



stm32单片机控制好盈电调带动T80电机转动
2025-09-01 来源:cnblogs
电调的控制原理
我们为什么需要电调
无刷电机的转速、正反等指标都是通过改变控制信号(PWM)的占空比、频率来实现的,我们用单片机很容易实现对PWM的控制,但是,以单片机那小IO口的驱动能力,带动一个500W的电机是不现实的,所以我们想实现一个小电流控制大电流的效果,就像直流有刷电机用L298N电机驱动器驱动一样,我们无刷电调控制无刷电机。
输入电调控制信号的要求
我也是第一次用(就是不确定的意思),好像大部分电调都是需要50Hz的PWM脉冲频率,其中,高电平的脉宽需要在1-2ms,50Hz就是20ms周期的方波,其中高电平时间是1-2ms,那占空比就是5%-10%。
怎么解锁电调
今天调了很长时间,电机就是不动,接线也对,pwm信号给的也合理,后来查阅了几个文章发现了如下的操作流程。
单片机给2ms高电平(最大油门),此时电调不上电
电调上电
单片机给1ms高电平(最小油门)(解锁完成)
给任意1-2ms范围内的高电平,转了
每一次电调从断电到运行,只需要进行一次这样的4步操作,之后就可以随意在范围内调节占空比了。
电调的接线
我所用的电调是好盈40A的贴片电调。
接线图来自官网的使用说明书: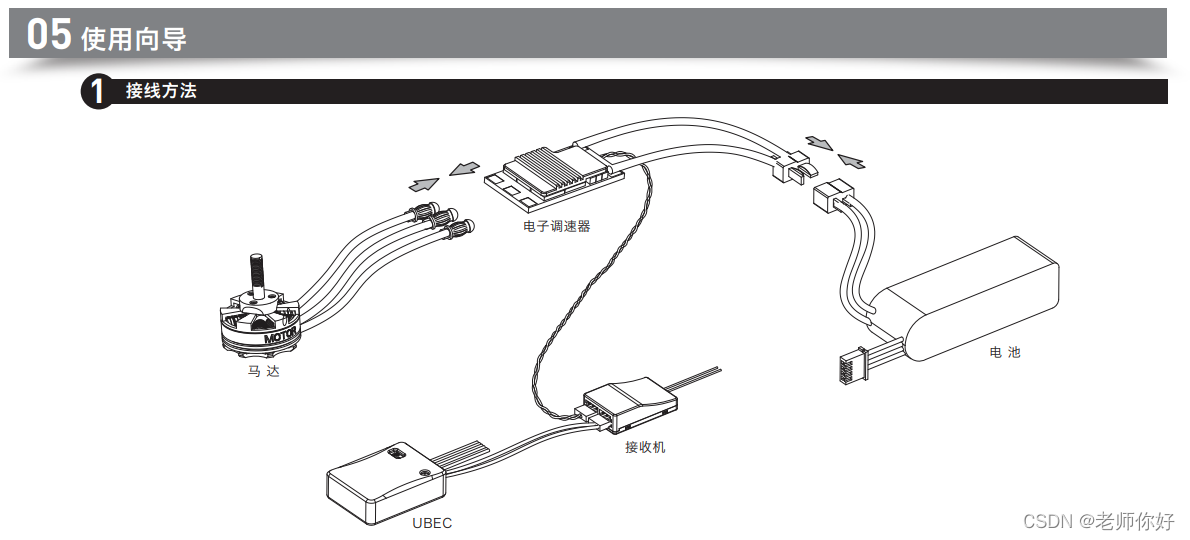
电调的三相电端口接无刷电机的三个端子
电调的两个信号端口接单片机的PWM信号
电调的红黑铜线接电池的正负
这在硬件上就算是接完了。
单片机代码部分
我用的正点原子的mini板,主控芯片为STM32RCT6。
PWM配置
以下为pwm.c文件里的配置,这里用的是正点原子例程“PWM输出实验”。
只改了一句话,把PWM的模式从PWM2改到了PWM1,为的是后续的参数设置方便。
PWM从PA8引脚输出,对应的是TIM1 的通道1。
相应的主函数中,设置自动重装值,预分频系数。
这是TIM1_PWM_Init()的定义:
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
这是主函数里的配置:
TIM1_PWM_Init(19999,71);//不分频。PWM频率=72000000/(19999+1)(71+1)=50Hz
按键的配置
按键配合pwm输出代码如下:
while(1)
{
t=KEY_Scan(0); //得到键值
switch(t)
{
case KEY0_PRES: TIM_SetCompare1(TIM1,2000);
break;
case KEY1_PRES: TIM_SetCompare1(TIM1,1000);
break;
case WKUP_PRES: TIM_SetCompare1(TIM1,1500);
break;
default:
delay_ms(10);
}
}
2000对应最大油门,1000对应最小油门,那么结合之前谈到的怎么解锁电机,我该如何操作就很清晰了。
按下开发板上的KEY0按键,给最大油门
电调上电
按下开发板上的KEY1按键,给最小油门(解锁完成)
任意给占空比就可以了
完整代码
主函数
#include 'led.h'
#include 'delay.h'
#include 'sys.h'
#include 'pwm.h'
#include 'key.h'
#include 'usart.h'
//ALIENTEK Mini STM32开发板范例代码8
//PWM输出实验
//技术支持:www.openedv.com
//广州市星翼电子科技有限公司
int m = 0;
int main(void)
{
u8 t=0;
delay_init(); //延时函数初始化
KEY_Init(); //按键初始化
TIM1_PWM_Init(19999,71);//不分频。PWM频率=72000000/(19999+1)(71+1)=50Hz
while(1)
{
t=KEY_Scan(0); //得到键值
switch(t)
{
case KEY0_PRES: TIM_SetCompare1(TIM1,2000);
break;
case KEY1_PRES: TIM_SetCompare1(TIM1,1000);
break;
case WKUP_PRES: TIM_SetCompare1(TIM1,1500);
break;
default:
delay_ms(10);
}
}
}
pwm.c
#include 'pwm.h'
#include 'led.h'
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK Mini STM32开发板
//PWM 驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2010/12/03
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 正点原子 2009-2019
//All rights reserved
//
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能
//设置该引脚为复用输出功能,输出TIM1 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能
TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
key.c
#include 'key.h'
#include 'delay.h'
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK Mini STM32开发板
//按键输入 驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//修改日期:2014/3/06
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//
//按键初始化函数
//PA15和PC5 设置成输入
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC,ENABLE);//使能PORTA,PORTC时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//关闭jtag,使能SWD,可以用SWD模式调试
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;//PA15
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA15
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//PC5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//PA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0
}
//按键处理函数
//返回按键值
//mode:0,不支持连续按;1,支持连续按;
//返回值:
//0,没有任何按键按下
//KEY0_PRES,KEY0按下
//KEY1_PRES,KEY1按下
//WKUP_PRES,WK_UP按下
//注意此函数有响应优先级,KEY0>KEY1>WK_UP!!
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;//按键按松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||WK_UP==1))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY0==0)return KEY0_PRES;
else if(KEY1==0)return KEY1_PRES;
else if(WK_UP==1)return WKUP_PRES;
}else if(KEY0==1&&KEY1==1&&WK_UP==0)key_up=1;
return 0;// 无按键按下
}
后续测试程序
后续调的时候有写了这个代码,算是各种情况的汇总。(有的是注释状态)
有单向模式的按键行程校准、自动启动两个程序
有双向模式的按键启动、自动启动两个程序
moter_setup()函数是我调试出来的自动启动函数,这个演示1.5s纯粹是试出来的,而且我是单片机和电调同时上电,好用。 如果单片机和电调上电的时间差的绝对值稍大,可能就不好使了(进入了校准状态而非启动状态)
void moter_setup(void)
{
TIM_SetCompare1(TIM1,2000);
delay_ms(500);
delay_ms(500);
delay_ms(500);
TIM_SetCompare1(TIM1,1500);
delay_ms(500);
delay_ms(500);
delay_ms(500);
}
#include 'led.h'
#include 'delay.h'
#include 'sys.h'
#include 'pwm.h'
#include 'key.h'
#include 'usart.h'
//ALIENTEK Mini STM32开发板范例代码8
//PWM输出实验
//技术支持:www.openedv.com
//广州市星翼电子科技有限公司
int main(void)
{
int mid = 1500;//3d模式中位(不转)
int detaf = 50;//改变ccr的间隔
int f = 1500; //ccr初始化
u8 t=0;
delay_init(); //延时函数初始化
KEY_Init(); //按键初始化
TIM1_PWM_Init(19999,71);//不分频。PWM频率=72000000/(19999+1)(71+1)=50Hz
/*************************************************************************/
单项模式,按键校准
// while(1)
// {
// t=KEY_Scan(0); //得到键值
// switch(t)
// {
// case KEY0_PRES:
// TIM_SetCompare1(TIM1,2000);//最大
// break;
//
// case KEY1_PRES:
// TIM_SetCompare1(TIM1,1200);//中位
// break;
//
// case WKUP_PRES:
// TIM_SetCompare1(TIM1,1000); //任意
// break;
//
// default:
// delay_ms(10);
// }
// }
/*********************************************************************************/
/***************************************************************************/
单向模式,自动校准
// TIM_SetCompare1(TIM1,2000);
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// TIM_SetCompare1(TIM1,1000);
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// while(1)
// {
// TIM_SetCompare1(TIM1,1500);
// }
/****************************************************************************/
/*****************************************************************************/
//双向模式,按键校准、增减程序
// while(1)
// {
// t=KEY_Scan(0); //得到键值
// switch(t)
// {
// case KEY0_PRES:
// f = f+ detaf;
// if(f <= 2000)
// TIM_SetCompare1(TIM1,f);//最大
// else
// delay_ms(10);
// break;
//
// case KEY1_PRES:
// TIM_SetCompare1(TIM1,mid);//中位
// break;
//
// case WKUP_PRES:
// f = f - detaf;
// if(f >= 1000)
// TIM_SetCompare1(TIM1,f); //任意
// else
// delay_ms(10);
// break;
//
// default:
// delay_ms(10);
// }
// }
/**************************************************************************/
/***********************************************************************/
双向模式,自动校准
// TIM_SetCompare1(TIM1,2000);
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// TIM_SetCompare1(TIM1,1500);
// delay_ms(500);
// delay_ms(500);
// delay_ms(500);
// while(1)
// {
// TIM_SetCompare1(TIM1,2000);
// }
moter_setup();
while(1)
{
t=KEY_Scan(0); //得到键值
switch(t)
{
case KEY0_PRES:
if(f <= 2000){
f = f+ detaf;
TIM_SetCompare1(TIM1,f);}//最大
else
delay_ms(10);
break;
case KEY1_PRES:
TIM_SetCompare1(TIM1,mid);//中位(停)
break;
case WKUP_PRES:
if(f >= 1000){
f = f - detaf;
TIM_SetCompare1(TIM1,f);} //任意
else
delay_ms(10);
break;
default:
delay_ms(10);
}
}
}
高亮出来的这部分程序是有按键模拟摇杆的功能,每按下一次按键,占空比就会更改一点,更改的分度值是detaf变量的值,本程序中是50。
还没完全理解的问题
关于电机的正反
我把电调的参数设置成1000-2000行程,中位数1500,然后我的电机就是1500对应不转,2000是正转最大速度,1000是反转最大速度,我的猜测是,1000-2000是可分配给正反转的总区间,中位设到1500就是平均分配了这段区间,不想要反转,想要极致的正转的话就把中位设置到1000,这样整个区间就全是正转了,当然,同时丧失了反转的功能。
以上我不确定,明天改改电调参数试试。
---------------------------------------------------分割线------------------------------------
这部分调试过了,确实是我想的这样,电调的参数设置到3d模式,然后把中位数调到某一个值,这个值以上就是正转,这个值以下就是反转。
但是转速的增加是通过增大电调电机进角实现的。。。
关于上电的顺序
我发现我先给电调上电,再给最大油门,听到嘀-嘀-嘀-,滴-----,再给最小油门,滴------,之后,也可以实现解锁电调。
-----------------------------分割线--------------------------------------------------------
经过我的实践,好像和上电顺序好像没关系,就是:先打开电调,再依次给最大油门,最小油门,也能解锁电调,甚至都不需要给最大油门,给任意一个比最小油门大的数,都可以解锁电调。。
关于程序结构
我现在是用按键来控制最大油门和最小油门的输入,当程序实现自动解锁电调时,还没有写过,预计是用延时函数写,但是具体演示多少时间还要去试,我得保证给最大油门后,听见嘀-嘀-嘀-,滴-----之后,再给最小油门,最小油门在最大油门被识别之后,给慢了可以,给早了就不行了。
---------------分割线--------------------------------------------------------
这部分都调过了,加到了上面后续测试程序里。
- 意法半导体中国本地造STM32微控制器启动规模量产
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 基于机智云与STM32的智能拐杖安全监测系统在养老物联网中的应用
- 内置全栈安全,一站式满足CRA法案与IEC 62443标准——米尔STM32MP257核心板
- 如何用 STM32 FLASH 实现等效 100 万次擦写的 EEPROM 功能?
- 实战解析:通过一个小项目掌握STM32所有外设
- STM32学了两年半,却还是不会做项目
- 意法半导体推出最新STM32MP21微处理器,兼具高性价比、低功耗、高灵活性
- 基于STM32的矿井作业环境监测系统设计与实现
- 六大全新产品系列推出,MCX A微控制器家族迎来创新
- 意法半导体全新STM32C5系列,重新定义入门级微控制器性能与价值,赋能万千智能设备
- 从控制到系统:TI利用边缘AI重塑嵌入式MCU的边界
- 模组复用与整机重测在SRRC、CCC、CTA/NAL认证中的实践操作指南
- 有源晶振与无源晶振的六大区别详解
- 英飞凌持续巩固全球微控制器市场领导地位
- 使用 Keil Studio for Visual Studio Code开发 STM32 设备
- 蓝牙信道探测技术原理与开发套件实践
- LoRa、LoRaWAN、NB-IoT与4G DTU技术对比及工业无线方案选型分析
- Microchip 推出生产就绪型全栈边缘 AI 解决方案,赋能MCU和MPU实现 智能实时决策
-

【TI MSPM0 应用实战】智能小车+工业角度编码器+血氧仪+烟雾探测器!硬核参考设计详解!
-

2022 Digi-Key KOL 系列: 你见过1GHz主频的单片机吗?Teensy 4.1开发板介绍
-

TI 新一代 C2000™ 微控制器:全方位助力伺服及马达驱动应用
-

MSP430电容触摸技术 - 防水Demo演示
-

直播回放: Microchip Timberwolf™ 音频处理器在线研讨会
-

基于灵动MM32W0系列MCU的指夹血氧仪控制及OTA升级应用方案分享
-

1瓦四级调频发射机
-

500W MOS场效应管电源逆变器,12V转110V/220V
-

12V 转 28V DC-DC 变换器(基于 LM2585)
-

红外开关
-

12V转110V/220V 500W逆变器
-

DS1669数字电位器