



历史上的今天
今天是:2025年03月18日(星期二)
2019年03月18日 | STM32驱动步进电机
2019-03-18 来源:eefocus
步进电机是将电脉冲信号转变为角位移或线位移,可以通过控制脉冲来控制,因此比一般的电机更精准。这篇文章将会讲述我对四线两项步进电机的调试经验。
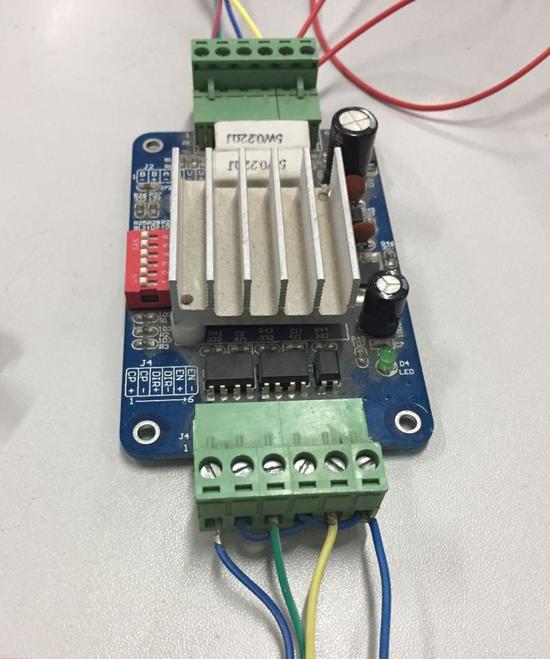
1.步进电机以及THB7128的接线
THB7128步进电机驱动有两个接线口,J4口与stm32的IO口相接,J2口与步进电机和电源相接。
J2口有6个端子,从两个端口旁的接口定义可以看出,接口分别为B-,B+,A-,A+,V-,V+。其中V+与9~32V的电源相接,V-接电源地,其余的接口B+,B-一组,A+,A-一组与步进电机的两组同相线相接(注:想要判断步进电机哪两根线同相,只需用万用表测量,短接的即为同相)。
J4口同样可以从端口定义看出,分别有CP+,CP-,DIR+,DIR-,EN+,EN-6个端子。CP为脉冲信号输入端,DIR为电机正反转控制端,EN为电机脱机控制端。在J4端口有共阳极和共阴极两种接线方法。
共阳极接法:分别将CP+,DIR+,EN+连接到STM32板子的输出电压上,脉冲输入信号通过CP-接入;此时,DIR,EN-在低电平有效。
共阴极接法:分别将CP-,DIR-,EN-连接到控制系统的地端(与电源地隔离);此时脉冲输入信号通过CP+加入,U/D+,EN+在高电平有效。
(注:我采用的是共阴极接法,所以之后只介绍共阴极的程序)
2. THB7128设置
TBH7128有6个拨盘开关(S1~S6),前3个开关控制细分设置,即控制电机每一步转动多少度,步距角=电机固有步距角/细分数。后三个S3~S6设置电流大小,设置的电流不要超过电机的额定电流。具体如何设置根据自己实际情况参考驱动芯片背后的说明表进行调节。说明表所示:


3.程序设计
(1)使步进电机稳定转动
驱动接收到一个脉冲步进电机就动一步,所以我们可以用定时器中断将脉冲按一定的频率从STM32的IO口输入到驱动中,这样就可以使步进电机稳定转动起来
(2)步进电机的开启、截止以及变向
当THB7128使能端EN+接收到高电平时步进电机停止运转,接收到低电平时正常运转。因此改变与EN+相接的IO口的电平高低就可以控制电机的开启与截止。
当正反控制端DIR+接收到高电平时步进电机改变转动方向,改变相应的IO口电平即可让步进电机变向。
(3)步进电机变速
我用的定时器中断来驱动电机转动,所以只要想办法改变定时器中断的参数就可以让电机改变速度
具体程序如下:
①定时器设置及IO口初始化
#include "dianji.h"
#include "led.h"
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
//定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = arr;//自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler = psc;//预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//设置时钟分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //使能指定的TIM3中断,允许更新中断
//中断优先级NVIC设置
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;//TIM3中断
NVIC_InitStructure.NVIC_IRQChannelCmd =ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM3,ENABLE);//使能TIMx
}
void TIM3_IRQHandler(void)//TIM3中断函数
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update) != RESET)//检查TIM3更新中断发生与否
{
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);//清除TIMx更新中断标志
LED0=!LED0;
}
}
void DJ_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能GPIOB
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG,ENABLE);//使能GPIOG
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_4;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_SetBits(GPIOB,GPIO_Pin_6);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOG,&GPIO_InitStruct);
GPIO_SetBits(GPIOG,GPIO_Pin_9);
}
②主函数(具体操作控制)
#include "stm32f10x.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "timer.h"
#include "key.h"
#include "dianji.h"
#define up 1
#define down 0
int main(void)
{
vu8 key = 0;
vu8 key1 = 0;
vu8 num0 = 0;
vu8 num1 = 0;
vu8 num2 = 0;
vu8 speed = 1;
vu16 arrLowest = 189;
vu16 arrMax= 409;
vu16 arr =299;
vu16 psc = 359;
LED_Init();
delay_init();
KEY_Init();
DJ_Init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(115200); //串口初始化为115200
TIM3_Int_Init(arr,psc);//10Khz的计数频率,计数到100为10ms (arr+1)*(psc+1)/72
while(1)
{
key = KEY_Scan(0);
if(key == KEY0_PRES)
{
if(num0 == 0)
{
num0 = 1;
LED1=0;
GPIO_ResetBits(GPIOB,GPIO_Pin_6);
}
else
{
num0 = 0;
LED1=1;
GPIO_SetBits(GPIOB,GPIO_Pin_6);
}
}
if(key == KEY1_PRES)
{
if(num2 == 0)
{
GPIO_SetBits(GPIOG,GPIO_Pin_9);
num2 = 1;
}
else
{
GPIO_ResetBits(GPIOG,GPIO_Pin_9);
num2 = 0;
}
}
while(key == WKUP_PRES)
{
if(speed == down)
{
arr+=2;
TIM3_Int_Init(arr,psc);
delay_ms(50);
key1 = KEY_Scan(0);
if(arr > arrMax)
{
speed = up;
}
if(key1 == WKUP_PRES)//关闭变速
{
LED1 = 0;
key = 0;
}
}
if(speed == up)
{
arr-=2;
TIM3_Int_Init(arr,psc);
delay_ms(50);
if(arr < arrLowest)
{
speed = down;
}
key1 = KEY_Scan(0);
if(key1 == WKUP_PRES)
{
LED1 = 0;
key = 0;
}
}
}
}
}
4.总结
通过以上过程的调试,我实现了用按键控制步进电机的启动、截止、变向以及加减速这些功能。
可能我的电机驱动和大家的不一样, 希望能让读者起到参考作用。
史海拾趣
|
2007年秋桂林市核子软件有限公司招聘信息 2007年桂林市核子软件开发有限公司招聘信息公司简介: 桂林市核子软件开发有限公司主要从事于嵌入式软件及网络新技术的研究和开发,主要由深圳市双赢伟业科技有限公司投资兴办。公司主要客户是双赢伟 ...… 查看全部问答> |
|
红外距离指的是红外光所达到的距离,从几米到几百米,甚至是数公里。而夜间可视距离是通过监视器所能够看到的清晰有效最大距离,是由红外灯的发光距离、摄像机的感红外程度、现场反射红外情况、供电电源的质量及镜头的匹配情况来决定的。它们之间相 ...… 查看全部问答> |
|
向你请教 WINCE + 2410 + I2C + AT24C02 的问题! 我想用 2410 开发板,WinCE 4.2 操作系统,I2C 总线读写 AT24C02 EEPROM。 我已经看懂了 2410 的 I2C 寄存器和 AT24C02 的读写方法;也看懂了 ADS 下的纯 C 语言程序。 因为我以前一直做桌面的程序,底子比较差;就是对 WINCE 下的 I2C 流驱动没 ...… 查看全部问答> |
|
如题,我用cypress的芯片控制nand flash,型号是k9f1g08u0a,gpif波形图如下,现在我换了一个flash,时序上不一样,没弄过这些,不知道这些图形都代表什么,盼高手指点。 d:\\flash\\gpif\\1.jpg d:\\flash\\gpif\\2.jpg d:\\flash\\gpif\\3.jpg ...… 查看全部问答> |
|
本帖最后由 paulhyde 于 2014-9-15 03:51 编辑 做一个低频信号分析仪要求 基本要求 在输入交流信号电压峰峰值Vpp为500m V~5V,频率范围为50Hz~50kHz条件下,完成以下参数测试; 正弦波,三角波和方波频率测试,测量误差小于1%; 正弦波 ...… 查看全部问答> |