



基于 Microchip ATSAME54 + ams OSRAM EVIYOS 2.0 的 10base T1S 万级像素大灯方案
2025-04-01 来源:cnblogs
像素大灯,也称为矩阵式大灯或像素化LED大灯,是一种先进的车辆照明技术,它将多个小的LED单元组合成一个高分辨率的光源。它具有如下优势:
精确控制的光束:像素大灯可以精确控制每个LED单元的亮度和方向,从而提供高度定制化的照明模式,适应不同的驾驶环境和需求。
减少眩光:在远光灯模式下,像素大灯可以自动调整光束方向和亮度,避免对迎面而来的车辆造成眩光,同时保持驾驶员的视野清晰。
更好的视野:通过调整不同的LED单元,像素大灯可以在不干扰其他驾驶员的情况下,照亮道路上的特定区域,提高驾驶员的视野范围和清晰度。
动态照明:像素大灯可以根据车速、转向角度和交通情况动态调整光线分布,提供更安全、更舒适的驾驶体验。
图像投影:某些像素大灯技术能够将图像或符号投影到道路上,如交通标志、警告信息或其他导航辅助图形。
节能高效:像素大灯通常采用LED技术,比传统的卤素灯或氙气灯更节能,使用寿命更长。
设计灵活性:像素大灯的设计更加灵活,可以集成到车辆的前脸设计中,提升车辆的外观和风格。
自动适应:像素大灯可以与车辆的其他系统(如传感器、摄像头和导航系统)集成,实现自动适应各种驾驶条件。
提高安全性:通过提供更好的照明,像素大灯有助于提高夜间和恶劣天气条件下的行车安全。
未来升级潜力:随着技术的发展,像素大灯可以通过软件更新来提升功能,为未来的车辆照明技术发展提供了可能性。
像素大灯通过其高度可定制化和智能化的照明能力,为驾驶员提供了更安全、更舒适、更智能的驾驶体验。
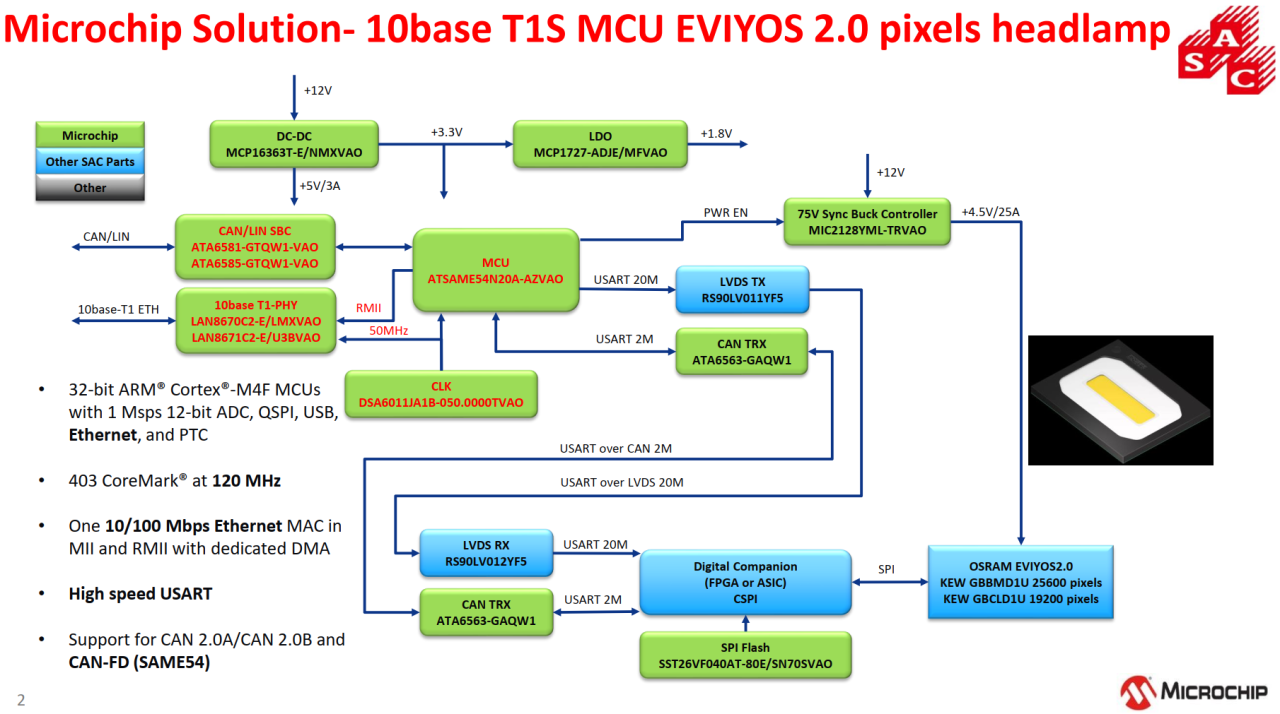
1、采用ams OSRAM的EVIYOS 2.0一体式像素化LED,包含了25600个独立可控的发光像素,可以非常方便地实现高分辨率与防眩智能远光、图像与安全警示投影、精确的道路照明等功能,不仅提升了车辆照明系统的性能,还通过创新的方式增强了驾驶员与车辆周围人员的安全性。
2、采用Microchip ATSAME54 120MHz高性能MCU作为主控,运行FreeRTOS系统,通过高速USART对EVIYOS进行配置和视频数据通讯。通过以太网RMII接口外接LAN8670 10base T1-PHY实现10M车载以太网通讯。
3、通过标准的网络视频流传输协议实现实时视频传输,你可以将像素大灯简单地理解为一个以太网接口的显示屏,主机上播放什么就显示什么。无需在车灯上存储图片和视频,无需OTA,降低成本的同时也大大提高了显示内容的灵活性和扩展性。
4、采用Microchip高压大电流同步降压控制器MIC2128外接MOS和电感组成同步降压电源,为LED供电,输出4.5V/25A。
5、品佳集团提供ATSAME54_EVIYOS_SDK和示例工程源代码帮助客户快速搭建好开发环境,点亮EVIYOS LED。 输入电压: DC 9V~24V
LED光源: ams OSRAM EVIYOS 2.0
像素点阵: KEW GBBMD1U 320x80 25600像素、KEW GBCLD1U 240x80 19200像素
主控MCU: ATSAME54 32-bit ARM® Cortex®-M4F, 403 CoreMark® at 120 MHz,以太网接口
CAN通讯: 支持CAN-FD通讯
LIN通讯: 支持LIN通讯
以太网通讯: LAN8670/LAN8671 10base T1S 10M车载以太网
额定功率: 100W
最大功率: 200W
温度监测: 可实时监测LED光源温度,便于实现自动温控►场景应用图

►产品实体图

►展示板照片


►方案方块图
►核心技术优势
►方案规格
- Microchip推出全新BZPACK mSiC®功率模块,专为恶劣环境下高要求应用而设计
- Mythic®选用Microchip旗下冠捷半导体(SST®)的memBrain™技术
- Microchip推出LX4580高集成度24通道混合信号IC,专为航空与防务执行系统设计
- Microchip Technology与现代汽车集团合作探索适用于未来车载连接的10BASE-T1S单对以太网技术
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
- Microchip Technology与现代合作 探索先进车载网络解决方案
- Microchip推出全新电源模块,提升AI数据中心功率密度与能效
- Microchip扩展maXTouch® M1触摸屏控制器系列 以覆盖更广泛的显示屏尺寸
- Microchip推出PIC32CM PL10 MCU系列,进一步扩展其 Arm@ Cortex@-M0+产品组合
- Microchip扩展maXTouch@ M1触摸屏控制器系列,实现更广泛的屏幕尺寸覆盖
- 嵌入式的风向变了:2026纽伦堡嵌入式展透露这些趋势
- 高通确认不在GDC 2026发布新款骁龙G系列掌机处理器SoC
- 阿里达摩院发布玄铁C950,打破全球RISC-V CPU性能纪录
- 行业评论 从工具到平台:如何化解跨架构时代的工程开发和管理难题
- Mujoco中添加Apriltag标签并实现相机识别教程
- 面向嵌入式部署的神经网络优化:模型压缩深度解析
- 摩尔线程MTT S5000全面适配Qwen3.5三款新模型
- 英飞凌与宝马集团携手合作,基于Neue Klasse架构塑造软件定义汽车的未来
- 物理AI仿真新突破:摩尔线程与五一视界共建全栈国产化生态
- 爆火的OpenClaw! 告别云端,米尔RK3576开发板本地部署
- 中国芯片研发重要成果!中科院发布香山、如意系统
- Miniconda环境隔离教程:解决Python版本冲突的完整指南
- Jetson GPU Burn烤机测试与PTX编程详解
- LabelImg安装使用教程:YOLOv12训练数据标注完整指南
- 根据题意,水位上升记为正,下降记为负。汛期水位上升3分米(即0.3米)记作+3分米,此时达到最高水位12.5米,因此基准水位(记作0时的水位)为: 12.5米 - 0.3米 = 12.2米。 汛期过后水位下降4分米(即0.4米),是从最高水位下降,故实际水位为: 12.5米 - 0.4米 = 12.1米。 实际水位相对于基准水位的变化量为: 12.1米 - 12.2米 = -0
- YOLOv12训练实战:train.py常用参数详解
- Altera 与 Arm 深化合作,共筑 AI 数据中心高效可编程新方案
- 莱迪思加入英伟达 Halos生态系统,通过Holoscan传感器桥接技术提升物理人工智能安全性
- 芯科科技闪耀2026嵌入式世界展 以Connected Intelligence赋能,构建边缘智能网联新生态
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

FollowMe 第二季:3 - EK_RA6M5 开发板入门
-

FollowMe 第二季: 1 Adafruit Circuit Playground Express及任务讲解
-

Azure RTOS step by step workshop
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

从0到1:树莓派与物联网教程(英文)
-

设计汽车集群电源
-

6晶体管H桥
-

温度控制风扇
-

USB LED调光器
-

AVR PC步进电机驱动器
-

AVR温度计TCN75