



89C51单片机驱动8路舵机参考程序
2025-09-28 来源:bilibili
#include<reg51.h>
sbit PWM0 = P1^0;
sbit PWM1 = P1^1;
sbit PWM2 = P1^2;
sbit PWM3 = P1^3;
sbit PWM4 = P1^4;
sbit PWM5 = P1^5;
sbit PWM6 = P1^6;
sbit PWM7 = P1^7;
sbit ADD = P2^1;
sbit SUB = P2^2;
#define uchar unsigned char
#define uint unsigned int
uint t_up0 = 1500; //舵机PWM高电平时间 1000~2000表示1ms到2ms
uint t_up1 = 1500; //1.5ms
uint t_up2 = 1500;
uint t_up3 = 1500;
uint t_up4 = 1500;
uint t_up5 = 1500;
uint t_up6 = 1500;
uint t_up7 = 1500;
uint t0_h;
uint t0_l;
void delayms(uint ms)
{
unsigned char a,b,c;
while(ms--)
{
for(c=1;c>0;c--)
for(b=142;b>0;b--)
for(a=2;a>0;a--);
}
}
void timer_init()
{
EA = 1;
ET0 = 1;
PT0 = 1;
TMOD = 0x11;
TH0 = (65536 - t_up0)/256;
TL0 = (65536 - t_up0)%256; //
}
uchar t0_flag = 0;
uint num_max = 65535; //直接用65535 - t_up 不用变量 - t_up 时,误差较大,原因暂时不明 【注:65536不能存到uint类型变量中】
uint t_change = 63036;//换路周期2.5ms 8路
uchar error0 = 45;
uchar error1 = 45;
uchar error2 = 52;
uchar error3 = 52;
uchar error4 = 57;
uchar error5 = 57;
uchar error6 = 63;
uchar error7 = 63;
uchar error8 = 70;
uchar error9 = 70;
uchar error10 = 76;
uchar error11 = 76;
uchar error12 = 82;
uchar error13 = 82;
uchar error14 = 88;
uchar error15 = 88;
void timer0() interrupt 1
{
if(t0_flag == 0)
{
PWM0 = 1;
TH0 = (num_max - t_up0 + error0)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up0 + error0)%256;
t0_flag = 1;
}
else if(t0_flag == 1)
{
PWM0 = 0;
TH0 = (t_change + t_up0 +error1)/256;
TL0 = (t_change + t_up0 +error1)%256;
t0_flag = 2;
}
else if(t0_flag == 2)
{
PWM1 = 1;
TH0 = (num_max - t_up1 + error2)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up1 + error2)%256;
t0_flag = 3;
}
else if(t0_flag == 3)
{
PWM1 = 0;
TH0 = (t_change + t_up1 +error3)/256;
TL0 = (t_change + t_up1 +error3)%256;
t0_flag = 4;
}
else if(t0_flag == 4)
{
PWM2 = 1;
TH0 = (num_max - t_up2 + error4)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up2 + error4)%256;
t0_flag = 5;
}
else if(t0_flag == 5)
{
PWM2 = 0;
TH0 = (t_change + t_up2 +error5)/256;
TL0 = (t_change + t_up2 +error5)%256;
t0_flag = 6;
}
else if(t0_flag == 6)
{
PWM3 = 1;
TH0 = (num_max - t_up3 + error6)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up3 + error6)%256;
t0_flag = 7;
}
else if(t0_flag == 7)
{
PWM3 = 0;
TH0 = (t_change + t_up3 +error7)/256;
TL0 = (t_change + t_up3 +error7)%256;
t0_flag = 8;
}
else if(t0_flag == 8)
{
PWM4 = 1;
TH0 = (num_max - t_up4 + error8)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up4 + error8)%256;
t0_flag = 9;
}
else if(t0_flag == 9)
{
PWM4 = 0;
TH0 = (t_change + t_up4 +error9)/256;
TL0 = (t_change + t_up4 +error9)%256;
t0_flag = 10;
}
else if(t0_flag == 10)
{
PWM5 = 1;
TH0 = (num_max - t_up5 + error10)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up5 + error10)%256;
t0_flag = 11;
}
else if(t0_flag == 11)
{
PWM5 = 0;
TH0 = (t_change + t_up5 + error11)/256;
TL0 = (t_change + t_up5 + error11)%256;
t0_flag = 12;
}
else if(t0_flag == 12)
{
PWM6 = 1;
TH0 = (num_max - t_up6 + error12)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up6 + error12)%256;
t0_flag = 13;
}
else if(t0_flag == 13)
{
PWM6 = 0;
TH0 = (t_change + t_up6 + error13)/256;
TL0 = (t_change + t_up6 + error13)%256;
t0_flag = 14;
}
else if(t0_flag == 14)
{
PWM7 = 1;
TH0 = (num_max - t_up7 + error14)/256; //+?是为了抵消执行语句花的时间
TL0 = (num_max - t_up7 + error14)%256;
t0_flag = 15;
}
else if(t0_flag == 15)
{
PWM7 = 0;
TH0 = (t_change + t_up7 + error15)/256;
TL0 = (t_change + t_up7 + error15)%256;
t0_flag = 0;
}
}
void main()
{
uint t_while;
timer_init();
TR0 = 1;
while(1)
{
if(ADD == 0)
{
delayms(2);
if(ADD == 0)
{
if(t_up0 <= 1950)
{
t_up0 = t_up0 + 50;
t_up1 = t_up1 + 50;
t_up2 = t_up2 + 50;
t_up3 = t_up3 + 50;
t_up4 = t_up4 + 50;
t_up5 = t_up5 + 50;
t_up6 = t_up6 + 50;
t_up7 = t_up7 + 50;
}
t_while = 50000;
while(t_while--) //
{
if(ADD == 1)
break;
}
}
}
if(SUB == 0)
{
delayms(2);
if(SUB == 0)
{
if(t_up0 >= 1050)
{
t_up0 = t_up0 - 50;
t_up1 = t_up1 - 50;
t_up2 = t_up2 - 50;
t_up3 = t_up3 - 50;
t_up4 = t_up4 - 50;
t_up5 = t_up5 - 50;
t_up6 = t_up6 - 50;
t_up7 = t_up7 - 50;
}
t_while = 50000;
while(t_while--)
{
if(SUB == 1)
break;
}
}
}
}
}
上一篇:基于51单片机的电话拨号报警器
下一篇:51单片机考试常见简答题
- 意法半导体发布Stellar P3E 汽车MCU内置AI加速
- 德州仪器 (TI) 扩展微控制器产品组合及软件生态系统,助力边缘 AI 在各种器件中落地
- 3D打印“狂飙”背后:兆易创新GD32 MCU多元方案驱动性能升级
- 基于恩智浦MCU的人形机器人灵巧手解决方案
- 国民技术发布N32H49x系列MCU:以澎湃性能与全链路可靠赋能工业控制、储能与光通信
- 英飞凌推出基于PSOC™ Control C3微控制器的ModusToolbox™电源套件
- 让AI为你优化代码,提升MCX MCU程序开发效率!攻略在此~
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 英飞凌强化车规级微控制器产品组合:符合ISO/SAE 21434标准、获中汽研认证
- 国产高性能MCU芯片DF30量产,突破进口依赖,国产汽车“大脑”升级
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 有源晶振与无源晶振的六大区别详解
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦线性调频增强器
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

红外开关
-

LM317过压保护
-
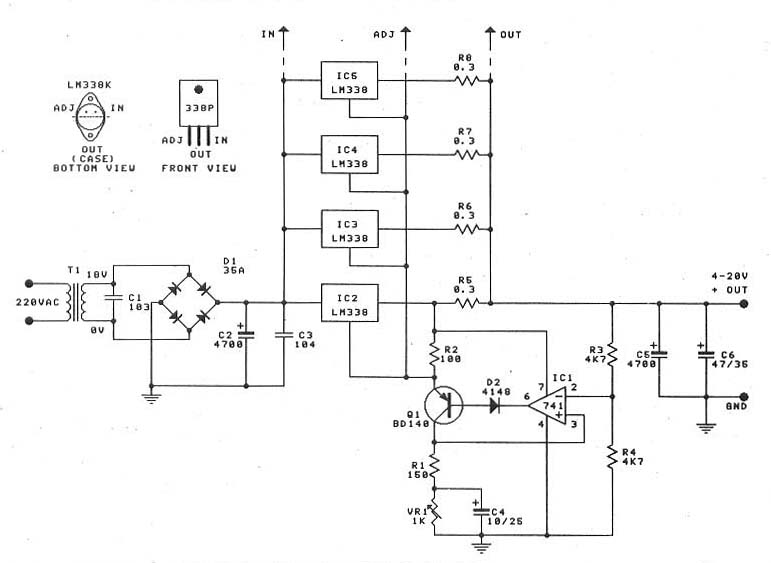
0-30V/20A 大功率稳压电源(采用LM338)