



历史上的今天
今天是:2025年03月01日(星期六)
2021年03月01日 | 几大坐标系决定工业机器人精确性
2021-03-01 来源:elecfans
坐标系:为确定机器人的位置和姿态而在机器人或空间上进行的位置指标系统。
坐标系包含:
1、基坐标系(Base Coordinate System)
2、大地坐标系(World Coordinate System)
3、工具坐标系(Tool Coordinate System)
4、工件坐标系(Work Object Coordinate System)
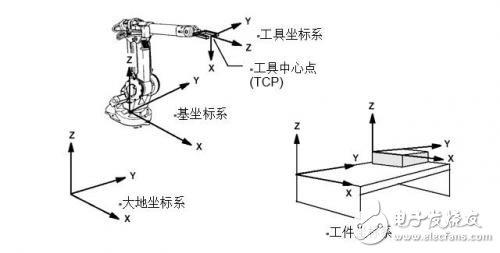
1、工具坐标系
机器人工具座标系是由工具中心点 TCP 与座标方位组成。
机器人联动运行时,TCP 是必需的。
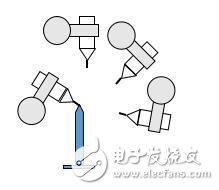
1) Reorient 重定位运动(姿态运动)机器人 TCP 位置不变,机器人工具沿座标轴转动,改变姿态。
2) Linear 线性运动机器人工具姿态不变,机器人 TCP 沿座标轴线性移动。
机器人程序支持多个 TCP,可以根据当前工作状态进行变换。
机器人工具被更换,重新定义 TCP 后,可以不更改程序,直接运行。


工业机器人坐标系介绍1.1.定义工具坐标系的方法:
1、N(N>=4)点法/TCP法-机器人 TCP 通过N种不同姿态同某定点相碰,得出多组解,通过计算得出当前 TCP 与机器人手腕中心点 ( tool0 ) 相应位置,座标系方向与 tool0 一致。
2、TCP&Z法-在N点法基础上,Z点与定点连线为座标系 Z 方向。
3、TCP&X,Z法-在N点法基础上,X点与定点连线为座标系 X 方向,Z点与定点连线为座标系 Z 方向。
2. 工件坐标系
机器人工件座标系是由工件原点与座标方位组成。
机器人程序支持多个 Wobj,可以根据当前工作状态进行变换。
外部夹具被更换,重新定义 Wobj 后,可以不更改程序,直接运行。
通过重新定义 Wobj,可以简便的完成一个程序适合多台机器人。
2.1.定义工件坐标系的方法:
三点法-点 X1 与 点 X2 连线组成 X 轴,通过点 Y1 向 X 轴作的垂直线,为 Y 轴。
上一篇:机器视觉在工业自动化中的应用
史海拾趣
|
经过前两次的边做边学,我们已经创建并可以自由修改自己的平台了,这次我平来补充一点理论知识,以便加深对CE生成过程的了解。在此之前,需要说明的是CE的目录结构是很庞大而复杂的,在以后的工作中很多事情会取决于你对目录结构的了解程度,在此, ...… 查看全部问答> |
|
之前在搞定这5个RC振荡电路让你的模拟设计顺畅很多 里wangjiafu1985说文氏桥是经典中的经典,同时SOSO也建议对这个经典中的经典开个讨论的专贴,因此开了此贴以供大家讨论文氏桥震荡电路。 下面我就抛砖引玉做个简单介绍。 & ...… 查看全部问答> |
|
【分享】飞凌S3C6410 NAND Flash驱动程序 WindowsCE版 这段时间一直在研究S3C6410 NAND驱动,把找到的一些源码发出来,希望对正在做这部分的朋友有所帮助。 由于内容比较长,受字数和篇幅限制,详细代码可以在附件中下载。 本文转引自 飞凌嵌入式 ARM11 OK ...… 查看全部问答> |
|
1. LD A, #$10 2. LD A, $10 3. LD A, ($10,SP) 4. LD A,($10,X) 第一个$10,是个立即数10H 第二个$10是内存地址10H 第三个$10是什么? 第四个$10应该是内存地址10H,还是数字10H? 感觉STM的文档,没有仔细说明语法.很难理解… 查看全部问答> |