



历史上的今天
今天是:2025年01月22日(星期三)
2021年01月22日 | STM32如何实现可调频率、占空比的PWM波形,且可指定输出脉冲个数?
2021-01-22 来源:eefocus
读者朋友“*imYan*”问:
pwm实现频率可调和占空比可调后怎么来实现输出10个脉冲呢?我这边看有门控或者单脉冲加重复计数,黄老师平时用的什么方法?
我的回答:
使用两个TIM定时器:一个输出可调频率、占空比的PWM,一个对输出PWM脉冲计数(计时)。
1.门控方式能实现,但需要复杂的配置和计算,不推荐。
2.脉冲计数是比较实际,也是比较简单的方式;
对输出PWM脉冲计数(计时)方法有多种:
1.IO中断计数,或同步定时中断计数:用另外一个定时器,按照相同频率中断计数(类似IO中断);
2.由PWM频率和脉冲个数,计算输出全部所需的时间,使用定时中断,关闭输出PWM;
3.利用定时器外部脉冲触发(外部时钟模式2功能),计数个数为所需脉冲个数(10个脉冲),则关闭输出PWM;
ⅠSTM32定时器
STM32的TIM定时器少则五六个,多则二十个。 可能许多初学者觉得:那么多定时器用的完吗? 那么多不是浪费吗?
这么说吧,STM32的定时器功能非常强大,之所以有那么多定时器,原因在于使用定时器的地方有许多,本文要讲的这个例子只是很基础的一个例子。
当然,可能很多人想问:利用阻塞延时,控制IO高低变化输出PWM这种方式就行啦,也很简单。其实,这种方法的弊端很大。
1.输出的PWM可能存在误差;
2.对整个系统的实时性可能有影响;
所以不建议使用该方法。
Ⅱ几种实现方法
使用两个定时器配合输出可调频率、占空比的PWM波形,且可指定输出脉冲个数的方法和原理其实不难。
输出PWM的方法就是使用TIM定时器自带有的PWM模式即可完成。主要难点在于还要控制指定输出脉冲的个数。
对于如何控制输出指定脉冲个数,下面大概说下三种方法:
1.脉冲中断计数法
IO中断,或者定时器同步(脉冲)中断。
定时器同步(脉冲)中断简单的说,就是利用定时器同时产生一个相同频率(或者说波形)的中断信号,在中断里面对其累计,累加个数为指定输出波形个数则关闭PWM波形的输出,同时关闭中断计数。
比如:我输出10个波形,10次中断(每次+1)之后,关闭输出。
它的原理,大致如下图:
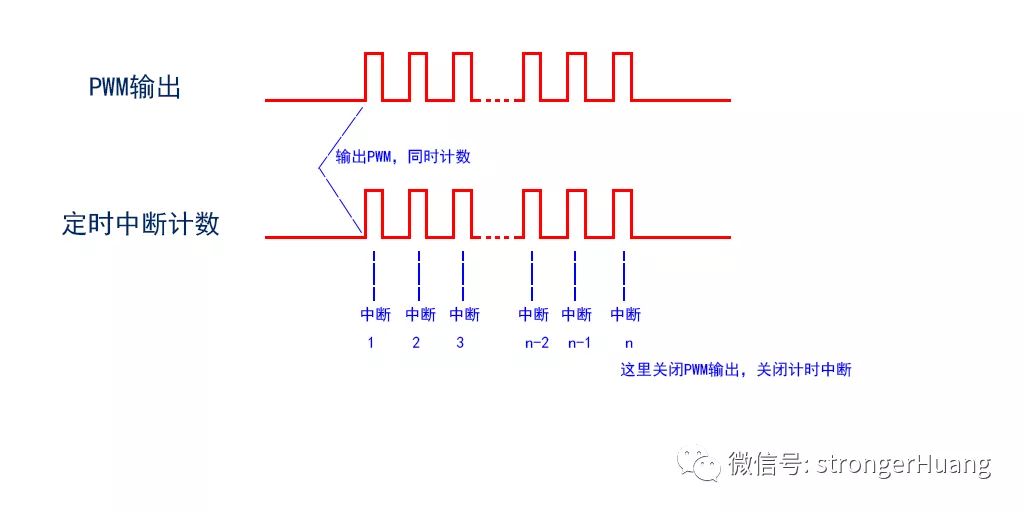
此方法建议在输出高频PWM时不要使用,频繁中断对系统实时性也是有一定影响。 建议低于1KHz的PWM才使用此方法。
2.定时中断法
基于上面第一种,不适合高频PWM脉冲中断。经过思考,我们是否可以将多次中断的时间累加,只响应一次中断。
原理就是把定时的时间设定为单个脉冲的n倍(n个脉冲),只使用一次中断。
它的原理,大致如下图:
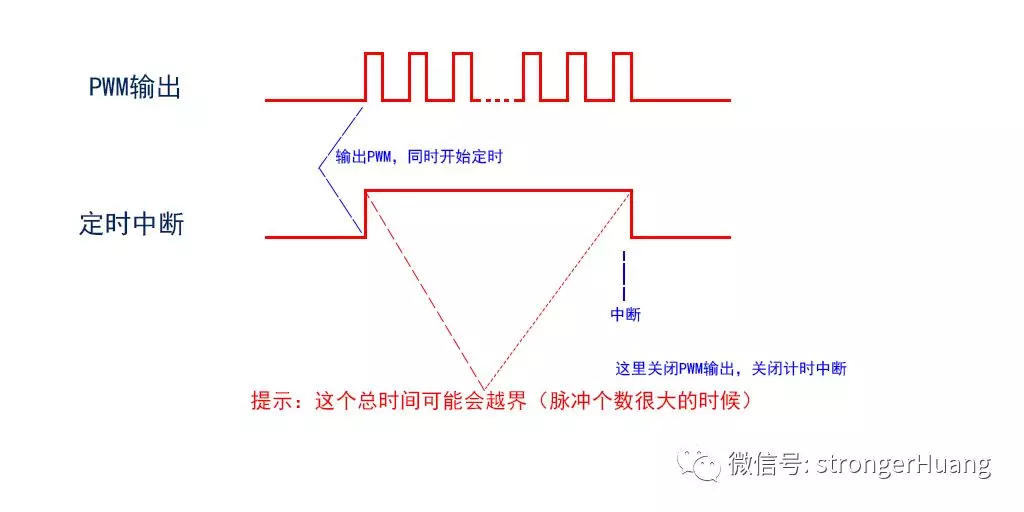
看图片中的提示,建议这个地方使用一个32位的定时器,这个值可能很大。
3.脉冲触发法
此方法可以避免上面两种方法中不足的地方, 相对上面两对实用性更强。电路上面,需要将PWM输出的波形,连接到另一个定时器的ETR引脚。
它的原理没什么特殊的,就是和我们常用的定时更新中断类似,只是输入信号改成PWM脉冲波形(默认为内部时钟CK_INT 如:36M)。
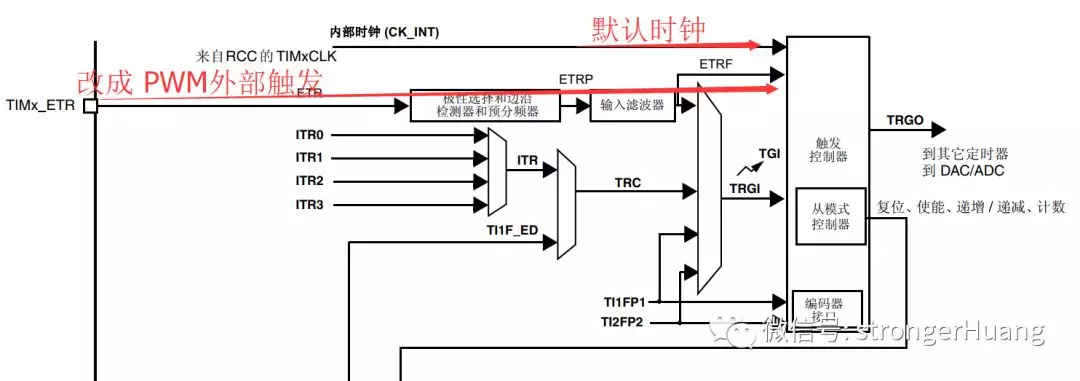
下面章节我就以该方法(第3种方法),PWM波形作为定时器的输入时钟的方式,用代码给大家讲述一下。
Ⅲ外部时钟源模式2实现方法
上面说过,使用PWM作为另一个定时器的输入时钟,即可达到对PWM计数的功能。
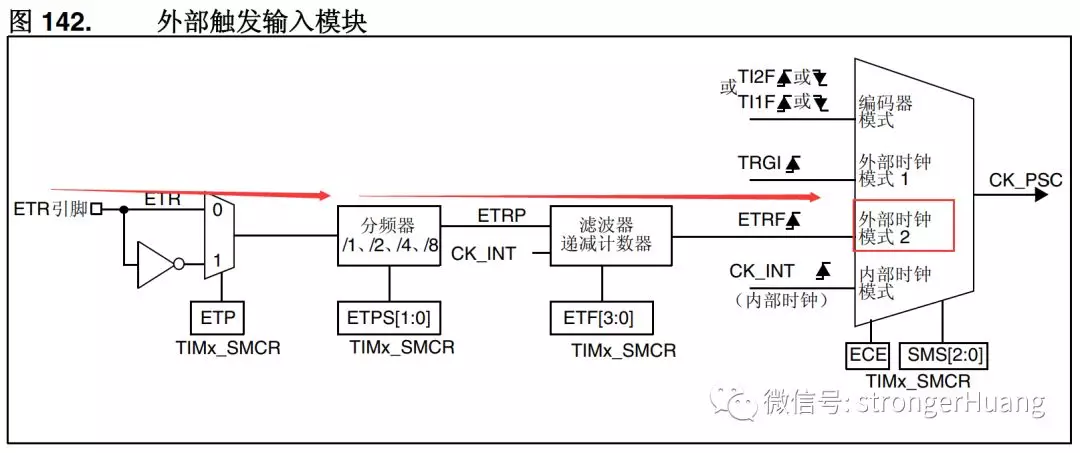
请参看手册中TIM定时器时钟选择章节。
1.输出PWM配置
/************************************************
函数名称 : PWM_TIM_Configuration
功 能 : PWM输出定时器配置
参 数 : 无
返 回 值 : 无
作 者 : strongerHuang
*************************************************/
void PWM_TIM_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/* 时钟配置 */
RCC_APB1PeriphClockCmd(PWM_TIM_CLK, ENABLE);
RCC_AHB1PeriphClockCmd(PWM_TIM_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = PWM_TIM_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(PWM_TIM_GPIO_PORT, &GPIO_InitStructure);
/* 映射配置 */
GPIO_PinAFConfig(PWM_TIM_GPIO_PORT, PWM_TIM_SOURCE, PWM_TIM_AF);
/* 时基配置 */
TIM_TimeBaseStructure.TIM_Prescaler = PWM_PRESCALER; //预分频值
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //定时周期
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //分频因子
TIM_TimeBaseInit(PWM_TIMx, &TIM_TimeBaseStructure);
/* PWM模式配置 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM1模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //使能输出
TIM_OCInitStructure.TIM_Pulse = 0xFFFF; //脉宽值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性
PWM_TIM_OCxInit(PWM_TIMx, &TIM_OCInitStructure);
TIM_Cmd(PWM_TIMx, DISABLE);
}
初始化频率和占空比填充的值是最大值,即TIM_Period = 0xFFFF;TIM_Pulse = 0xFFFF; 实际没有使能定时器(输出的配置见下面函数接口)
2.选择外部时钟,定时中断配置
/************************************************
函数名称 : CNT_TIM_Configuration
功 能 : 计时定时器配置
参 数 : 无
返 回 值 : 无
作 者 : strongerHuang
*************************************************/
void CNT_TIM_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* 时钟配置 */
RCC_APB1PeriphClockCmd(CNT_TIM_CLK, ENABLE);
RCC_AHB1PeriphClockCmd(CNT_TIM_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = CNT_TIM_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(CNT_TIM_GPIO_PORT, &GPIO_InitStructure);
/* 映射配置 */
GPIO_PinAFConfig(CNT_TIM_GPIO_PORT, CNT_TIM_SOURCE, CNT_TIM_AF);
/* NVIC配置 */
NVIC_InitStructure.NVIC_IRQChannel = CNT_TIM_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = CNT_TIM_Priority;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* 使用外部时钟源 */
TIM_ETRClockMode2Config(CNT_TIMx, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_Inverted, 0);
/* 时基配置 */
TIM_TimeBaseStructure.TIM_Prescaler = 0; //预分频值
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseStructure.TIM_Period = 0xFFFF; //定时周期
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //分频因子
TIM_TimeBaseInit(CNT_TIMx, &TIM_TimeBaseStructure);
TIM_ClearFlag(CNT_TIMx, TIM_FLAG_Update);
TIM_ITConfig(CNT_TIMx, TIM_IT_Update, ENABLE); //使能"更新"中断
TIM_Cmd(CNT_TIMx, DISABLE);
}
和常规的不同点在于: 使用外部时钟源
TIM_ETRClockMode2Config(CNT_TIMx, TIM_ExtTRGPSC_OFF, TIM_ExtTRGPolarity_Inverted, 0);
注意检测(捕获)极性TIM_ExtTRGPolarity_Inverted,一般PWM都是高电平为脉冲波形,下降沿才算一个波形的计数。
3.输出PWM函数接口
/************************************************
函数名称 : PWM_Output
功 能 : 输出PWM
参 数 : Frequency --- 频率
Dutycycle --- 占空比(12代表占空比为12%)
NumPulse --- 脉冲个数
返 回 值 : 无
作 者 : strongerHuang
*************************************************/
void PWM_Output(uint32_t Frequency, uint32_t Dutycycle, uint32_t NumPulse)
{
uint32_t pwm_period;
uint32_t pwm_pulse;
/* 输出PWM */
pwm_period = PWM_CK_CNT/Frequency - 1; //计算出计数周期(决定输出的频率)
pwm_pulse = (pwm_period + 1)*Dutycycle / 100; //计算出脉宽值(决定PWM占空比)
TIM_Cmd(PWM_TIMx, DISABLE); //失能TIM
TIM_SetCounter(PWM_TIMx, 0); //计数清零
TIM_SetAutoreload(PWM_TIMx, pwm_period); //更改频率
PWM_TIM_SetComparex(PWM_TIMx, pwm_pulse); //更改占空比
TIM_Cmd(PWM_TIMx, ENABLE); //使能TIM
/* 脉冲个数计时 */
TIM_Cmd(CNT_TIMx, DISABLE);
TIM_SetCounter(CNT_TIMx, 0);
TIM_SetAutoreload(CNT_TIMx, NumPulse-1); //设置中断更新数
TIM_ClearFlag(CNT_TIMx, TIM_FLAG_Update);
TIM_Cmd(CNT_TIMx, ENABLE);
}
void PWM_Output(uint32_t Frequency, uint32_t Dutycycle, uint32_t NumPulse);
我们只需要调用该函数接口就可以实现指定个数PWM输出了。中途不用软件参数,输出结束时自动响应定时中断,关闭定时器。
中断接口函数
/************************************************
函数名称 : CNT_TIM_IRQHandler
功 能 : 计时中断
参 数 : 无
返 回 值 : 无
作 者 : strongerHuang
*************************************************/
void CNT_TIM_IRQHandler(void)
{
if(TIM_GetITStatus(CNT_TIMx, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(CNT_TIMx, TIM_IT_Update);
TIM_Cmd(PWM_TIMx, DISABLE); //关闭PWM输出
TIM_Cmd(CNT_TIMx, DISABLE); //关闭计数
}
}
Ⅳ实际效果和代码
为方便大家,提供了一个简单裸机程序:
int main(void)
{
System_Initializes(); while(1)
{
LED_TOGGLE(); //LED变化
Delay(5); //延时(约240ms)
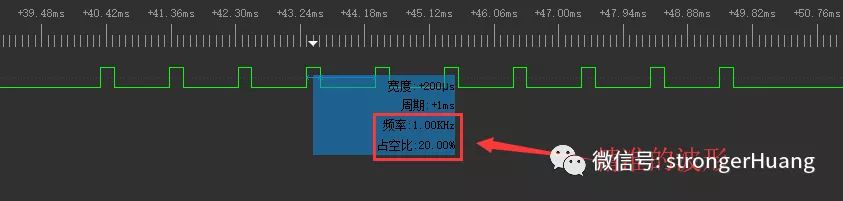
PWM_Output(1000, 20, 10); //1KHz, 20%占空比, 10个脉冲
}
}
main函数中实现效果:间隔240ms(软件延时不精确)输出10个PWM波形

波形具体情况:输出1KHz, 20%占空比, 10个脉冲精确的PWM波形
下载地址(STM32F401为例工程,STM32其他芯片类似):
链接:https://pan.baidu.com/s/10GPPxCky8SZmU9S9pleqJg
密码:4jf3
史海拾趣
|
0 引言 近年来,通信业频率源的大量需求以及军工方面对频率源广泛应用,加之精密导航定位对参考时间的依赖,作为程控交换设备的一级铷原子频标的价格和体积都逐渐接近了高稳定度振荡器。另一方面目前市场用量最大的各种石英晶体谐振器和振荡器的 ...… 查看全部问答> |
|
我是学习电气自动化的应届毕业生,想在毕业后在嵌入式方向发展,但是我在学校只学过80c51单片机和c语言,请各位高手指教一下!我应该从那里入手学习嵌入式呢,谢谢… 查看全部问答> |
|
最近弄了个MSP430的开发板,由于我电脑上没并口所以装了个并口扩展卡,在IAR Embeded Workbench开发环境编译在线调试时总提示设备未连接。重装了下扩展卡驱动还是不行,下载线好像都没问题,弄了好半天确实不知道哪出问题了,还请哪位高 ...… 查看全部问答> |
|
关于uc/OSII的调试?用什么编译器! ___最近在学uc/OSII,要用到BC4.52,但很难下载到,下到的不是IDE,不习惯用命令行方式,请问各位,还有其它更好的编译器可用来调试uc/OSII吗?谢谢!… 查看全部问答> |
|
9263板跑WINCE5,使用SD卡时,时常从串口输出: WaitForSingleObject == WAIT_TIMEOUT (1000) StatusMask = 0x20 status 0xc0c5 这串数据重复输出,并且SD卡读写速度变得非常之慢。 查程序发现是PLATFOM\\COMMON\\SRC\\ARM\\ATMEL\\AT91SAM926 ...… 查看全部问答> |