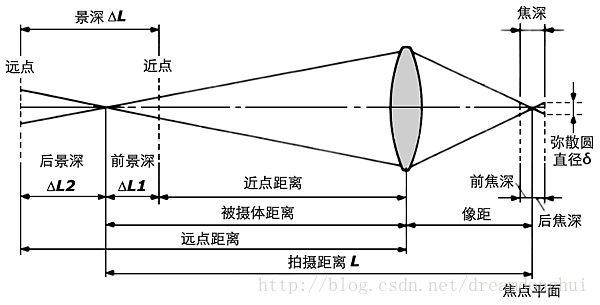
全图↑
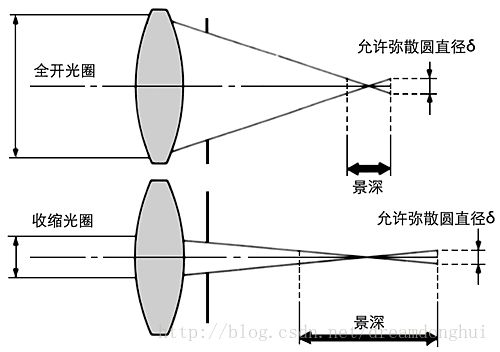
光圈与景深↑
2.相机基本参数确定
视野与像素确定
被检测石英镜片的最大直径为38.6mm。也就是最大弥散圆直径。

样品↑
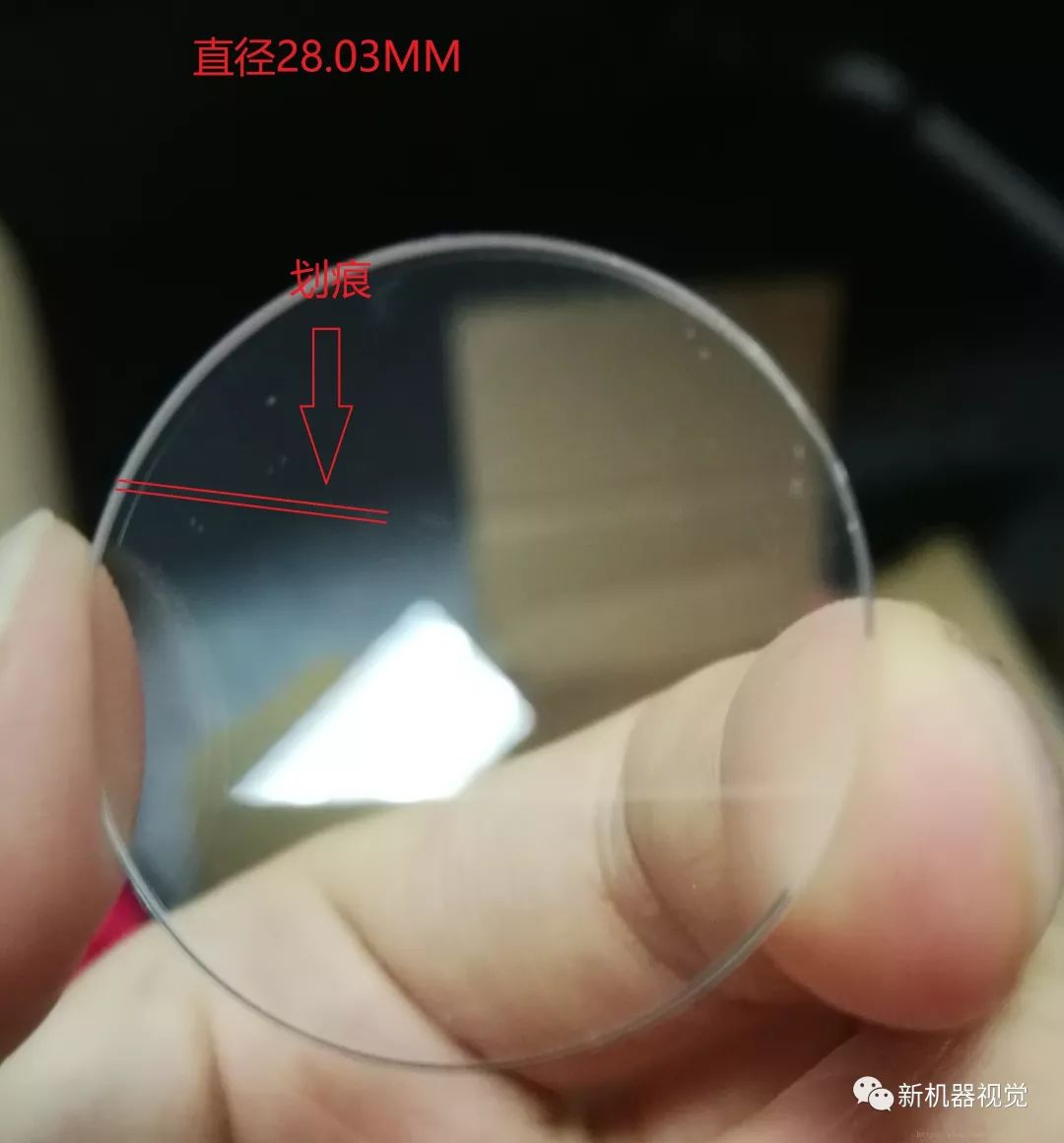
较小划痕样本↑
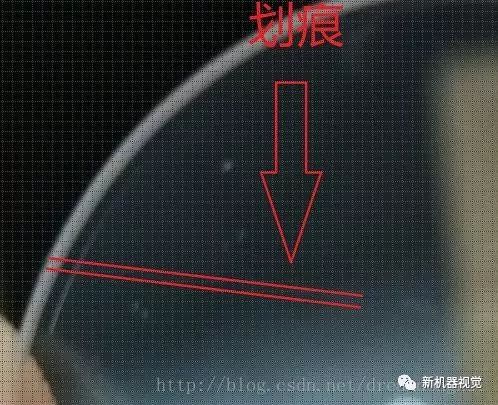
划痕测量↑ 如上图,以直径为28.3的镜片来计算像素大小。相较于缺口,划痕的宽度更小,更不容易识别。相机的像素确定将基于划痕。由图可以看出,一个方格的大小基本跟划痕宽度大小相匹配。一个方框即可以作为一个像素点。像素大小为

实际应用过程中,镜片直径会超出以上两个样本。所以,设计时应留有余量,以50MM*50MM的视野进行计算。在此视野下如果想达到以上所计算的清晰度,像素应为:

为了获得更清晰的图像,便于后期进行图像处理,用四个像素点来描述一个划痕宽度,得到更为合适的分辨率

至此,像素参数确定,应选择至少45万像素相机。相机视野应能调整到50MM*50MM。
相机分辨率选择的过程基本为:1、确定精度要求最高的部分需要的像素数;2、计算整个图像需要的像素数;3、确定合适的分辨率;然后就能够得到所需相机的分辨率了,分辨率是一个相机主要的参数。
像素深度
像素深度常见的有8bit,10bit,12bit 现阶段无太大要求。以通用性强为主,主选8bit。
相机种类
CCD相机在今天还是占据工业视觉的很大一部分市场。CMOS相机虽然性能较差一点,但是目前项目来说也是可以接受的。主要后期性价比。
最大帧率/行频
现阶段无要求。机械手速度要远比相机速度要慢。主要看价格。
像元尺寸
只要不是太夸张,现有尺寸安装还是很容易。无要求。
3、相机型号确定
以上是主要的相机参数,相机参数确定之后,就可以根据这些参数,选择常用的相机品牌下的相机参数了。
下一篇:如何快速查找PLC的故障原因?
- 赋能工业、消费及机器视觉: 贸泽开售 ams OSRAM Mira050 NIR增强全局快门图像传感器
- 艾迈斯欧司朗推出专为智能眼镜优化的紧凑型RGGB LED解决方案
- 从拣取、检测到量测:Cincoze Din-Rail电脑 (MD-3000) 为机器视觉打造可靠的实时运算核心
- 米尔与安路联合亮相VisionChina 2025,共推FPGA视觉方案
- 贸泽电子开售Arduino UNO Q 为实时响应的AI驱动机器视觉与声音解决方案提供支持
- 机器视觉图像采集优化方法
- 详解机器视觉软件开发SDK
- Molex莫仕适用于高性能机器视觉系统的先进连接解决方案
- 机器视觉的应用有哪些 机器视觉系统组成及工作原理
- 5G工业网关的“边缘计算+AI推理”一体化设计,PLC协议解析与缺陷检测的实时联动
- 嵌入式的风向变了:2026纽伦堡嵌入式展透露这些趋势
- 高通确认不在GDC 2026发布新款骁龙G系列掌机处理器SoC
- 行业评论 从工具到平台:如何化解跨架构时代的工程开发和管理难题
- 面向嵌入式部署的神经网络优化:模型压缩深度解析
- 摩尔线程MTT S5000全面适配Qwen3.5三款新模型
- Mujoco中添加Apriltag标签并实现相机识别教程
- 英飞凌与宝马集团携手合作,基于Neue Klasse架构塑造软件定义汽车的未来
- 物理AI仿真新突破:摩尔线程与五一视界共建全栈国产化生态
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- 爆火的OpenClaw! 告别云端,米尔RK3576开发板本地部署
- 边缘计算主机盒选购指南:五大核心指标解析
- Arm AGI CPU 更多细节:台积电 3nm 制程、Neoverse V3 微架构
- Arm AGI CPU 重磅发布:构筑代理式 AI 云时代的芯片基石
- Arm 拓展其计算平台矩阵,首次跨足芯片产品
- 阿里达摩院发布RISC-V CPU玄铁C950,首次原生支持千亿参数大模型
- 边缘 AI 加速的 Arm® Cortex® ‑M0+ MCU 如何为电子产品注入更强智能
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- VPU中的“六边形战士”:安谋科技Arm China发布“玲珑”V560/V760 VPU IP
- 利用锚定可信平台模块(TPM)的FPGA构建人形机器人安全
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

FollowMe 第二季:3 - EK_RA6M5 开发板入门
-

FollowMe 第二季: 1 Adafruit Circuit Playground Express及任务讲解
-

Azure RTOS step by step workshop
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

从0到1:树莓派与物联网教程(英文)
-

1瓦线性调频增强器
-

家用电器遥控器
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外开关
-

DS1669数字电位器
-

HA1377 桥式放大器 BCL 电容 17W(汽车音频)