



历史上的今天
今天是:2024年12月11日(星期三)
2019年12月11日 | 单片机自行车测速系统+源程序+proteus仿真
2019-12-11 来源:elecfans
自行车测速系统仿真原理图如下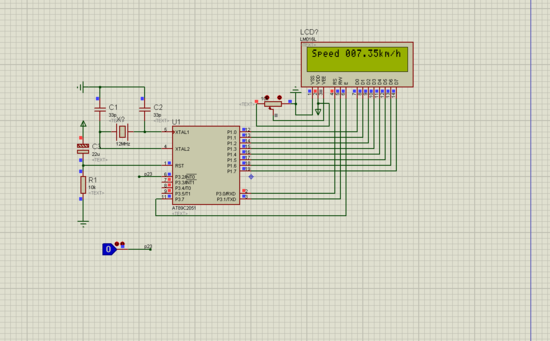
单片机源程序如下:
#include "d:c51reg51.h"
#include "d:c51intrins.h"
sbit LCM_RS=P3^0;
sbit LCM_RW=P3^1;
sbit LCM_EN=P3^7;
#define BUSY 0x80 //常量定义
#define DATAPORT P1
#define uchar unsigned char
#define uint unsigned int
#define L 50
uchar str0[16],str1[16],count;
uint speed;
unsigned long time;
void ddelay(uint);
void lcd_wait(void);
void display();
void initLCM();
void WriteCommandLCM(uchar WCLCM,uchar BusyC);
void STR();
void account();
/*********延时K*1ms,12.000mhz**********/
void int0_isr(void) interrupt 0 /*遥控使用外部中断0,接P3.2口*/
{
unsigned int temp;
time=count;
TR0=0;
temp=TH0;
temp=((temp << 8) | TL0);
TH0=0x3c;
TL0=0xaf;
count=0;
TR0=1;
time=time*50000+temp;
}
void time0_isr(void) interrupt 1 /*遥控使用定时计数器1 */
{
TH0 =0x3c;
TL0 =0xaf;
count++;
}
void main(void)
{
TMOD=0x01; /*TMOD T0选用方式1(16位定时) */
IP|=0x01; /*INT0 中断优先*/
TCON|=0x11; /*TCON EX0下降沿触发,启动T0*/
IE|=0x83;
TH0=0x3c;
TL0=0xaf;
initLCM();
WriteCommandLCM(0x01,1); //清显示屏
for(;;)
{
account();
display();
}
}
void account()
{
unsigned long a;
if (time!=0)
{
a=L*360000000/time;
}
speed=a;
}
void STR()
{
str0[0]='S';
str0[1]='p';
str0[2]='e';
str0[3]='e';
str0[4]='d';
str0[5]=' ';
str0[6]=(speed%100000)/10000+0x30;
str0[7]=(speed%10000)/1000+0x30;
str0[8]=(speed%1000)/100+0x30;
str0[9]='.';
str0[10]=(speed%100)/10+0x30;
str0[11]=speed%10+0x30;
str0[12]='k';
str0[13]='m';
str0[14]='/';
str0[15]='h';
}
void ddelay(uint k)
{
uint i,j;
for(i=0;i for(j=0;j<60;j++) {;} } } /**********写指令到LCD子函数************/ void WriteCommandLCM(uchar WCLCM,uchar BusyC) { if(BusyC)lcd_wait(); DATAPORT=WCLCM; LCM_RS=0; /* 选中指令寄存器*/ LCM_RW=0; // 写模式 LCM_EN=1; _nop_(); _nop_(); _nop_(); LCM_EN=0; } /**********写数据到LCD子函数************/ void WriteDataLCM(uchar WDLCM) { lcd_wait( ); //检测忙信号 DATAPORT=WDLCM; LCM_RS=1; /* 选中数据寄存器 */ LCM_RW=0; // 写模式 LCM_EN=1; _nop_(); _nop_(); _nop_(); LCM_EN=0; } /***********lcd内部等待函数*************/ void lcd_wait(void) { DATAPORT=0xff; //读LCD前若单片机输出低电平,而读出LCD为高电平,则冲突,Proteus仿真会有显示逻辑黄色 LCM_EN=1; LCM_RS=0; LCM_RW=1; _nop_(); _nop_(); _nop_(); while(DATAPORT&BUSY) { LCM_EN=0; _nop_(); _nop_(); LCM_EN=1; _nop_(); _nop_(); } LCM_EN=0; } /**********LCD初始化子函数***********/ void initLCM( ) { DATAPORT=0; ddelay(15); WriteCommandLCM(0x38,0); //三次显示模式设置,不检测忙信号 ddelay(5); WriteCommandLCM(0x38,0); ddelay(5); WriteCommandLCM(0x38,0); ddelay(5); WriteCommandLCM(0x38,1); //8bit数据传送,2行显示,5*7字型,检测忙信号 WriteCommandLCM(0x08,1); //关闭显示,检测忙信号 WriteCommandLCM(0x01,1); //清屏,检测忙信号 WriteCommandLCM(0x06,1); //显示光标右移设置,检测忙信号 WriteCommandLCM(0x0c,1); //显示屏打开,光标不显示,不闪烁,检测忙信号 } /****显示指定坐标的一个字符子函数****/ void DisplayOneChar(uchar X,uchar Y,uchar DData) { Y&=1; X&=15; if(Y)X|=0x40; //若y为1(显示第二行),地址码+0X40 X|=0x80; //指令码为地址码+0X80 WriteCommandLCM(X,0); WriteDataLCM(DData); } /*******显示指定坐标的一串字符子函数*****/ void DisplayListChar(uchar X,uchar Y,uchar *DData) { uchar ListLength=0; Y&=0x01; X&=0x0f; while(X<16) { DisplayOneChar(X,Y,DData[ListLength]); ListLength++; X++; } } void display() { STR(); DisplayListChar(0,0,str0); DisplayListChar(0,1,str1); }
史海拾趣
|
1.大众车系元件功能与检测资料下载>>https://bbs.eeworld.com.cn/thread-281-1-52.html 2.DS2705主控制器数据资料>> https://bbs.eeworld.com.cn/thread-25994-1-16.html 3.CAN总线在混和动力汽车电机控制系统中的应用>> https://bbs.eeworld ...… 查看全部问答> |
|
现在想把原来在WINCE5.0开发的MFC程序移植到WINCE6.0上面, 但一直不能成功.特来请教下: 我现在的环境是VS2005+WINCE6.0 之前在网上找了下, 说是WINCE6.0默认是不支持MFC的.要手动添加几个DLL文件. 现在我也把 MFC80ENU.DLL加进去了, ...… 查看全部问答> |
|
现在在做一个算法的实现,本来用了迭代结构已经实现了,当我想提高速度用流水线结构实现时,发现最高时钟频率居然比迭代结构时候还低,这个感觉跟理论对不上啊。我就是在迭代结构中需要反馈的信号都换成寄存器了,展开成很多级的。 想请问一下有遇 ...… 查看全部问答> |