



历史上的今天
今天是:2024年11月09日(星期六)

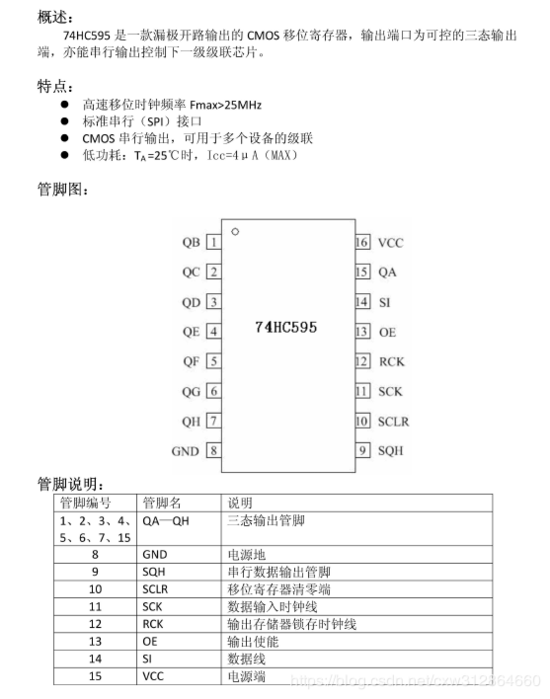
2019年11月09日 | STM32 74HC595驱动程序
2019-11-09 来源:eefocus
以下为.h文件:
#ifndef __74HC595_H__
#define __74HC595_H__
#include "stm32f10x.h"
#define SHCP_GPIO_PORT GPIOA
#define SHCP_GPIO_CLK RCC_APB2Periph_GPIOA
#define SHCP_GPIO_PIN GPIO_Pin_1
#define STCP_GPIO_PORT GPIOA
#define STCP_GPIO_CLK RCC_APB2Periph_GPIOA
#define STCP_GPIO_PIN GPIO_Pin_0
#define DS_GPIO_PORT GPIOB
#define DS_GPIO_CLK RCC_APB2Periph_GPIOB
#define DS_GPIO_PIN GPIO_Pin_1
#define HC595_SHCP_Low() GPIO_ResetBits( SHCP_GPIO_PORT, SHCP_GPIO_PIN )
#define HC595_SHCP_High() GPIO_SetBits( SHCP_GPIO_PORT, SHCP_GPIO_PIN )
#define HC595_STCP_Low() GPIO_ResetBits( STCP_GPIO_PORT, STCP_GPIO_PIN )
#define HC595_STCP_High() GPIO_SetBits( STCP_GPIO_PORT, STCP_GPIO_PIN )
#define HC595_Data_Low() GPIO_ResetBits( DS_GPIO_PORT, DS_GPIO_PIN )
#define HC595_Data_High() GPIO_SetBits( DS_GPIO_PORT, DS_GPIO_PIN )
void HC595_GPIO_Config(void);
void HC595_Send_Byte(u8 byte);
void HC595_CS(void);
void HC595_Send_Multi_Byte(u8 *data, u16 len);
#endif
以下为.c文件:
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "74HC595.h"
void delay(uint16_t t);
/******** 74HC595 GPIO 配置 *************************/
void HC595_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( SHCP_GPIO_CLK | STCP_GPIO_CLK | DS_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = SHCP_GPIO_PIN;
GPIO_Init(SHCP_GPIO_PORT, &GPIO_InitStructure); // 初始化 SHCP 引脚
GPIO_InitStructure.GPIO_Pin = STCP_GPIO_PIN;
GPIO_Init(STCP_GPIO_PORT, &GPIO_InitStructure); // 初始化 STCP 引脚
GPIO_InitStructure.GPIO_Pin = DS_GPIO_PIN;
GPIO_Init(DS_GPIO_PORT, &GPIO_InitStructure); // 初始化 DS 引脚
GPIO_ResetBits(SHCP_GPIO_PORT, SHCP_GPIO_PIN); // 引脚初始状态为高,便于产生上升沿
GPIO_ResetBits(STCP_GPIO_PORT, STCP_GPIO_PIN);
GPIO_ResetBits(DS_GPIO_PORT, DS_GPIO_PIN);
}
/***
*74HC595 发送一个字节
*即往74HC595的DS引脚发送一个字节
*/
void HC595_Send_Byte(u8 byte)
{
u8 i;
for (i = 0; i < 8; i ++) //一个字节8位,传输8次,一次一位,循环8次,刚好移完8位
{
/**** 步骤1:将数据传到DS引脚 ****/
if (byte & 0x80) //先传输高位,通过与运算判断第八是否为1
HC595_Data_High(); //如果第八位是1,则与 595 DS连接的引脚输出高电平
else //否则输出低电平
HC595_Data_Low();
/*** 步骤2:SHCP每产生一个上升沿,当前的bit就被送入移位寄存器 ***/
HC595_SHCP_Low(); // SHCP拉低
delay(1); // 适当延时
HC595_SHCP_High(); // SHCP拉高, SHCP产生上升沿
delay(1);
byte <<= 1; // 左移一位,将低位往高位移,通过 if (byte & 0x80)判断低位是否为1
}
}
/**
*74HC595输出锁存 使能
**/
void HC595_CS(void)
{
/** 步骤3:STCP产生一个上升沿,移位寄存器的数据移入存储寄存器 **/
HC595_STCP_Low(); // 将STCP拉低
delay(1); // 适当延时
HC595_STCP_High(); // 再将STCP拉高,STCP即可产生一个上升沿
delay(1);
}
/**
*发送多个字节
*便于级联时数据的发送
*级联N级,就需要发送N个字节控制HC595
***/
void HC595_Send_Multi_Byte(u8 *data, u16 len)
{
u8 i;
for (i = 0; i < len; i ++ ) // len 个字节
{
HC595_Send_Byte(data[i]);
}
HC595_CS(); //先把所有字节发送完,再使能输出
}
void delay(uint16_t t)
{
for (; t != 0; t --);
}
关于HC595_Send_Multi_Byte函数的使用要根据实际的硬件情况来,以下为一个例子,可以参考一下:
程序中的相关数据:
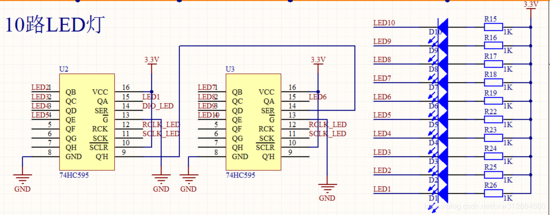
u8 Led_Buf[2] = {0xff, 0xff}; //存储要发送的指令字节,也就是灯的状态 Led_Buf[0]控制灯6-10;Led_Buf[1]控制灯1-5
u8 Led_All_Off[2] = {0xff, 0xff}; //LED灯全灭
u8 Led_All_On[2] = {0x00, 0x00}; //LED灯全亮
HC595_Send_Multi_Byte(Led_All_On,2);//10路灯全开
HC595_Send_Multi_Byte(Led_All_Off,2);//10路灯全关
实现流水灯效果:
/******************************************************
*流水灯程序
*******************************************************/
void LED_ShowOneToOne(void)
{
u8 pos; // led位置
u8 Led_Show[2] = {0xff, 0xff}; //存储要发送的指令字节, Led_Show[0]控制灯6-10; Led_Show[1]控制灯1-5
//第X个led亮 :1 2 3 4 5
u8 Waterfall_Led[20] = {0xfe, 0xfd, 0xfb, 0xf7, 0xef, //控制第一级74HC595
0xff, 0xff, 0xff, 0xff, 0xff,
//第X个led亮 :6 7 8 9 10
0xff, 0xff, 0xff, 0xff, 0xff, //控制第二级74HC595
0xfe, 0xfd, 0xfb, 0xf7, 0xef };
for (pos = 0; pos < 10; pos ++) //第pos个灯,实现流水灯效果
{
Led_Show[1] = Waterfall_Led[pos]; //存放第一级74HC595数据,因为先进先出,所以第一级放在Led_Pos_Buf[1],而不是Led_Pos_Buf[0]
Led_Show[0] = Waterfall_Led[pos+10]; //存放第二级74HC595的数据
HC595_Send_Multi_Byte(Led_Show,2); //将当前数据发送到595
delay_ms(500);
}
}
史海拾趣
|
GPS只能在室外定位,但若需要在室内实现定位功能怎么办呢?利用ZIGBEE技术实现定位就是一种不错的解决方案,同时该技术也可在室外实现定位。 资料下载-- http://www.wxlsoc.com/download/shows.aspx?id=28… 查看全部问答> |
|
求教各位高手,我现在想让skype在wince 5.0 上跑起来 ,我在网上看到说要找到skype for ppc 依赖哪些库文件 ,请问如何察看阿 , 我用vc下depends 和evc下depends 察看的 ,怎么出来的都是windows XP 下的库文件 ...… 查看全部问答> |
|
WINCE 6.0, VS2005 程序是一个任务管理器,几个对话框,主要操作是CTabCtrl加载几个对话框,(对话框由dialog create),在几个dialog中分别做的是1.每隔一段时间获得CPU和内存的状态,画图 2.获得当前运行的进程,显示于列表中 3.获得当前可见的 ...… 查看全部问答> |
|
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity read_write is port( clk : in std_logic ; mcu_oe : in std_logic; ...… 查看全部问答> |
|
与前面已讲述的电场屏蔽及磁场屏蔽的机理不同,电磁屏 蔽对于电磁波的衰减有三种不同的机理: x 当电磁波在到达屏蔽体表面时,由于空气与金属的交界面上 阻抗的不连续,对入射波产生的反射。这种反射不要求屏蔽 材料必须有一定厚度,只要求交界 ...… 查看全部问答> |
|
介绍一下KEIL C51所支持的C语言和汇编语言混合编程的方法! 51单片机是最早的单片机,也是在国内应用最广泛的单片机,为大家所喜爱!但执行速度较其它单片机较慢。因此在编程时更加要注重程序的执行效率及编程上的技巧处理,最大限度的发挥其性能,满足项目开发的实际需要。在嵌入 ...… 查看全部问答> |